A Predefined-Time Convergent and Noise-Tolerant Zeroing Neural Network Model for Time Variant Quadratic Programming With Application to Robot Motion Planning
作者: Yi Yang, Xuchen Wang, Richard M. Voyles, Xin Ma
分类: cs.RO, cs.NE
发布日期: 2024-12-29
备注: 14 pages, 4 figures; as accepted for publication
DOI: 10.26599/TST.2024.9010202
💡 一句话要点
提出PTC-NT-FOZNN以解决时变二次规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 时变二次规划 归零神经网络 机器人运动规划 抗噪声 分数阶控制 激活函数 动态环境
📋 核心要点
- 现有的归零神经网络在处理时变二次规划时,往往面临收敛速度慢和对噪声敏感的问题。
- 本文提出的PTC-NT-FOZNN模型通过引入新激活函数和时间衰减增益,解决了传统ZNN的不足,提升了收敛性和抗噪声能力。
- 实验结果表明,PTC-NT-FOZNN在位置精度和计算效率上显著优于六种传统ZNN模型,验证了其在机器人运动规划中的有效性。
📝 摘要(中文)
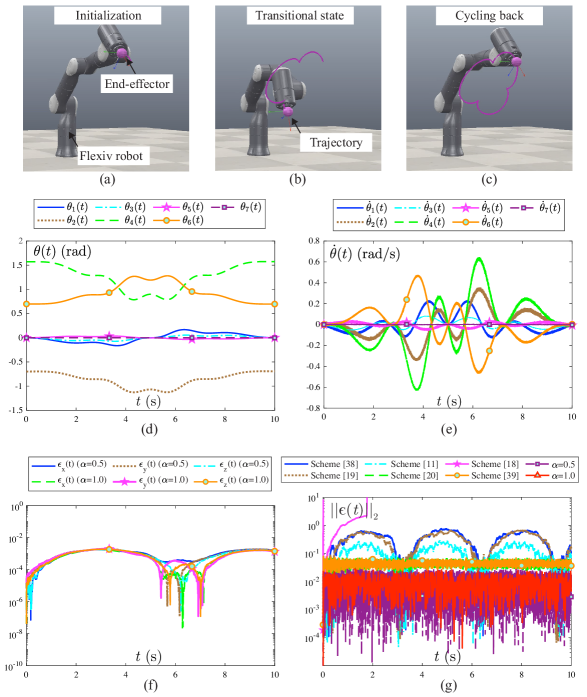
本文开发了一种预定义时间收敛且抗噪声的分数阶归零神经网络模型(PTC-NT-FOZNN),旨在解决时变二次规划(TVQP)问题。PTC-NT-FOZNN源于一种新颖的可变增益归零神经网络(ZNN)迭代,结合了时间衰减增益和抗噪声特性,适用于能效高的机器人运动规划任务。通过引入新开发的激活函数,PTC-NT-FOZNN在模型阶数不影响收敛性的情况下,提升了传统ZNN模型的性能。与六种已建立的ZNN模型相比,PTC-NT-FOZNN在位置精度和抗加性噪声方面表现优越,经过Flexiv Rizon机器人臂的仿真和实验验证,证明了其在精确跟踪和高计算效率方面的有效性,适合用于鲁棒的运动控制应用。
🔬 方法详解
问题定义:本文旨在解决时变二次规划(TVQP)中的收敛速度慢和对噪声敏感的问题。现有的归零神经网络(ZNN)在动态环境下表现不佳,难以满足高精度和高效率的需求。
核心思路:PTC-NT-FOZNN模型通过引入分数阶控制和新型激活函数,结合时间衰减增益,确保在预定义时间内收敛,并增强了对噪声的抵抗能力。这样的设计使得模型在动态和不确定环境中更具适应性。
技术框架:该模型的整体架构包括输入层、分数阶动态模块、激活函数模块和输出层。输入层接收时变数据,动态模块负责状态更新,激活函数模块确保收敛性,输出层提供最终决策。
关键创新:PTC-NT-FOZNN的主要创新在于其新开发的激活函数和时间衰减增益机制,这使得模型在不同阶数下均能实现优良的收敛性,与传统ZNN模型相比,显著提升了性能。
关键设计:模型参数设置为$0 < α 1$,通过调节增益和激活函数,确保在动态环境中保持高效的计算和精确的控制。损失函数设计考虑了位置精度和抗噪声能力的平衡。网络结构上,采用分数阶动态更新机制,增强了模型的灵活性和适应性。
🖼️ 关键图片
📊 实验亮点
