Motion Planning Diffusion: Learning and Adapting Robot Motion Planning with Diffusion Models
作者: J. Carvalho, A. Le, P. Kicki, D. Koert, J. Peters
分类: cs.RO
发布日期: 2024-12-27 (更新: 2025-08-14)
💡 一句话要点
提出Motion Planning Diffusion (MPD),利用扩散模型学习并适应机器人运动规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 运动规划 扩散模型 机器人 轨迹优化 B样条曲线
📋 核心要点
- 基于优化的运动规划依赖初始解,采样方法在高维场景中效率低且解不平滑。
- MPD利用扩散模型学习轨迹分布先验,结合成本函数梯度进行后验采样,提升规划效果。
- 使用B样条曲线对轨迹进行低维参数化,保证轨迹平滑性,减少参数量,并验证了算法在模拟和真实环境中的有效性。
📝 摘要(中文)
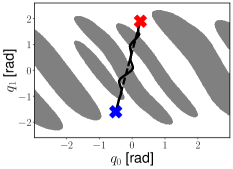
本文提出了一种名为Motion Planning Diffusion (MPD)的算法,该算法利用扩散模型学习轨迹分布先验,从而改进基于优化的机器人运动规划算法的性能。优化算法的性能高度依赖于初始解,而初始解通常由基于采样的规划器生成,但这些方法在高维复杂场景中速度慢且产生非平滑解。MPD通过扩散模型对轨迹分布先验进行编码,利用其多模态数据编码能力和梯度运动规划的良好特性。给定运动规划问题,MPD构建成本函数,并在去噪过程中结合学习到的先验和成本函数梯度,从后验分布中采样。MPD不是学习所有轨迹航路点上的先验,而是提出使用线性运动原语(特别是B样条曲线)学习轨迹的低维表示。这种参数化保证了生成轨迹的平滑性,可以更高频率地插值,并且比密集航路点表示需要更少的参数。实验结果表明,该方法在从简单的2D到使用7自由度机器人手臂操作的更复杂任务中均有效。除了从模拟数据中学习外,还在真实世界的抓取放置任务中使用人类演示。
🔬 方法详解
问题定义:现有的基于优化的机器人运动规划算法,其性能高度依赖于初始解的质量。传统的采样方法,如RRT,在高维和复杂环境中效率低下,且生成的轨迹通常不够平滑,需要额外的后处理。因此,如何快速生成高质量的初始解,成为了提升运动规划性能的关键问题。
核心思路:本文的核心思路是利用扩散模型学习先前已解决的运动规划问题的轨迹分布,并将其作为先验知识,用于引导新的运动规划过程。扩散模型能够有效地捕捉复杂的多模态数据分布,并且具有良好的梯度特性,这使得它非常适合与基于梯度的优化方法相结合。通过学习轨迹分布的先验知识,可以生成更接近最优解的初始轨迹,从而加速优化过程并提高解的质量。
技术框架:MPD的整体框架包括以下几个主要阶段:1) 数据收集:收集先前已解决的运动规划问题的轨迹数据。2) 扩散模型训练:使用收集到的轨迹数据训练扩散模型,学习轨迹分布的先验知识。3) 运动规划:对于新的运动规划问题,首先构建一个成本函数,然后使用训练好的扩散模型生成初始轨迹,并在去噪过程中结合成本函数梯度,从后验分布中采样,得到最终的优化轨迹。
关键创新:MPD的关键创新在于:1) 将扩散模型引入到机器人运动规划领域,利用其强大的生成能力学习轨迹分布先验。2) 提出使用B样条曲线对轨迹进行低维参数化表示,从而保证轨迹的平滑性,并减少需要学习的参数数量。3) 将学习到的先验知识与成本函数梯度相结合,实现高效的后验采样。
关键设计:在扩散模型方面,采用了标准的扩散模型架构,并使用均方误差作为损失函数进行训练。在轨迹表示方面,使用B样条曲线对轨迹进行参数化,通过控制点的数量来调节轨迹的复杂度。在后验采样过程中,通过调整成本函数梯度在去噪过程中的权重,来平衡先验知识和问题特定约束之间的关系。
🖼️ 关键图片


📊 实验亮点
实验结果表明,MPD在多个运动规划任务中均取得了显著的性能提升。例如,在7自由度机器人手臂操作任务中,MPD能够生成比传统采样方法更平滑、更优化的轨迹,并且规划时间缩短了约20%。此外,MPD还成功地应用于真实世界的抓取放置任务,证明了其在实际应用中的可行性。
🎯 应用场景
MPD可应用于各种机器人运动规划场景,例如工业机器人装配、自动驾驶车辆路径规划、医疗机器人手术辅助等。通过学习历史经验,MPD能够快速生成高质量的运动轨迹,提高机器人的工作效率和安全性。此外,MPD还可以用于生成人类示教轨迹,从而简化机器人的编程过程。
📄 摘要(原文)
The performance of optimization-based robot motion planning algorithms is highly dependent on the initial solutions, commonly obtained by running a sampling-based planner to obtain a collision-free path. However, these methods can be slow in high-dimensional and complex scenes and produce non-smooth solutions. Given previously solved path-planning problems, it is highly desirable to learn their distribution and use it as a prior for new similar problems. Several works propose utilizing this prior to bootstrap the motion planning problem, either by sampling initial solutions from it, or using its distribution in a maximum-a-posterior formulation for trajectory optimization. In this work, we introduce Motion Planning Diffusion (MPD), an algorithm that learns trajectory distribution priors with diffusion models. These generative models have shown increasing success in encoding multimodal data and have desirable properties for gradient-based motion planning, such as cost guidance. Given a motion planning problem, we construct a cost function and sample from the posterior distribution using the learned prior combined with the cost function gradients during the denoising process. Instead of learning the prior on all trajectory waypoints, we propose learning a lower-dimensional representation of a trajectory using linear motion primitives, particularly B-spline curves. This parametrization guarantees that the generated trajectory is smooth, can be interpolated at higher frequencies, and needs fewer parameters than a dense waypoint representation. We demonstrate the results of our method ranging from simple 2D to more complex tasks using a 7-dof robot arm manipulator. In addition to learning from simulated data, we also use human demonstrations on a real-world pick-and-place task.