Gradient-based Trajectory Optimization with Parallelized Differentiable Traffic Simulation
作者: Sanghyun Son, Laura Zheng, Brian Clipp, Connor Greenwell, Sujin Philip, Ming C. Lin
分类: cs.RO, cs.DC, cs.LG
发布日期: 2024-12-21 (更新: 2025-02-18)
备注: 9 pages, 6 figures, 3 tables
🔗 代码/项目: GITHUB
💡 一句话要点
提出基于梯度优化的并行化可微交通仿真,用于轨迹优化。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 交通仿真 可微编程 轨迹优化 智能驾驶员模型 并行计算
📋 核心要点
- 现有交通仿真难以兼顾大规模和可微性,限制了基于梯度优化的轨迹规划应用。
- 利用可微的智能驾驶员模型(IDM)构建并行化交通仿真器,实现高效且可微的轨迹生成。
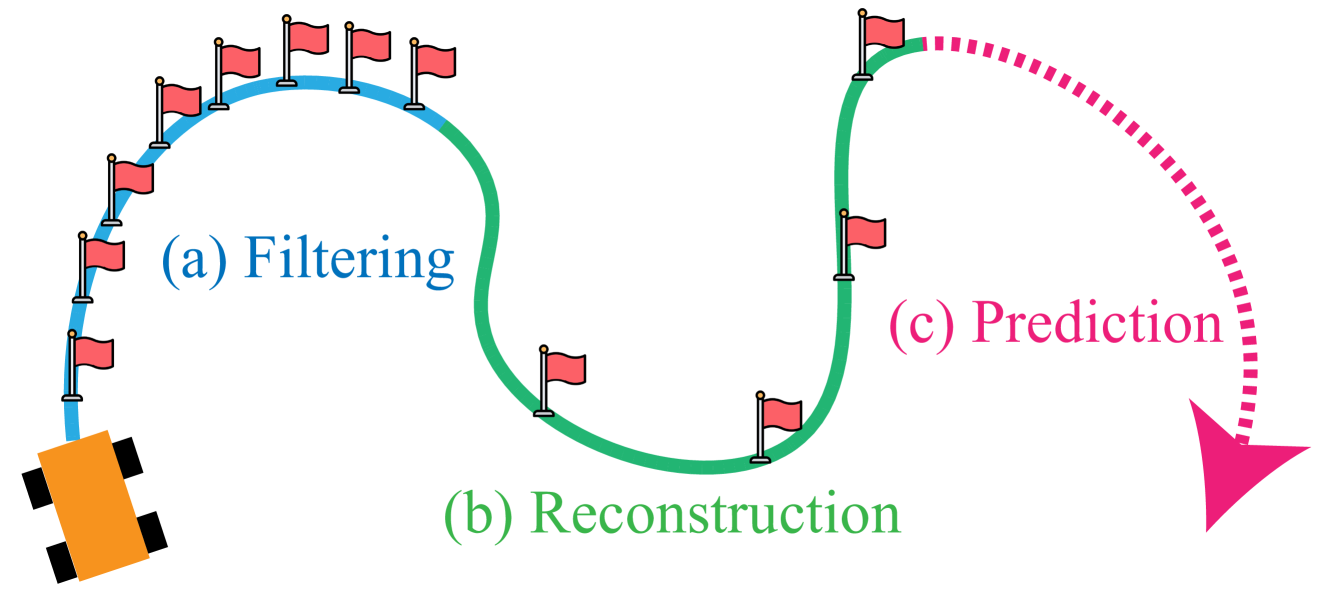
- 实验证明该模拟器可用于轨迹滤波、轨迹重建和轨迹预测,并在真实数据集上验证了其有效性。
📝 摘要(中文)
本文提出了一种基于智能驾驶员模型(IDM)的并行化可微交通模拟器,该模型将驾驶员行为作为关键变量。我们的车辆模拟器能够高效地建模车辆运动,生成可被监督以拟合真实世界数据的轨迹。通过利用其可微性,IDM参数可以使用基于梯度的方法进行优化。该系统能够实时模拟多达200万辆车辆,可扩展用于大规模轨迹优化。我们展示了该模拟器可用于过滤输入轨迹中的噪声(轨迹过滤)、从稀疏轨迹重建密集轨迹(轨迹重建)以及预测未来轨迹(轨迹预测),并且所有生成的轨迹都符合物理定律。我们在包括NGSIM和Waymo开放数据集在内的多个数据集上验证了我们的模拟器和算法。
