Dream to Manipulate: Compositional World Models Empowering Robot Imitation Learning with Imagination
作者: Leonardo Barcellona, Andrii Zadaianchuk, Davide Allegro, Samuele Papa, Stefano Ghidoni, Efstratios Gavves
分类: cs.RO, cs.CV
发布日期: 2024-12-19 (更新: 2025-03-10)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
DreMa:基于可组合世界模型的机器人模仿学习,赋能机器人操作
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 世界模型 数字孪生 机器人模仿学习 高斯溅射 物理模拟
📋 核心要点
- 现有世界模型难以精确模仿真实机器人环境,导致不切实际的行为和幻觉,限制了其在实际机器人应用中的潜力。
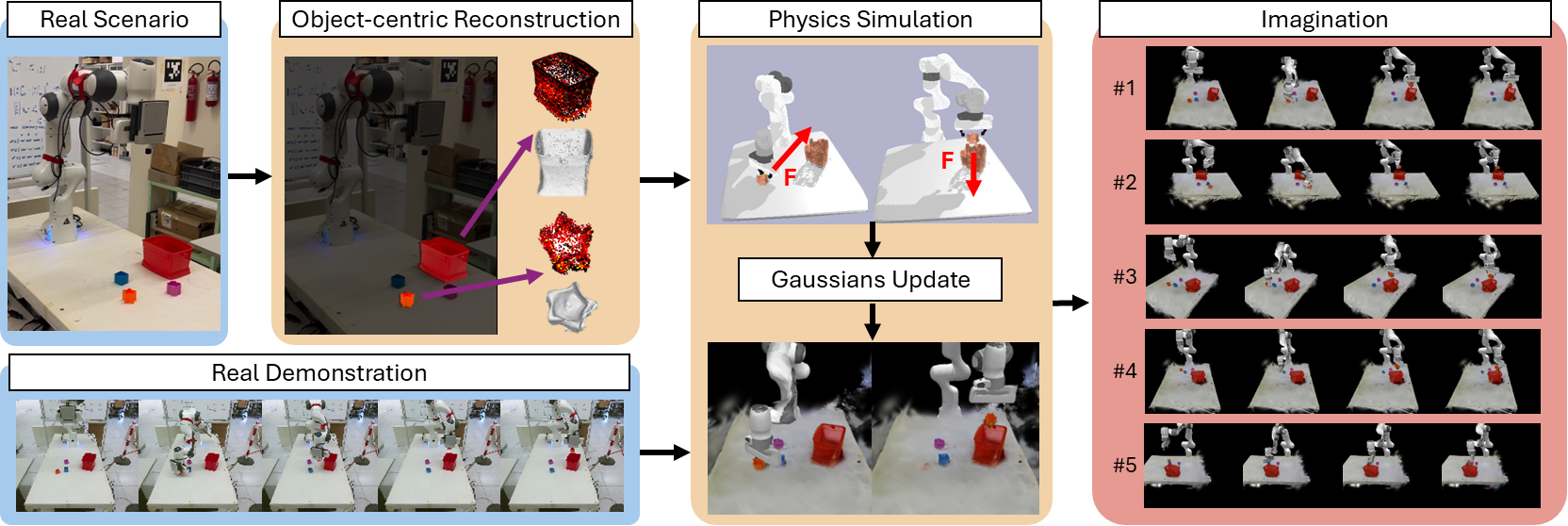
- DreMa通过学习真实世界的显式表征,并结合高斯溅射和物理模拟器,自动构建可组合的数字孪生世界模型。
- 实验表明,DreMa显著提升了模仿学习的准确性和鲁棒性,仅需少量演示数据即可实现单样本策略学习。
📝 摘要(中文)
世界模型为智能体提供环境表征,使其能够预测行为的因果关系。然而,现有的世界模型通常无法直接且显式地模仿机器人面前的真实环境,导致不真实的表现和幻觉,使其不适用于实际机器人应用。为了克服这些挑战,我们重新思考机器人世界模型,将其视为可学习的数字孪生。我们提出DreMa,一种利用学习到的真实世界及其动态的显式表征自动构建数字孪生的新方法,弥合了传统数字孪生和世界模型之间的差距。DreMa通过集成高斯溅射和物理模拟器来复制观察到的世界及其结构,使机器人能够想象物体的新配置,并预测机器人行为的未来结果,这归功于其可组合性。我们利用这种能力,通过对少量演示应用等变变换来生成用于模仿学习的新数据。在各种设置下的评估表明,通过增加动作和对象分布,显著提高了准确性和鲁棒性,减少了学习策略所需的数据,并提高了智能体的泛化能力。最重要的是,我们展示了由DreMa的想象力驱动的真实Franka Emika Panda机器人,仅需每个任务变体的一个示例即可成功学习新的物理任务(单样本策略学习)。
