Steppability-informed Quadrupedal Contact Planning through Deep Visual Search Heuristics
作者: Max Asselmeier, Ye Zhao, Patricio A. Vela
分类: cs.RO
发布日期: 2024-12-30
💡 一句话要点
提出基于深度视觉搜索启发式的四足机器人可行足点规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 足点规划 深度学习 可行性预测 视觉导航
📋 核心要点
- 现有足点规划方法在复杂地形中效率低,难以保证机器人安全。
- 利用深度学习在图像空间预测地形可行性,指导足点规划,提升效率。
- 通过合成数据训练可行性模型,并集成到足点规划器中,实验验证有效性。
📝 摘要(中文)
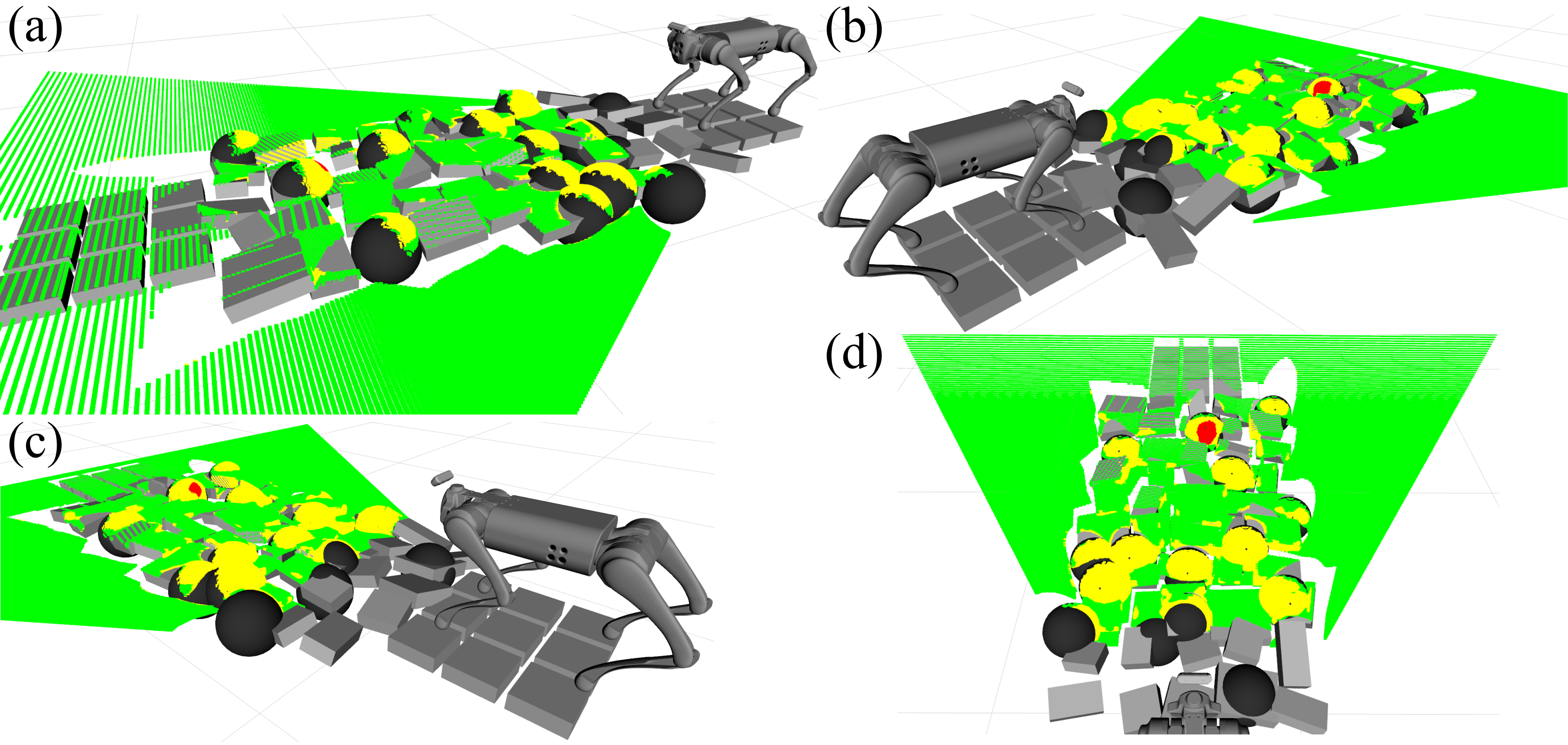
本文提出了一种预测环境可行性的方法,即腿式机器人平台在局部环境中特定位置放置落脚点的能力,该方法在图像空间中进行。这种新颖的环境表示捕捉了局部地形的关键几何属性,同时允许我们利用在图像空间中进行感知和规划的计算优势。我们采用基于原始形状的合成数据生成方案来创建几何上丰富且多样的模拟场景,并提取地面真实语义信息以训练可行性模型。然后,我们将此可行性模型集成到现有的基于交错图搜索和轨迹优化的足迹规划器中,以展示这种可行性范例如何为复杂、未知环境中的足迹规划提供信息。我们分析了可行性模型的性能以证明其有效性,并在离线和在线环境中部署了感知信息足迹规划器,以实验验证规划性能。
🔬 方法详解
问题定义:现有的四足机器人足点规划方法在复杂、未知的环境中面临挑战。传统的几何方法计算复杂度高,难以实时规划;而基于学习的方法通常需要大量真实数据,泛化能力有限。因此,需要一种能够高效、准确地评估地形可行性,并指导足点规划的方法。
核心思路:本文的核心思路是利用深度学习在图像空间中预测地形的可行性(steppability),即机器人在此位置放置足部的能力。通过将环境表示为图像,可以利用卷积神经网络提取视觉特征,并预测每个像素位置的可行性得分。这种方法能够充分利用图像处理的优势,提高计算效率。
技术框架:该方法包含以下几个主要步骤:1) 使用基于原始形状的合成数据生成方案创建几何上丰富且多样的模拟场景;2) 从模拟场景中提取地面真实语义信息,用于训练可行性模型;3) 使用训练好的可行性模型预测图像空间中的可行性得分;4) 将可行性得分集成到现有的基于交错图搜索和轨迹优化的足迹规划器中,指导足点规划。
关键创新:该方法最重要的创新点在于将深度学习与足点规划相结合,利用图像空间的可行性预测来指导足点规划。与传统的几何方法相比,该方法能够更高效地评估地形可行性;与基于学习的方法相比,该方法通过合成数据训练,降低了对真实数据的依赖。