🔬 方法详解
问题定义:论文旨在解决大规模交通场景下的轨迹优化问题。现有交通仿真方法通常难以同时满足大规模和可微性的要求。传统方法要么计算效率低,无法处理大规模场景;要么不可微,无法使用基于梯度的方法进行优化,从而限制了其在轨迹规划和预测等领域的应用。
核心思路:论文的核心思路是构建一个并行化的、可微的交通仿真器。通过使用可微的智能驾驶员模型(IDM)来模拟车辆行为,并利用并行计算技术提高仿真效率,从而实现大规模场景下的轨迹优化。可微性使得可以使用梯度下降等优化算法来调整IDM参数,从而生成更符合实际交通状况的轨迹。
技术框架:该交通仿真器的整体框架包括以下几个主要模块:1) 基于IDM的车辆运动模型:使用IDM模型来描述车辆的加速和减速行为,该模型考虑了车辆之间的距离、速度差等因素。2) 并行化仿真引擎:利用并行计算技术,例如CUDA,来加速仿真过程,从而实现大规模场景的实时模拟。3) 梯度计算模块:通过自动微分技术,计算仿真器输出(例如车辆轨迹)对IDM参数的梯度。4) 优化算法:使用梯度下降等优化算法,根据梯度信息调整IDM参数,从而优化车辆轨迹。
关键创新:该论文的关键创新在于构建了一个并行化的、可微的交通仿真器。传统交通仿真器通常是不可微的,这限制了其在基于梯度优化的轨迹规划和预测等领域的应用。通过使用可微的IDM模型和并行计算技术,该论文提出的仿真器能够高效地模拟大规模交通场景,并计算仿真器输出对模型参数的梯度,从而可以使用梯度下降等优化算法来优化车辆轨迹。
