Goal State Generation for Robotic Manipulation Based on Linguistically Guided Hybrid Gaussian Diffusion
作者: Yichen Xu, Faliang Chang, Chunsheng Liu, Dexin Wang
分类: cs.RO
发布日期: 2024-12-25
💡 一句话要点
提出基于语言引导混合高斯扩散的机器人操作目标状态生成方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人操作 目标状态生成 语言引导 高斯扩散模型 点云处理
📋 核心要点
- 现有机器人操作方法在生成目标状态时缺乏对生成位置的精确控制,难以满足复杂约束条件。
- 论文提出一种语言引导混合高斯扩散网络(LHGD),结合重力覆盖系数细化,生成更精确的目标状态。
- 实验表明,该方法在多种操作任务中成功率最高,并显著减少点云重叠,简化后续运动规划。
📝 摘要(中文)
在机器人操作任务中,为操作对象生成指定的目标状态对于机器人手臂的运动规划至关重要。例如,在挂杯子任务中,杯子必须位于挂钩周围的可行区域内。虽然现有方法可以生成多个可行的杯子目标状态,但这些状态通常是随机生成的,缺乏对生成位置的控制。这使得这些方法在存在约束(例如,挂钩已被其他杯子占用或必须满足特定操作目标)的情况下效果不佳。此外,由于杯子和架子之间频繁的物理交互,端到端模型生成的不精确目标状态通常会导致点云重叠,从而对后续的机器人手臂运动规划产生不利影响。为了解决这些挑战,我们提出了一种语言引导混合高斯扩散(LHGD)网络,用于生成操作目标状态,并结合基于重力覆盖系数的方法来细化目标状态。为了在语言指定的分布设置下评估我们的方法,我们收集了10种杯子在5种不同架子上10个不同挂钩上的多个可行目标状态。此外,我们准备了五种未见过的杯子设计用于验证。实验结果表明,我们的方法在单模、多模和语言指定的分布操作任务中均实现了最高的成功率。此外,它显著减少了点云重叠,直接生成无碰撞的目标状态,从而消除了机器人手臂的额外避障操作。
🔬 方法详解
问题定义:论文旨在解决机器人操作中目标状态生成的问题,特别是当存在语言描述的约束或环境限制时,现有方法无法精确控制目标状态的生成位置,导致生成的目标状态可能存在碰撞或不满足任务要求。现有端到端模型生成的目标状态点云重叠问题,增加了后续机器人手臂运动规划的难度。
核心思路:论文的核心思路是利用语言信息引导高斯扩散模型生成目标状态。通过结合语言描述,模型可以学习到不同约束条件下的目标状态分布,从而生成更符合任务需求的目标状态。此外,使用重力覆盖系数来细化生成的目标状态,减少点云重叠,确保生成的目标状态是无碰撞的。
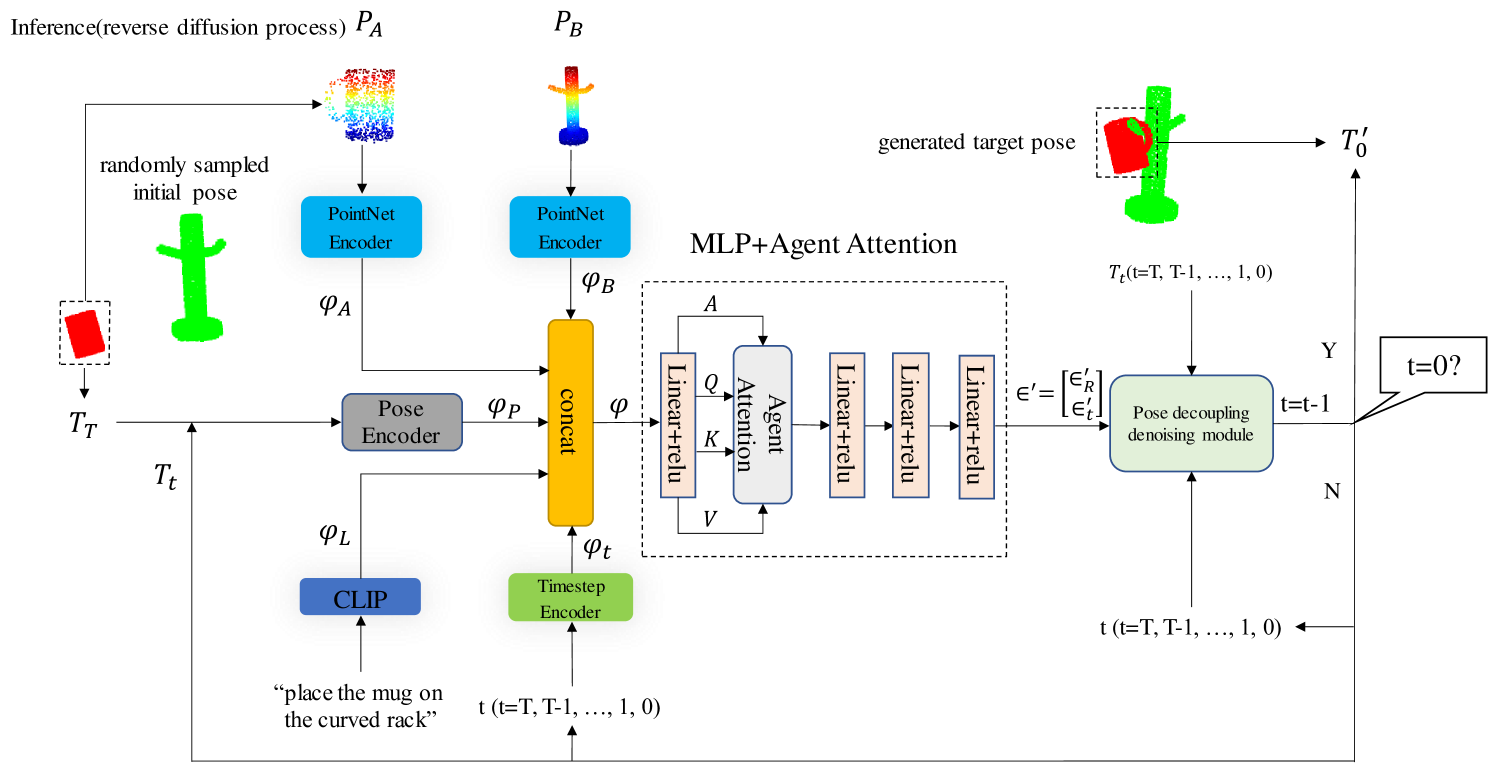
技术框架:该方法主要包含两个阶段:1) 使用语言引导混合高斯扩散网络(LHGD)生成初始目标状态;2) 使用基于重力覆盖系数的方法细化目标状态。LHGD网络以语言描述作为输入,通过扩散过程生成目标状态的点云。细化阶段通过优化重力覆盖系数,调整点云的位置和姿态,减少点云重叠。
关键创新:该方法的主要创新点在于:1) 提出了语言引导的高斯扩散模型,能够根据语言描述生成符合约束条件的目标状态;2) 引入了重力覆盖系数来细化目标状态,有效减少了点云重叠,提高了目标状态的质量。
关键设计:LHGD网络采用混合高斯模型作为扩散过程的基础,通过语言编码器将语言描述转换为向量表示,并将其作为扩散过程的条件。重力覆盖系数的计算基于目标物体和周围环境的几何信息,通过优化算法调整目标物体的位置和姿态,使得重力覆盖系数最大化,从而减少点云重叠。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在单模、多模和语言指定的分布操作任务中均实现了最高的成功率。与现有方法相比,该方法显著减少了点云重叠,直接生成无碰撞的目标状态,从而消除了机器人手臂的额外避障操作。在未见过的杯子设计上的验证也表明了该方法的泛化能力。
🎯 应用场景
该研究成果可应用于各种机器人操作任务,例如装配、抓取、放置等。特别是在需要精确控制目标状态或存在复杂约束条件的应用场景中,该方法具有显著优势。例如,在智能仓储中,机器人可以根据订单信息,将货物放置到指定位置,并避免与其他货物发生碰撞。该研究还有助于提高机器人操作的自动化程度和智能化水平。