关键设计:在数据生成方面,使用了基于原始形状的合成数据,以保证数据的多样性和几何丰富性。在网络结构方面,使用了卷积神经网络提取图像特征,并预测每个像素位置的可行性得分。在损失函数方面,使用了交叉熵损失函数,用于衡量预测的可行性得分与地面真实值之间的差异。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法能够有效地预测地形可行性,并提高足点规划的效率和安全性。在离线和在线环境中,该方法都能够成功地规划出可行的足迹,并使四足机器人安全地通过复杂地形。具体的性能数据(例如规划时间、成功率等)在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于各种四足机器人应用场景,例如搜索救援、地形勘探、物流运输等。通过提高四足机器人在复杂地形中的自主导航能力,可以使其在人类难以到达或危险的环境中执行任务,具有重要的实际价值。未来,该方法可以进一步扩展到其他类型的机器人,例如轮式机器人和人形机器人。
📄 摘要(原文)
In this work, we introduce a method for predicting environment steppability -- the ability of a legged robot platform to place a foothold at a particular location in the local environment -- in the image space. This novel environment representation captures this critical geometric property of the local terrain while allowing us to exploit the computational benefits of sensing and planning in the image space. We adapt a primitive shapes-based synthetic data generation scheme to create geometrically rich and diverse simulation scenes and extract ground truth semantic information in order to train a steppability model. We then integrate this steppability model into an existing interleaved graph search and trajectory optimization-based footstep planner to demonstrate how this steppability paradigm can inform footstep planning in complex, unknown environments. We analyze the steppability model performance to demonstrate its validity, and we deploy the perception-informed footstep planner both in offline and online settings to experimentally verify planning performance.