RobotDiffuse: Diffusion-Based Motion Planning for Redundant Manipulators with the ROP Obstacle Avoidance Dataset
作者: Xudong Mou, Xiaohan Zhang, Tiejun Wang, Tianyu Wo, Cangbai Xu, Ningbo Gu, Rui Wang, Xudong Liu
分类: cs.RO, cs.LG
发布日期: 2024-12-27 (更新: 2026-01-06)
🔗 代码/项目: GITHUB
💡 一句话要点
RobotDiffuse:基于扩散模型的冗余机械臂运动规划,并提出ROP数据集
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 冗余机械臂 扩散模型 Transformer 深度学习
📋 核心要点
- 传统运动规划算法难以应对冗余机械臂高自由度带来的挑战,深度学习方法又存在不稳定和效率低下的问题。
- RobotDiffuse的核心思想是利用扩散模型生成平滑连贯的运动轨迹,并结合物理约束和Transformer结构来提高规划质量。
- 实验结果表明,RobotDiffuse在复杂模拟环境中表现出色,并发布了包含大量机器人姿态和避障场景的ROP数据集。
📝 摘要(中文)
本文提出了一种基于扩散模型的冗余机械臂运动规划方法RobotDiffuse。冗余机械臂具有更高的自由度,在制造、外科机器人和人机协作等领域具有广泛的应用前景。然而,由于自由度增加和复杂动态环境,其运动规划面临挑战。传统算法在高维空间中表现不佳,而基于深度学习的方法在复杂任务中常不稳定且效率低下。RobotDiffuse通过整合物理约束与点云编码器,并用仅编码器Transformer替换U-Net结构,从而提升模型捕获时间依赖性的能力,生成更平滑、连贯的运动规划。论文使用复杂模拟器验证了该方法,并发布了一个新的数据集Robot-obtalcles-panda (ROP),包含3500万个机器人姿态和14万个避障场景。实验结果表明RobotDiffuse的有效性,并展示了扩散模型在运动规划任务中的潜力。
🔬 方法详解
问题定义:论文旨在解决冗余机械臂在复杂动态环境中运动规划的问题。现有方法,如传统运动规划算法(如RRT、PRM)在高维空间中计算复杂度高,难以实时规划;基于深度学习的方法,如模仿学习、强化学习,在复杂任务中训练不稳定,泛化能力差。这些方法难以生成平滑、连贯且满足物理约束的运动轨迹。
核心思路:论文的核心思路是利用扩散模型生成运动轨迹。扩散模型通过逐步添加噪声将数据分布转化为高斯分布,然后通过逆过程从高斯分布中采样生成新的数据。这种生成方式能够产生多样且平滑的轨迹,并且可以通过控制噪声水平来调节轨迹的探索性。此外,结合物理约束可以保证生成的轨迹是可行的。
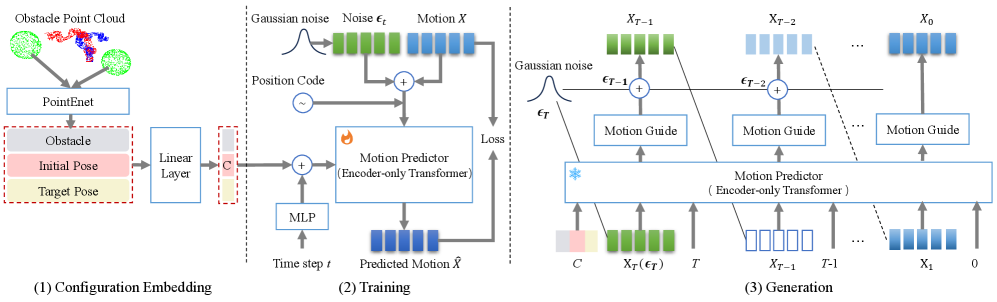
技术框架:RobotDiffuse的整体框架包括以下几个主要模块:1) 点云编码器:用于提取环境障碍物的特征表示;2) 扩散模型:基于Transformer的扩散模型,用于生成机械臂的运动轨迹;3) 物理约束:用于保证生成的轨迹满足机械臂的运动学和动力学约束。整个流程是:首先,点云编码器将环境信息编码成特征向量;然后,扩散模型以该特征向量为条件,逐步生成机械臂的运动轨迹;最后,物理约束模块对生成的轨迹进行验证和修正。
关键创新:论文的关键创新在于:1) 将扩散模型应用于冗余机械臂的运动规划;2) 使用Transformer结构替代传统的U-Net结构,以更好地捕获时间依赖性;3) 提出了ROP数据集,为相关研究提供了benchmark。与现有方法的本质区别在于,RobotDiffuse是一种生成式方法,可以直接生成满足约束的运动轨迹,而不需要像传统方法那样进行搜索或优化。
关键设计:在扩散模型中,论文使用encoder-only Transformer来建模时间序列数据,这比传统的U-Net结构更适合处理运动规划中的时间依赖性。损失函数包括扩散模型的重建损失和物理约束损失。物理约束损失用于惩罚违反运动学和动力学约束的轨迹。在ROP数据集中,论文生成了大量的随机场景,并对每个场景进行了运动规划,从而获得了大量的机器人姿态和避障场景。
🖼️ 关键图片


📊 实验亮点
论文在复杂模拟环境中验证了RobotDiffuse的有效性。实验结果表明,RobotDiffuse能够生成平滑、连贯且满足物理约束的运动轨迹。此外,RobotDiffuse在ROP数据集上取得了最高的整体评分,证明了其优越的性能。ROP数据集的发布也为相关研究提供了重要的资源。
🎯 应用场景
RobotDiffuse具有广泛的应用前景,包括:1) 工业自动化:可用于机器人装配、焊接、喷涂等任务,提高生产效率和质量;2) 外科机器人:可用于辅助医生进行手术,提高手术精度和安全性;3) 人机协作:可用于实现人与机器人之间的安全协作,提高工作效率和舒适性。该研究的实际价值在于提供了一种新的运动规划方法,可以解决传统方法难以处理的复杂场景。未来影响在于推动机器人技术的进步,促进机器人在各个领域的应用。
📄 摘要(原文)
Redundant manipulators, with their higher Degrees of Freedom (DoFs), offer enhanced kinematic performance and versatility, making them suitable for applications like manufacturing, surgical robotics, and human-robot collaboration. However, motion planning for these manipulators is challenging due to increased DoFs and complex, dynamic environments. While traditional motion planning algorithms struggle with high-dimensional spaces, deep learning-based methods often face instability and inefficiency in complex tasks. This paper introduces RobotDiffuse, a diffusion model-based approach for motion planning in redundant manipulators. By integrating physical constraints with a point cloud encoder and replacing the U-Net structure with an encoder-only transformer, RobotDiffuse improves the model's ability to capture temporal dependencies and generate smoother, more coherent motion plans. We validate the approach using a complex simulator and release a new dataset, Robot-obtalcles-panda (ROP), with 35M robot poses and 0.14M obstacle avoidance scenarios. The highest overall score obtained in the experiment demonstrates the effectiveness of RobotDiffuse and the promise of diffusion models for motion planning tasks. The dataset can be accessed at https://github.com/ACRoboT-buaa/RobotDiffuse.