Measuring DNA Microswimmer Locomotion in Complex Flow Environments
作者: Taryn Imamura, Teresa A. Kent, Rebecca E. Taylor, Sarah Bergbreiter
分类: cs.RO
发布日期: 2024-12-19
备注: 6 pages, 8 figures, preprint of ICRA conference submission
💡 一句话要点
提出一种基于示踪微球的微型游泳器运动测量方法,适用于复杂流动环境。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 微型游泳器 微型机器人 复杂流动环境 示踪微球 运动测量
📋 核心要点
- 现有微型游泳器研究缺乏在复杂流动环境中精确测量其运动的方法,难以区分主动运动和环境干扰。
- 该论文提出利用示踪微球来捕捉流体流动和场梯度对微型游泳器轨迹的影响,从而分离出主动运动。
- 通过跟踪铁磁性和非磁性微球,论文展示了该方法在不同流动环境中测量多个微型游泳器运动的有效性。
📝 摘要(中文)
微型游泳器是亚毫米级的游泳微型机器人,在靶向药物递送和微创手术等应用中具有可控运动的潜力。为了在这些目标应用中可行,微型游泳器最终需要在具有动态流体流动和力的环境中导航。目前,针对这一目标的微型游泳器实验研究很少,因为难以将有意的微型游泳器运动与环境引起的运动隔离。本文提出了一种使用示踪微球测量复杂流动环境中微型游泳器运动的方法。通过跟踪铁磁性和非磁性聚苯乙烯示踪微球的粒子运动,我们捕捉了流体流动和场梯度对微型游泳器轨迹的影响。然后,我们确定这些微型游泳器相对于流体流动的场驱动平移,并通过展示多个微型游泳器在不同流动中的运动来证明该方法的有效性。
🔬 方法详解
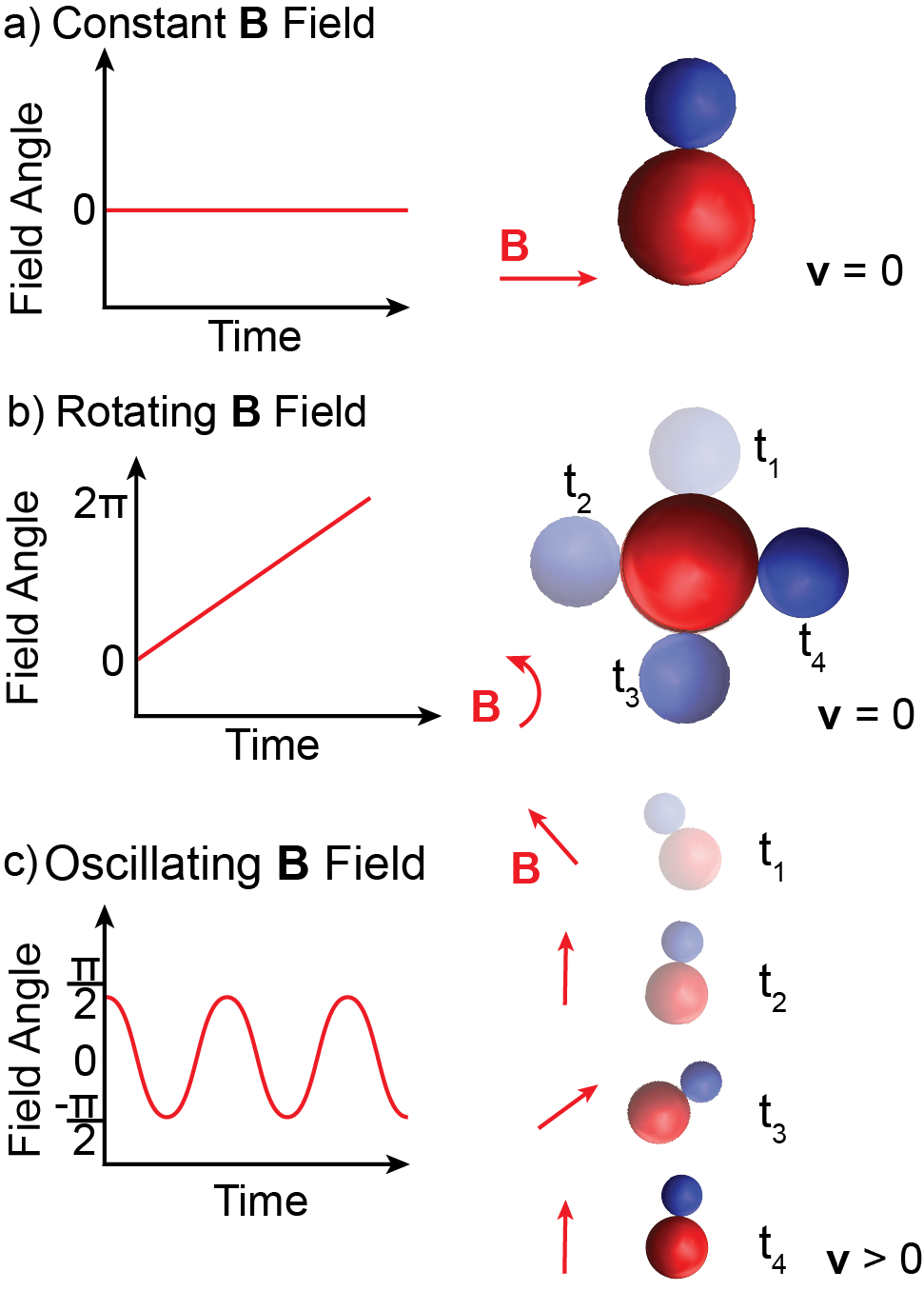
问题定义:该论文旨在解决在复杂流动环境中精确测量微型游泳器运动的问题。现有方法难以区分微型游泳器的主动运动和由环境流体流动以及外加场梯度引起的被动运动,这阻碍了微型游泳器在实际应用中的发展。
核心思路:论文的核心思路是利用示踪微球来表征复杂流动环境。通过同时跟踪微型游泳器和示踪微球的运动,可以分离出由流体流动和场梯度引起的运动,从而更准确地测量微型游泳器的主动运动。这种方法基于一个假设,即示踪微球能够准确反映周围流体的运动状态。
技术框架:该方法主要包含以下几个步骤:1)在包含微型游泳器的流体环境中加入示踪微球(包括铁磁性和非磁性两种);2)使用显微镜等成像设备记录微型游泳器和示踪微球的运动轨迹;3)利用图像处理和跟踪算法提取微型游泳器和示踪微球的坐标信息;4)分析示踪微球的运动,确定流体流动和场梯度的影响;5)从微型游泳器的总运动中减去流体流动和场梯度的影响,得到微型游泳器的主动运动。
关键创新:该方法的关键创新在于利用示踪微球来量化复杂流动环境对微型游泳器运动的影响。与直接测量微型游泳器运动的方法相比,该方法能够更准确地分离出主动运动和被动运动,从而更全面地了解微型游泳器的运动特性。此外,同时使用铁磁性和非磁性微球可以区分磁场梯度的影响。
关键设计:示踪微球的选择需要考虑其尺寸、密度和表面性质,以确保其能够准确反映周围流体的运动状态。铁磁性微球的选择需要考虑其磁化强度,以便能够响应外加磁场。图像处理和跟踪算法的选择需要考虑计算效率和精度。数据分析方法需要能够有效地分离出主动运动和被动运动。
