Noise Analysis and Modeling of the PMD Flexx2 Depth Camera for Robotic Applications
作者: Yuke Cai, Davide Plozza, Steven Marty, Paul Joseph, Michele Magno
分类: eess.IV, cs.RO
发布日期: 2024-12-19
备注: Accepted by COINS 2024
期刊: IEEE International Conference on Omni-layer Intelligent Systems (COINS), 2024, pp. 422-427
DOI: 10.1109/COINS61597.2024.10622644
💡 一句话要点
针对机器人应用,提出PMD Flexx2深度相机噪声精确建模方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 深度相机 噪声建模 飞行时间相机 机器人导航 sim-to-real PMD Flexx2 Kullback-Leibler散度
📋 核心要点
- 移动机器人依赖深度相机进行环境感知,但现有深度相机噪声影响了仿真效果和控制精度。
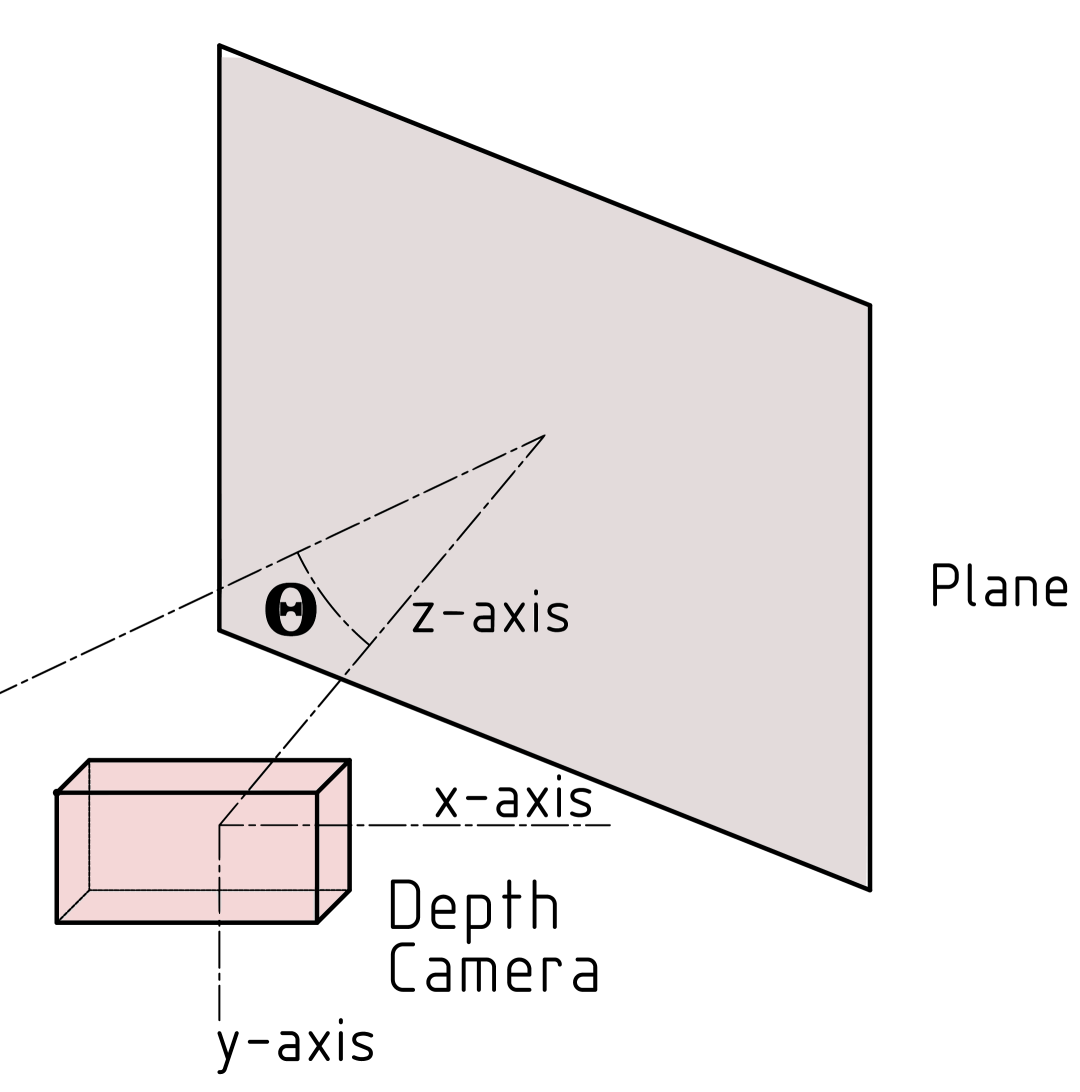
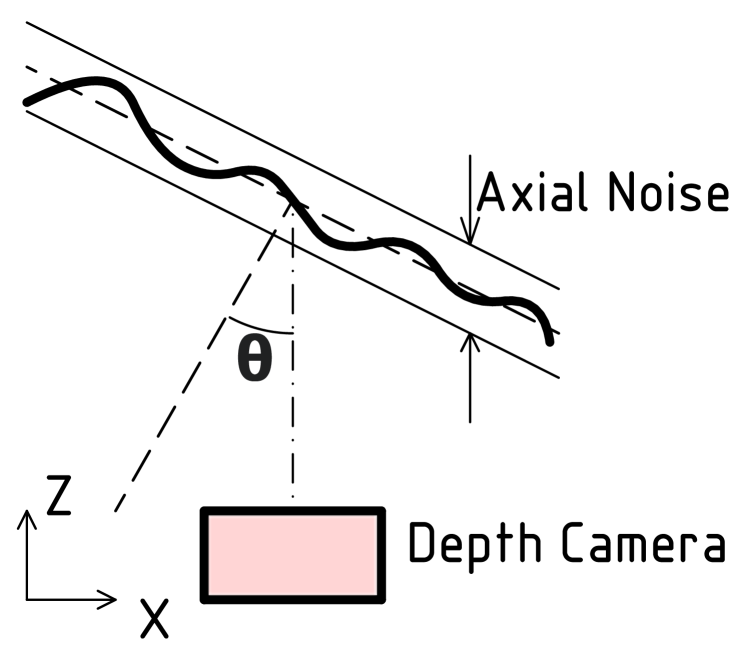
- 论文提出PMD Flexx2深度相机的轴向和横向噪声模型,假设噪声服从高斯分布。
- 实验表明,轴向噪声模型KL散度为0.015 nats,横向噪声模型KL散度为0.868 nats,验证了模型的有效性。
📝 摘要(中文)
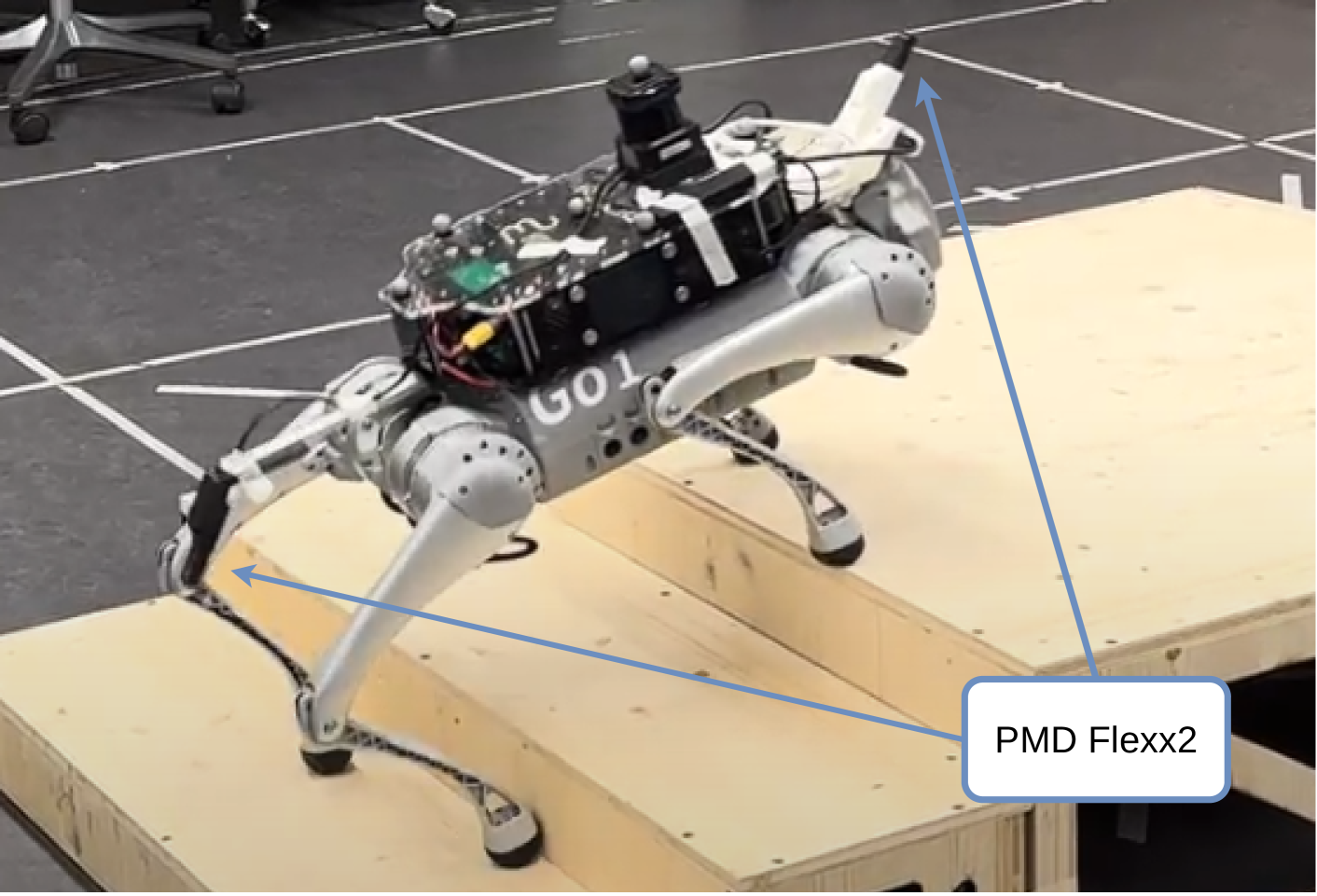
飞行时间(ToF)相机因其捕获实时3D信息的能力而闻名,已成为敏捷移动机器人不可或缺的工具。这些相机利用光信号精确测量距离,使机器人能够精确地在复杂环境中导航。PMD Flexx2等紧凑轻便的创新深度相机特别适合移动机器人。该传感器能够在捕获深度信息的同时实现高帧率,适用于机器人导航和地形测绘等任务。该传感器基于ToF测量原理,与传统的基于立体的深度相机相比具有多种优势。然而,相机产生的深度图像会受到多种来源的噪声的影响,从而使仿真变得复杂。本文提出了一种精确量化和建模PMD Flexx2的非系统噪声的方法。我们提出了在各种相机模式下轴向和横向噪声的模型,假设为高斯分布。轴向噪声被建模为距离和入射角的函数,平均Kullback-Leibler(KL)散度较低,为0.015 nats,反映了精确的噪声特征。横向噪声偏离高斯分布,被保守地建模,产生了令人满意的KL散度,为0.868 nats。这些结果验证了我们的噪声模型,这对于在虚拟环境中精确模拟传感器行为以及减少基于学习的控制方法中的sim-to-real差距至关重要。
🔬 方法详解
