Humanoid Robot RHP Friends: Seamless Combination of Autonomous and Teleoperated Tasks in a Nursing Context
作者: Mehdi Benallegue, Guillaume Lorthioir, Antonin Dallard, Rafael Cisneros-Limón, Iori Kumagai, Mitsuharu Morisawa, Hiroshi Kaminaga, Masaki Murooka, Antoine Andre, Pierre Gergondet, Kenji Kaneko, Guillaume Caron, Fumio Kanehiro, Abderrahmane Kheddar, Soh Yukizaki, Junichi Karasuyama, Junichi Murakami, Masayuki Kamon
分类: cs.RO, cs.HC
发布日期: 2024-12-30 (更新: 2025-01-16)
备注: IEEE Robotics and Automation Magazine, In press
💡 一句话要点
RHP Friends:面向护理场景的自主与遥操作无缝融合人形机器人
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 遥操作 自主操作 护理机器人 人机协作
📋 核心要点
- 现有机器人难以在复杂的人类环境中灵活执行多样化任务,尤其是在护理等需要精细操作和人机协作的场景。
- RHP Friends机器人通过集成移动操作、多接触运动、遥操作和物体检测跟踪等技术,实现了自主与遥操作的无缝融合。
- 该系统在护理场景中进行了演示,成功完成了病人转移和断路器操作等任务,验证了其在实际应用中的潜力。
📝 摘要(中文)
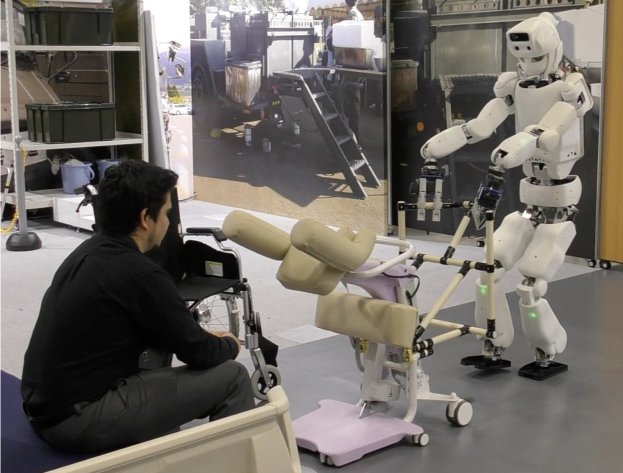
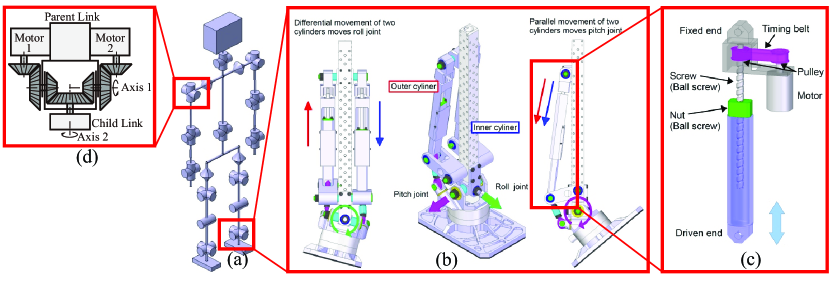
本文介绍了RHP Friends,一款旨在实现人机共存环境中辅助机器人部署的社交人形机器人。以护理应用为例,通过扩展其操作人类设备和工具的能力,并支持远程辅助操作,展示了其潜在用途。为了满足人类设计环境中各种任务和情况的需求,我们开发了一个无缝集成纤薄轻巧机器人和多种技术的系统:包括移动操作、多接触运动、遥操作以及物体检测和跟踪。我们展示了该系统在护理应用中的使用,机器人高效地执行了日常的病人转移任务和非日常任务,即操作断路器。该演示在2023年国际机器人展览会(IREX)上进行,每天三次,持续三天。
🔬 方法详解
问题定义:现有机器人难以在为人类设计的复杂环境中执行任务,尤其是在护理场景中,需要机器人能够操作各种人类设备和工具,并与人类进行协作。现有的方法通常难以兼顾机器人的灵活性、自主性和安全性,限制了其在实际护理场景中的应用。
核心思路:本文的核心思路是将自主操作和遥操作无缝融合,使机器人能够根据任务需求和环境状况,灵活地切换操作模式。通过自主操作完成常规任务,并通过遥操作处理复杂或突发情况,从而提高机器人的适应性和可靠性。
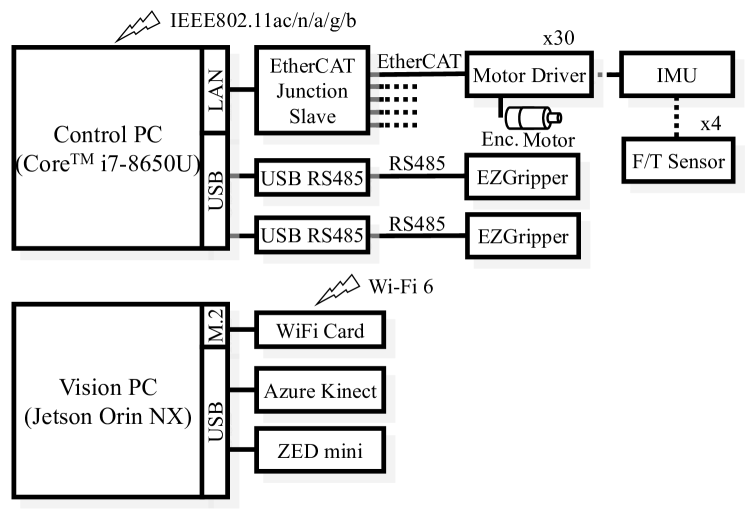
技术框架:该系统的整体架构包含以下几个主要模块:1) 纤薄轻巧的人形机器人RHP Friends,具备移动操作和多接触运动能力;2) 物体检测和跟踪模块,用于感知环境和识别目标物体;3) 遥操作界面,允许人类操作员远程控制机器人;4) 任务规划和控制模块,用于协调自主操作和遥操作,并生成机器人的运动轨迹。