🖼️ 关键图片


📊 实验亮点
该论文通过实验验证了该方法在不同流动环境中测量多个微型游泳器运动的有效性。通过跟踪铁磁性和非磁性微球,成功分离了流体流动和场梯度对微型游泳器运动的影响,并准确测量了微型游泳器的主动运动。实验结果表明,该方法能够有效地表征复杂流动环境,并为微型游泳器的运动控制提供重要信息。
🎯 应用场景
该研究成果可应用于靶向药物递送、微创手术等领域。通过精确控制微型游泳器在复杂生理环境中的运动,可以实现药物的精准释放和病灶的精确治疗。此外,该方法还可以用于研究微型机器人在复杂环境中的运动机理,为微型机器人的设计和控制提供理论指导,并促进微型机器人在环境监测、微流控芯片等领域的应用。
📄 摘要(原文)
Microswimmers are sub-millimeter swimming microrobots that show potential as a platform for controllable locomotion in applications including targeted cargo delivery and minimally invasive surgery. To be viable for these target applications, microswimmers will eventually need to be able to navigate in environments with dynamic fluid flows and forces. Experimental studies with microswimmers towards this goal are currently rare because of the difficulty isolating intentional microswimmer motion from environment-induced motion. In this work, we present a method for measuring microswimmer locomotion within a complex flow environment using fiducial microspheres. By tracking the particle motion of ferromagnetic and non-magnetic polystyrene fiducial microspheres, we capture the effect of fluid flow and field gradients on microswimmer trajectories. We then determine the field-driven translation of these microswimmers relative to fluid flow and demonstrate the effectiveness of this method by illustrating the motion of multiple microswimmers through different flows.