问题定义:PMD Flexx2深度相机在机器人应用中受到噪声干扰,影响了深度信息的准确性。现有的深度相机噪声模型不够精确,无法满足高精度机器人仿真的需求,导致sim-to-real的差距较大。因此,需要对PMD Flexx2的噪声进行精确建模,以便在仿真环境中更真实地模拟相机行为。
核心思路:论文的核心思路是对PMD Flexx2的非系统噪声进行量化和建模,分别针对轴向和横向噪声建立模型。通过实验数据分析,假设轴向噪声服从高斯分布,并将其建模为距离和入射角的函数。对于偏离高斯分布的横向噪声,采用保守建模方法,以保证模型的可靠性。
技术框架:该研究的技术框架主要包括以下几个步骤:1) 数据采集:使用PMD Flexx2相机在不同模式下采集深度图像数据。2) 噪声分析:对采集到的数据进行统计分析,分别提取轴向和横向噪声。3) 噪声建模:针对轴向噪声,建立距离和入射角的函数模型,并假设其服从高斯分布。针对横向噪声,采用保守建模方法。4) 模型验证:使用Kullback-Leibler (KL) 散度评估模型的准确性。
关键创新:论文的关键创新在于针对PMD Flexx2深度相机,提出了轴向和横向噪声的精确建模方法。与传统的噪声模型相比,该模型考虑了距离和入射角对轴向噪声的影响,并对非高斯分布的横向噪声进行了保守建模,从而提高了模型的准确性和可靠性。
关键设计:在轴向噪声建模中,将噪声建模为距离和入射角的函数,具体形式未知(论文未给出具体函数形式)。在横向噪声建模中,采用了保守建模方法,具体实现未知(论文未给出具体实现细节)。使用Kullback-Leibler (KL) 散度作为评估模型准确性的指标。具体参数设置未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,轴向噪声模型具有较低的平均Kullback-Leibler (KL) 散度,为0.015 nats,表明该模型能够精确地描述轴向噪声的分布。横向噪声模型具有令人满意的KL散度,为0.868 nats,验证了保守建模方法的有效性。这些结果表明,所提出的噪声模型能够准确地模拟PMD Flexx2深度相机的噪声特性。
🎯 应用场景
该研究成果可应用于机器人导航、地形测绘、三维重建等领域。通过精确的噪声模型,可以提高仿真环境的真实性,从而减少sim-to-real的差距,加速基于学习的机器人控制算法的开发和部署。此外,该模型还可以用于深度图像的去噪和增强,提高深度信息的质量。
📄 摘要(原文)
Time of Flight ToF cameras renowned for their ability to capture realtime 3D information have become indispensable for agile mobile robotics These cameras utilize light signals to accurately measure distances enabling robots to navigate complex environments with precision Innovative depth cameras characterized by their compact size and lightweight design such as the recently released PMD Flexx2 are particularly suited for mobile robots Capable of achieving high frame rates while capturing depth information this innovative sensor is suitable for tasks such as robot navigation and terrain mapping Operating on the ToF measurement principle the sensor offers multiple benefits over classic stereobased depth cameras However the depth images produced by the camera are subject to noise from multiple sources complicating their simulation This paper proposes an accurate quantification and modeling of the nonsystematic noise of the PMD Flexx2 We propose models for both axial and lateral noise across various camera modes assuming Gaussian distributions Axial noise modeled as a function of distance and incidence angle demonstrated a low average KullbackLeibler KL divergence of 0015 nats reflecting precise noise characterization Lateral noise deviating from a Gaussian distribution was modeled conservatively yielding a satisfactory KL divergence of 0868 nats These results validate our noise models crucial for accurately simulating sensor behavior in virtual environments and reducing the simtoreal gap in learningbased control approaches