关键设计:IDM模型是关键,其参数包括最大加速度、舒适减速度、最小车头时距、期望速度等。损失函数的设计取决于具体的应用场景,例如,在轨迹滤波中,可以使用重建轨迹与原始轨迹之间的均方误差作为损失函数;在轨迹预测中,可以使用预测轨迹与真实轨迹之间的均方误差作为损失函数。并行化仿真引擎使用了CUDA等技术,以充分利用GPU的计算能力。
🖼️ 关键图片
📊 实验亮点
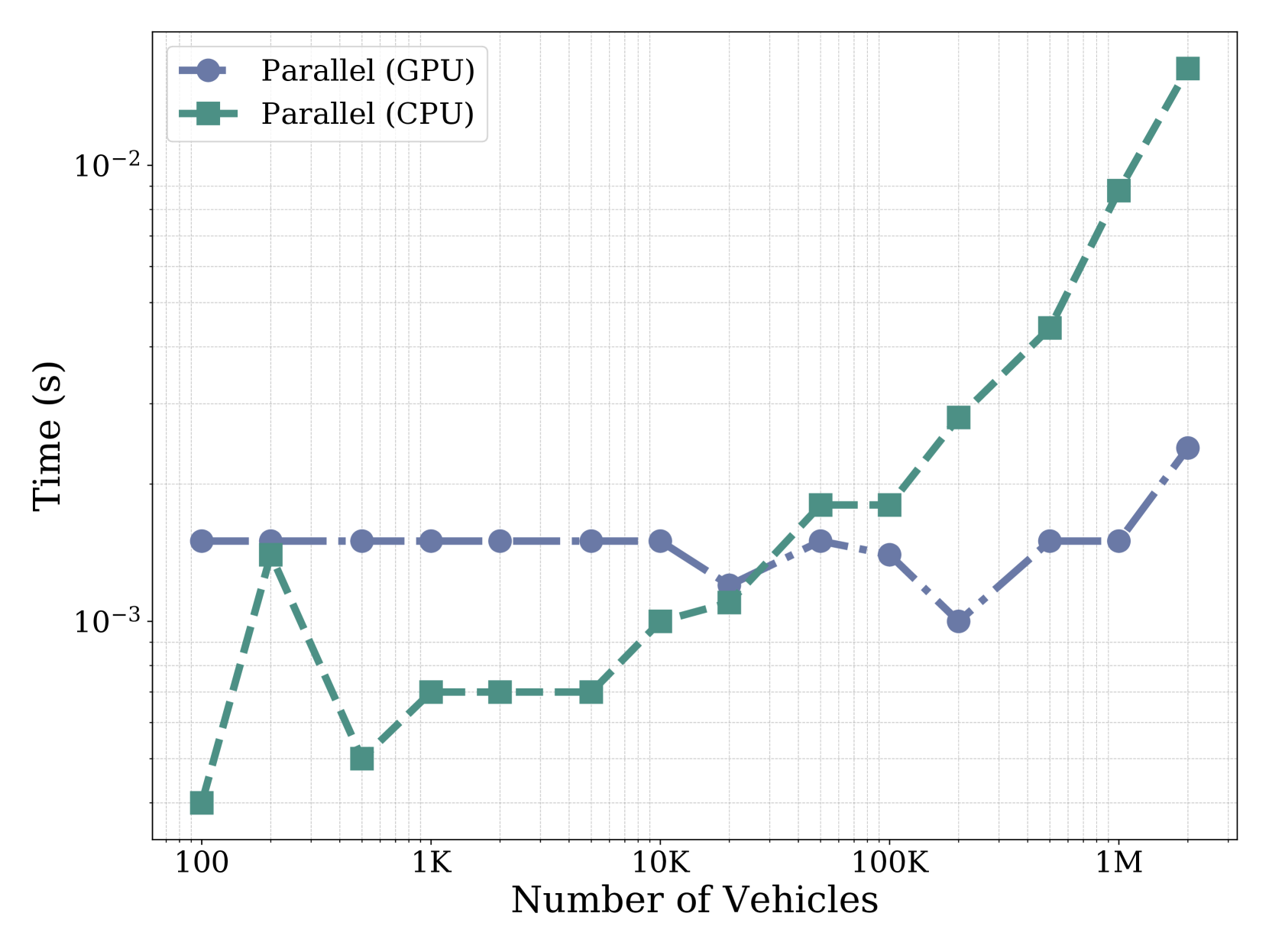
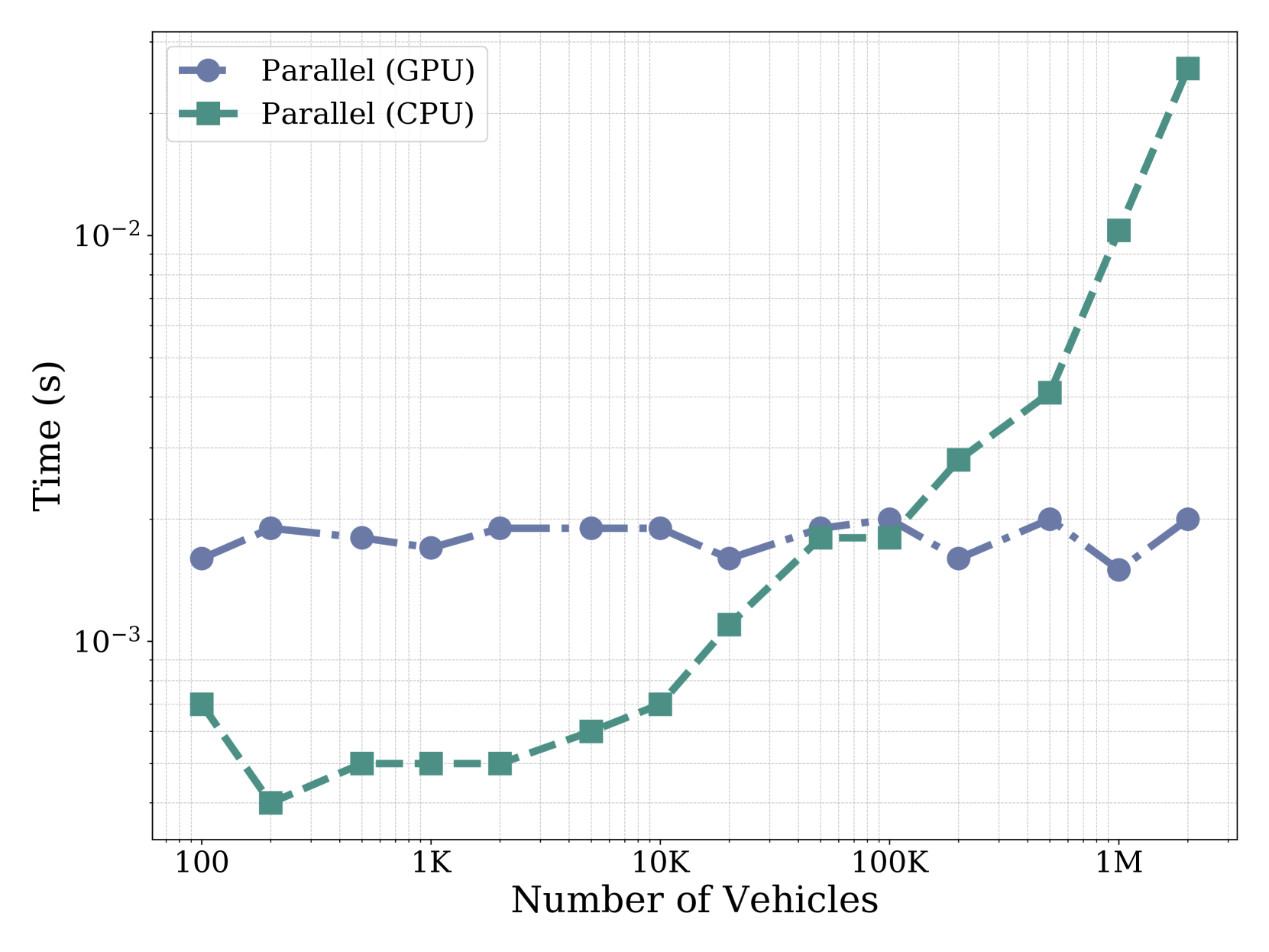
该模拟器能够实时模拟多达200万辆车辆,并在NGSIM和Waymo开放数据集上进行了验证。实验结果表明,该模拟器可以有效地过滤输入轨迹中的噪声,从稀疏轨迹重建密集轨迹,并预测未来轨迹,且生成的轨迹符合物理定律。具体性能数据和对比基线在论文中有详细描述。
🎯 应用场景
该研究成果可广泛应用于自动驾驶、智能交通管理等领域。例如,可以用于自动驾驶车辆的轨迹规划,使其能够更好地适应复杂的交通环境;也可以用于交通流量预测和优化,从而提高交通效率和安全性。此外,该模拟器还可以用于评估不同的交通管理策略的效果。
📄 摘要(原文)
We present a parallelized differentiable traffic simulator based on the Intelligent Driver Model (IDM), a car-following framework that incorporates driver behavior as key variables. Our vehicle simulator efficiently models vehicle motion, generating trajectories that can be supervised to fit real-world data. By leveraging its differentiable nature, IDM parameters are optimized using gradient-based methods. With the capability to simulate up to 2 million vehicles in real time, the system is scalable for large-scale trajectory optimization. We show that we can use the simulator to filter noise in the input trajectories (trajectory filtering), reconstruct dense trajectories from sparse ones (trajectory reconstruction), and predict future trajectories (trajectory prediction), with all generated trajectories adhering to physical laws. We validate our simulator and algorithm on several datasets including NGSIM and Waymo Open Dataset. The code is publicly available at: https://github.com/SonSang/diffidm.