关键创新:该论文的关键创新在于实现了自主操作和遥操作的无缝融合。通过智能的任务规划和控制算法,机器人能够根据任务需求和环境状况,自动选择合适的操作模式,并在自主操作和遥操作之间平滑切换。这种融合方法提高了机器人的灵活性、适应性和可靠性。
关键设计:在遥操作方面,设计了直观的用户界面,允许操作员通过视觉反馈和力反馈来控制机器人的运动。在自主操作方面,采用了基于多接触运动规划的算法,使机器人能够在复杂环境中稳定地进行操作。此外,还设计了安全机制,防止机器人在操作过程中对人类造成伤害。
🖼️ 关键图片
📊 实验亮点
该系统在2023年国际机器人展览会(IREX)上进行了演示,每天三次,持续三天。演示结果表明,RHP Friends机器人能够高效地完成日常的病人转移任务和非日常任务,例如操作断路器。这验证了该系统在实际护理场景中的可行性和有效性,并展示了其在人机协作方面的潜力。
🎯 应用场景
该研究成果可应用于医疗护理、康复辅助、家庭服务等领域。RHP Friends机器人能够协助护士完成病人转移、药物递送、设备操作等任务,减轻医护人员的工作负担,提高护理效率。此外,该技术还可用于远程医疗,使医生能够远程诊断和治疗病人,尤其是在偏远地区或紧急情况下。
📄 摘要(原文)
This paper describes RHP Friends, a social humanoid robot developed to enable assistive robotic deployments in human-coexisting environments. As a use-case application, we present its potential use in nursing by extending its capabilities to operate human devices and tools according to the task and by enabling remote assistance operations. To meet a wide variety of tasks and situations in environments designed by and for humans, we developed a system that seamlessly integrates the slim and lightweight robot and several technologies: locomanipulation, multi-contact motion, teleoperation, and object detection and tracking. We demonstrated the system's usage in a nursing application. The robot efficiently performed the daily task of patient transfer and a non-routine task, represented by a request to operate a circuit breaker. This demonstration, held at the 2023 International Robot Exhibition (IREX), conducted three times a day over three days.