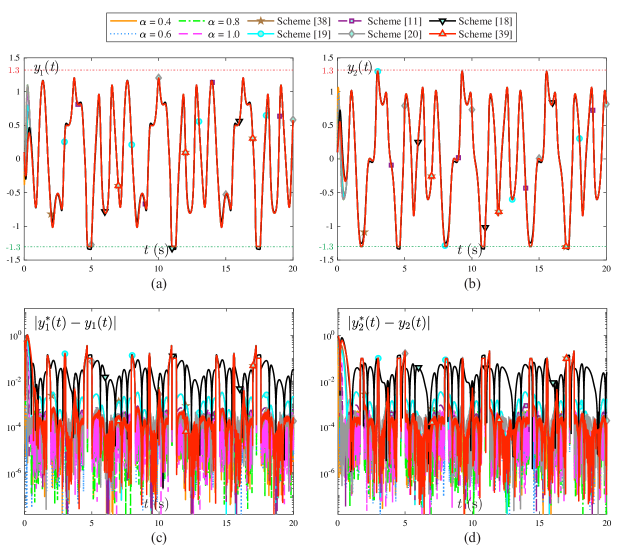
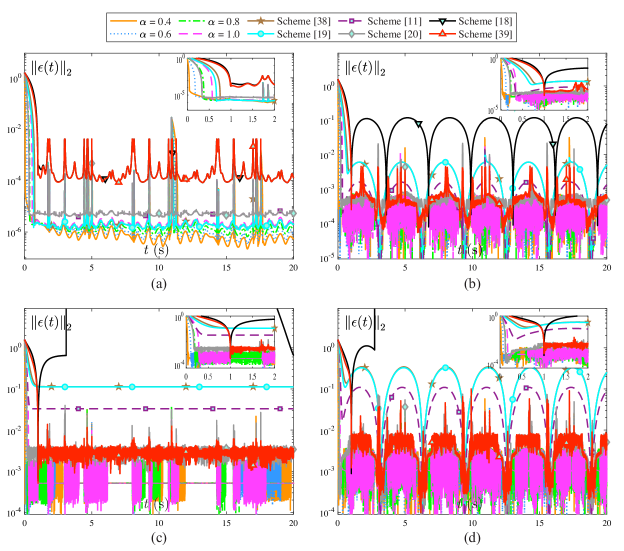
实验结果显示,PTC-NT-FOZNN在位置精度上比六种传统ZNN模型提升了显著的性能,尤其在抗加性噪声方面表现优越,验证了其在复杂环境下的有效性和高效性。
🎯 应用场景
该研究的PTC-NT-FOZNN模型在机器人运动规划领域具有广泛的应用潜力,尤其是在动态和不确定环境下的精确控制任务中。其高效的收敛性和抗噪声能力使其能够在实际应用中提高机器人的操作精度和可靠性,未来可能推动智能机器人技术的发展。
📄 摘要(原文)
This paper develops a predefined-time convergent and noise-tolerant fractional-order zeroing neural network (PTC-NT-FOZNN) model, innovatively engineered to tackle time-variant quadratic programming (TVQP) challenges. The PTC-NT-FOZNN, stemming from a novel iteration within the variable-gain ZNN spectrum, known as FOZNNs, features diminishing gains over time and marries noise resistance with predefined-time convergence, making it ideal for energy-efficient robotic motion planning tasks. The PTC-NT-FOZNN enhances traditional ZNN models by incorporating a newly developed activation function that promotes optimal convergence irrespective of the model's order. When evaluated against six established ZNNs, the PTC-NT-FOZNN, with parameters $0 < α\leq 1$, demonstrates enhanced positional precision and resilience to additive noises, making it exceptionally suitable for TVQP tasks. Thorough practical assessments, including simulations and experiments using a Flexiv Rizon robotic arm, confirm the PTC-NT-FOZNN's capabilities in achieving precise tracking and high computational efficiency, thereby proving its effectiveness for robust kinematic control applications.