Safe Dynamic Motion Generation in Configuration Space Using Differentiable Distance Fields
作者: Xuemin Chi, Yiming Li, Jihao Huang, Bolun Dai, Zhitao Liu, Sylvain Calinon
分类: cs.RO
发布日期: 2024-12-21
备注: 8 pages, 5 figures
💡 一句话要点
提出基于可微距离场的安全动态运动生成方法,解决高维机器人实时避障问题。
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 机器人运动规划 控制屏障函数 可微距离场 动态避障 时变控制 二次规划 全身接触运动
📋 核心要点
- 现有高维机器人运动生成方法依赖位置信息,忽略速度等高阶导数,导致避障性能下降和安全约束不足。
- 利用可微距离场构建时变CBF,将物体位置和速度信息映射到机器人关节空间,实现更精确的碰撞避免。
- 通过仿真和真实机器人实验,验证了所提方法在动态避障和全身接触运动中的有效性,优于现有方法。
📝 摘要(中文)
本文针对高维机器人动态环境中实时生成无碰撞运动的难题,提出了一种新的解决方案。现有基于控制屏障函数(CBF)的方法在高维机器人操作中依赖位置信息,忽略了速度等高阶导数,导致成功率降低、性能下降和安全约束不足。为了解决这个问题,本文构建了考虑障碍物速度条件的时变CBF(TVCBF)。该方法利用可微距离场,将物体的位置和速度映射到机器人的关节空间,从而全面理解系统的交互。此外,引入时变控制李雅普诺夫函数(TVCLF)以实现全身接触运动。该方法将TVCBF、TVCLF和机器人物理约束集成到一个统一的QP框架中。通过仿真和与最先进方法的比较,验证了该方法在7轴Franka机器人上的有效性。
🔬 方法详解