📄 摘要(原文)
In robotic manipulation tasks, achieving a designated target state for the manipulated object is often essential to facilitate motion planning for robotic arms. Specifically, in tasks such as hanging a mug, the mug must be positioned within a feasible region around the hook. Previous approaches have enabled the generation of multiple feasible target states for mugs; however, these target states are typically generated randomly, lacking control over the specific generation locations. This limitation makes such methods less effective in scenarios where constraints exist, such as hooks already occupied by other mugs or when specific operational objectives must be met. Moreover, due to the frequent physical interactions between the mug and the rack in real-world hanging scenarios, imprecisely generated target states from end-to-end models often result in overlapping point clouds. This overlap adversely impacts subsequent motion planning for the robotic arm. To address these challenges, we propose a Linguistically Guided Hybrid Gaussian Diffusion (LHGD) network for generating manipulation target states, combined with a gravity coverage coefficient-based method for target state refinement. To evaluate our approach under a language-specified distribution setting, we collected multiple feasible target states for 10 types of mugs across 5 different racks with 10 distinct hooks. Additionally, we prepared five unseen mug designs for validation purposes. Experimental results demonstrate that our method achieves the highest success rates across single-mode, multi-mode, and language-specified distribution manipulation tasks. Furthermore, it significantly reduces point cloud overlap, directly producing collision-free target states and eliminating the need for additional obstacle avoidance operations by the robotic arm.