问题定义:论文旨在解决高维机器人(如7轴Franka机器人)在动态环境中安全、实时地生成无碰撞运动轨迹的问题。现有基于CBF的方法主要依赖位置信息,忽略了速度等高阶导数,这在高维空间中会导致次优的避障性能,甚至可能出现碰撞,尤其是在障碍物快速移动时。此外,现有方法难以处理全身接触运动。
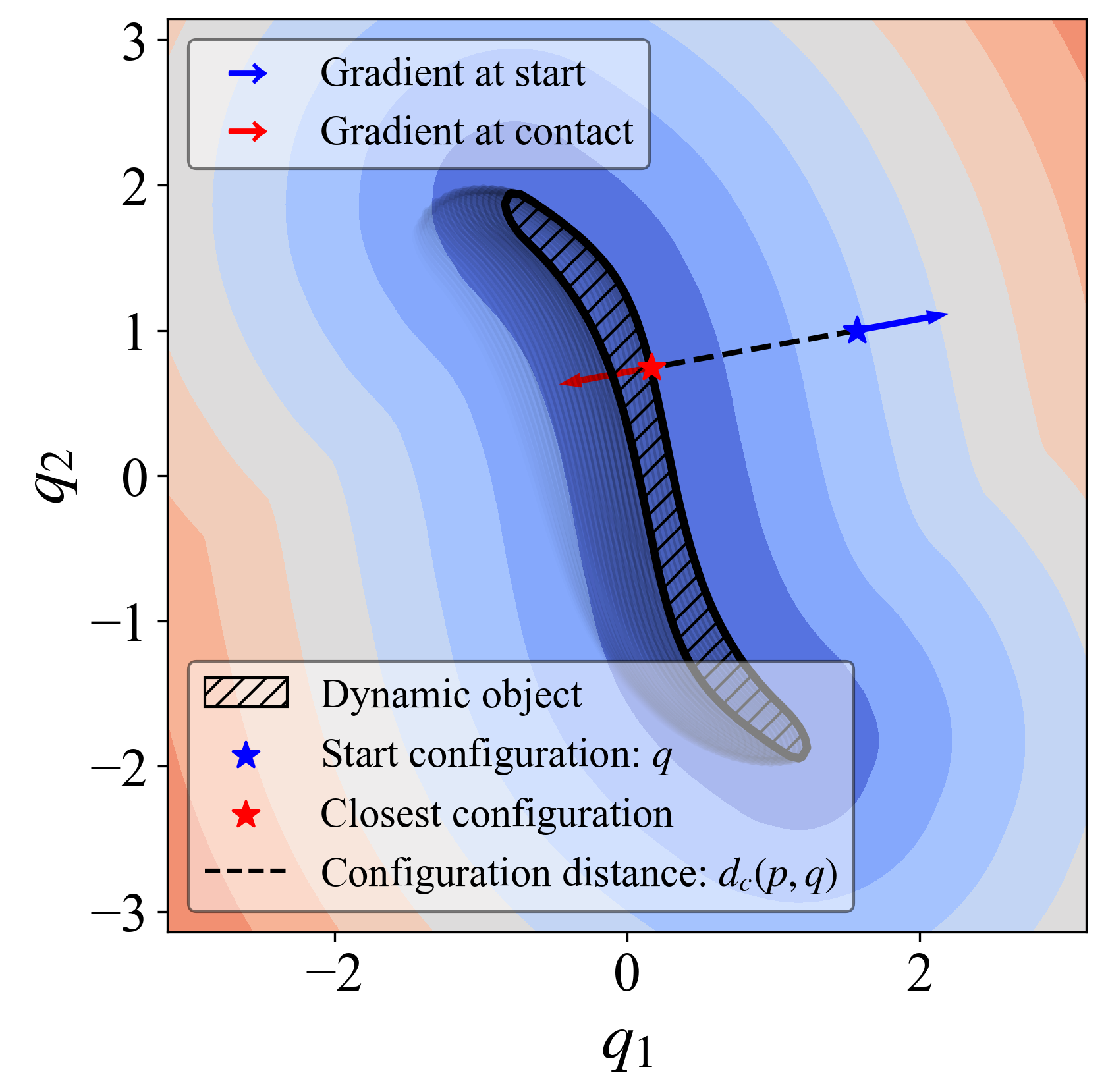
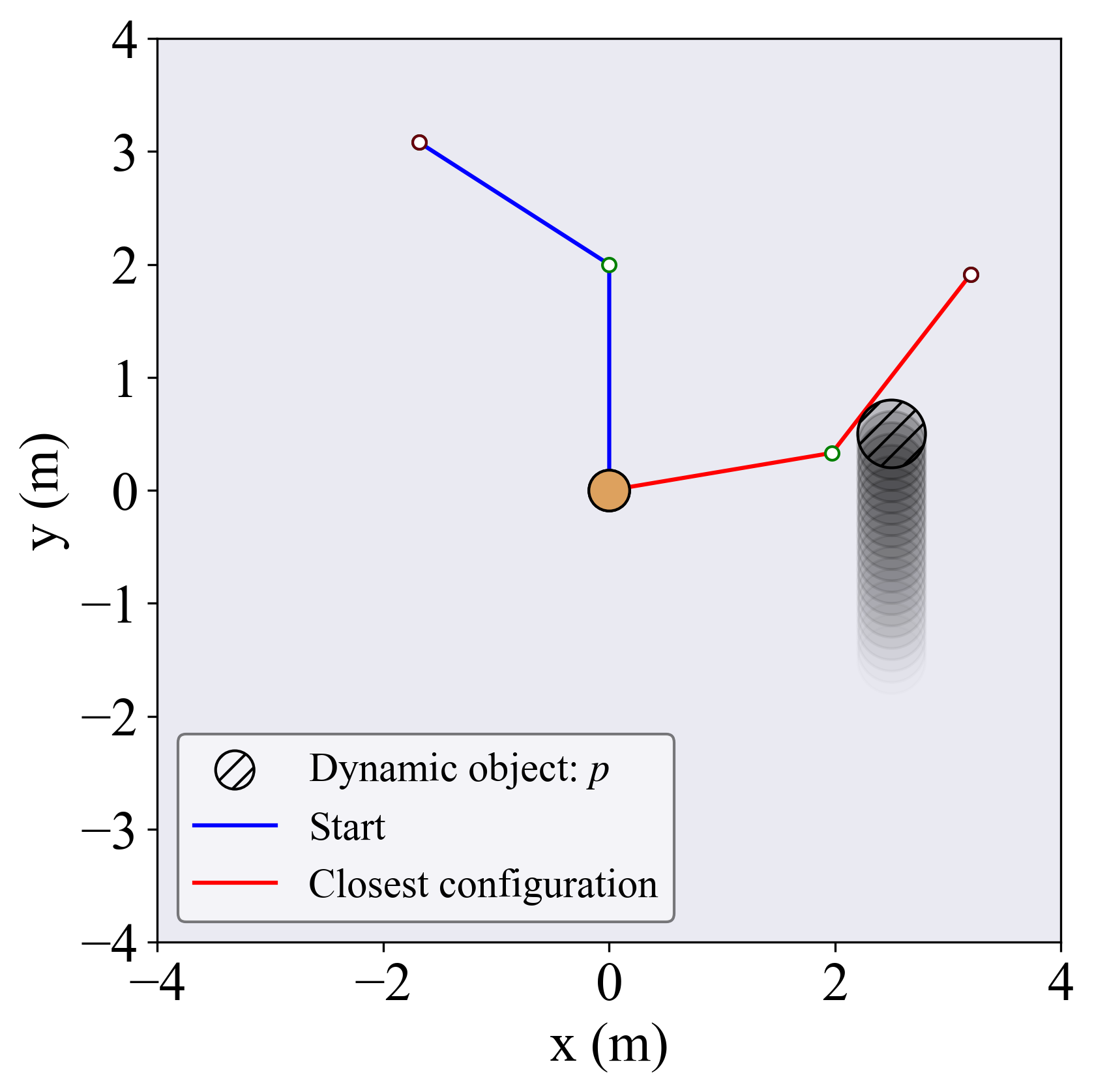
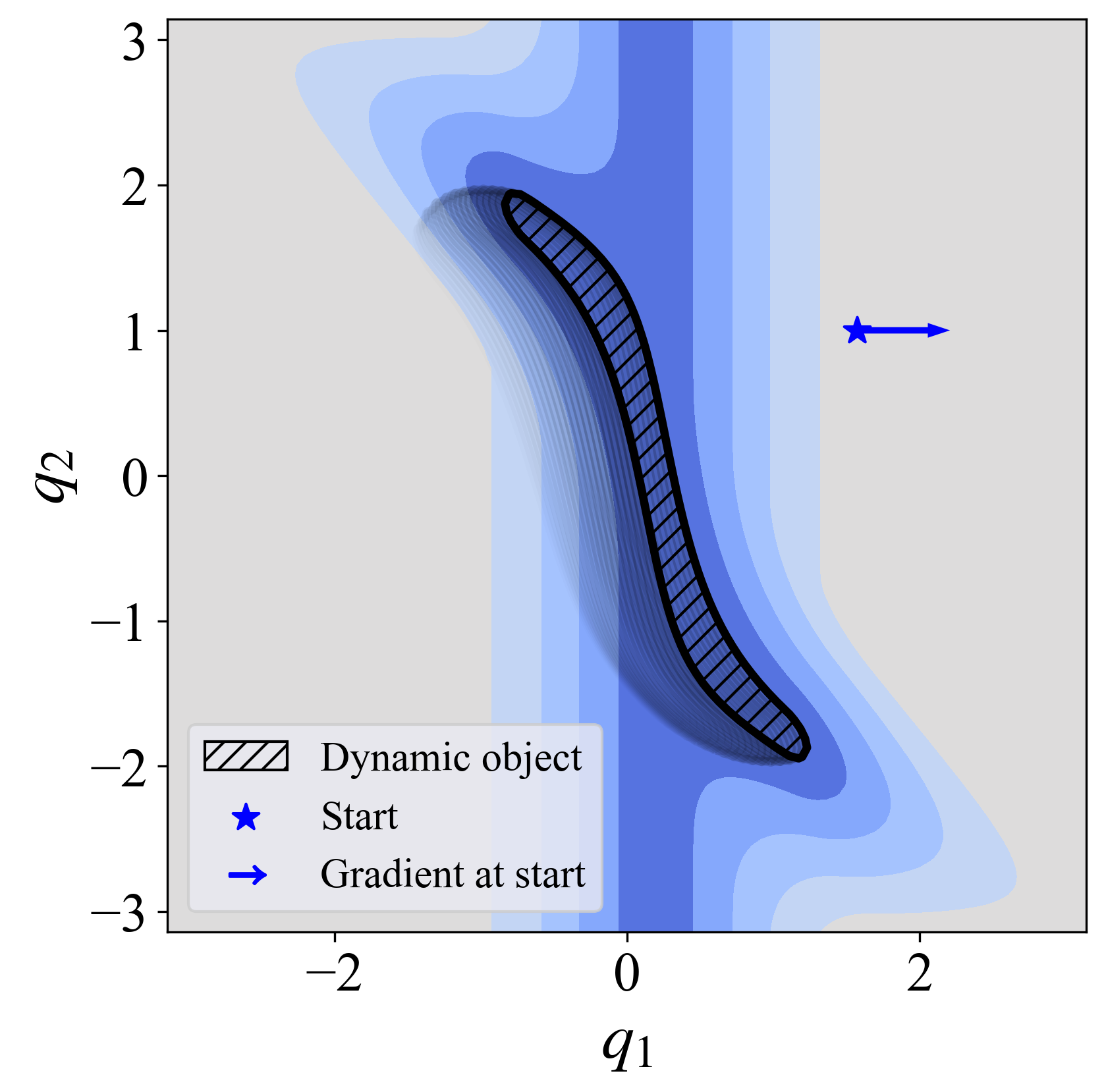
核心思路:论文的核心思路是利用可微距离场(Differentiable Distance Fields)将障碍物的位置和速度信息映射到机器人的关节空间,从而构建考虑速度条件的时变控制屏障函数(TVCBF)。通过将机器人视为点质量系统,简化了运动生成任务。同时,引入时变控制李雅普诺夫函数(TVCLF)来处理全身接触运动,保证任务完成。
技术框架:整体框架包含以下几个主要模块:1) 使用可微距离场计算机器人与障碍物之间的距离和距离梯度,并将障碍物的位置和速度信息映射到关节空间。2) 构建基于速度条件的TVCBF,确保机器人运动的安全性。3) 构建TVCLF,用于引导机器人完成特定任务,例如全身接触运动。4) 将TVCBF、TVCLF和机器人物理约束集成到一个二次规划(QP)框架中,求解最优的控制输入。
关键创新:论文的关键创新在于:1) 将可微距离场应用于机器人运动规划,实现了对障碍物位置和速度信息的有效利用。2) 提出了基于速度条件的TVCBF,提高了动态环境下的避障性能和安全性。3) 结合TVCLF,实现了全身接触运动的规划。
关键设计:可微距离场采用神经网络进行参数化,通过训练学习机器人与环境之间的距离函数。TVCBF的设计考虑了障碍物的速度,使得安全约束更加严格。TVCLF的设计则保证了任务的完成,例如保持与环境的接触。QP框架的目标函数通常是最小化控制输入的变化,约束条件包括TVCBF、TVCLF和机器人的物理限制(如关节速度和力矩限制)。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在动态环境中能够有效地避免碰撞,并且能够实现全身接触运动。与现有方法相比,该方法在避障成功率、运动平滑性和任务完成度方面均有显著提升。在7轴Franka机器人上的实验验证了该方法在真实环境中的可行性和有效性。
🎯 应用场景
该研究成果可应用于各种需要高维机器人安全、实时运动规划的场景,例如:工业自动化中的装配、焊接、喷涂等任务,服务机器人中的物体抓取、搬运等任务,以及医疗机器人中的手术辅助等任务。该方法能够提高机器人的自主性和安全性,降低人工干预的需求,从而提高生产效率和服务质量。
📄 摘要(原文)
Generating collision-free motions in dynamic environments is a challenging problem for high-dimensional robotics, particularly under real-time constraints. Control Barrier Functions (CBFs), widely utilized in safety-critical control, have shown significant potential for motion generation. However, for high-dimensional robot manipulators, existing QP formulations and CBF-based methods rely on positional information, overlooking higher-order derivatives such as velocities. This limitation may lead to reduced success rates, decreased performance, and inadequate safety constraints. To address this, we construct time-varying CBFs (TVCBFs) that consider velocity conditions for obstacles. Our approach leverages recent developments on distance fields for articulated manipulators, a differentiable representation that enables the mapping of objects' position and velocity into the robot's joint space, offering a comprehensive understanding of the system's interactions. This allows the manipulator to be treated as a point-mass system thus simplifying motion generation tasks. Additionally, we introduce a time-varying control Lyapunov function (TVCLF) to enable whole-body contact motions. Our approach integrates the TVCBF, TVCLF, and manipulator physical constraints within a unified QP framework. We validate our method through simulations and comparisons with state-of-the-art approaches, demonstrating its effectiveness on a 7-axis Franka robot in real-world experiments.