🔬 方法详解
问题定义:论文旨在解决现有世界模型在机器人模仿学习中无法准确、显式地模拟真实环境的问题。现有方法通常依赖于隐式表征或难以泛化的模型,导致机器人无法有效地学习和执行复杂的操作任务。这些方法在面对新的物体配置或环境变化时,表现出较差的泛化能力,需要大量的训练数据。
核心思路:论文的核心思路是将世界模型视为可学习的数字孪生,通过显式地建模真实世界的几何结构和物理属性,使机器人能够更好地理解和预测环境的变化。通过结合高斯溅射和物理模拟器,DreMa能够复制观察到的世界,并利用其可组合性来生成新的训练数据,从而提高模仿学习的效率和泛化能力。
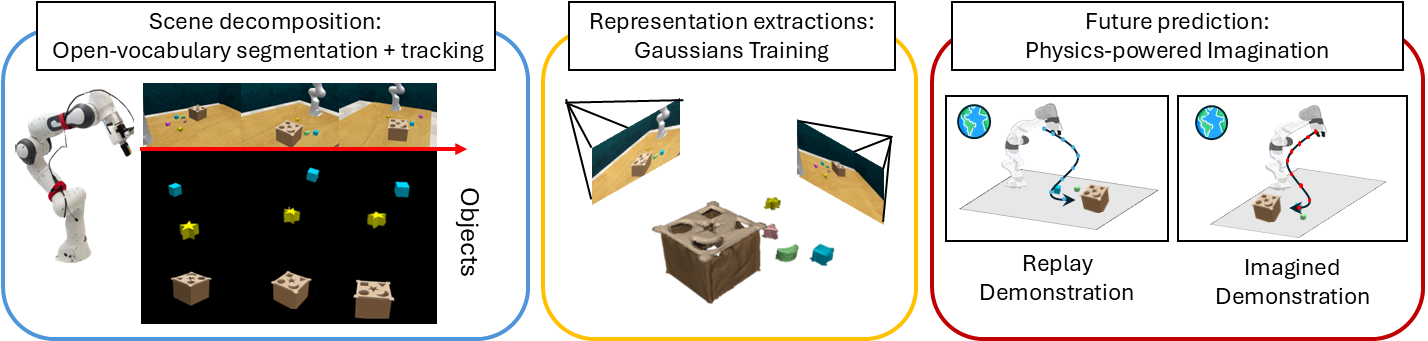
技术框架:DreMa的整体框架包括以下几个主要模块:1) 环境感知模块:利用传感器数据(如RGB-D图像)获取真实世界的观测信息。2) 数字孪生构建模块:使用高斯溅射技术将观测信息转换为显式的三维场景表征,并利用物理模拟器建模物体的物理属性和动态行为。3) 动作规划与预测模块:基于数字孪生环境,机器人可以想象不同的动作序列,并预测其对环境的影响。4) 模仿学习模块:利用生成的虚拟数据训练机器人策略,使其能够模仿人类的动作。
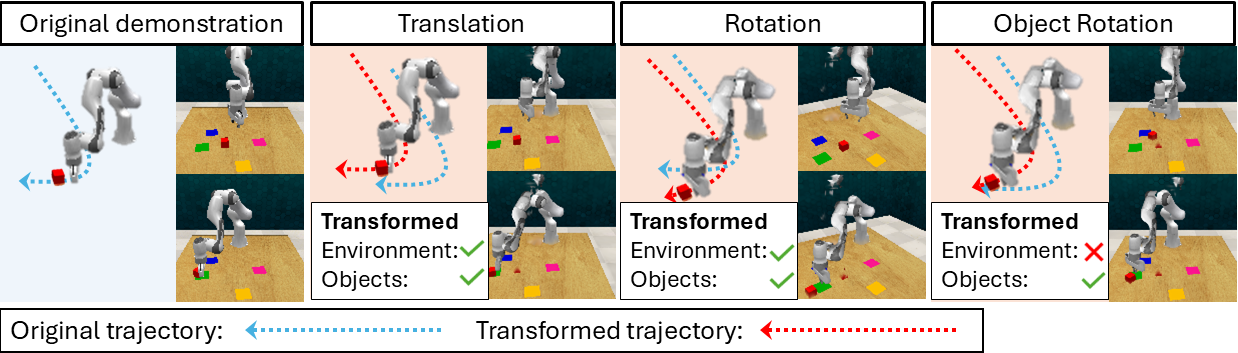
关键创新:DreMa的关键创新在于其将高斯溅射和物理模拟器集成到世界模型中,从而实现了对真实世界的显式建模。这种显式建模方式使得机器人能够更好地理解环境的几何结构和物理属性,并利用其可组合性来生成新的训练数据。此外,DreMa还引入了等变变换来增强数据的多样性,从而提高了模仿学习的泛化能力。
关键设计:DreMa的关键设计包括:1) 高斯溅射的参数化:使用可学习的参数来控制高斯溅射的形状、颜色和透明度,从而更好地拟合真实世界的几何结构。2) 物理模拟器的配置:选择合适的物理引擎和参数,以准确地模拟物体的物理属性和动态行为。3) 等变变换的设计:设计能够保持物体物理属性不变的等变变换,如旋转、平移和缩放,从而生成更多样化的训练数据。4) 损失函数的设计:使用合适的损失函数来优化数字孪生的构建和动作预测的准确性,例如,使用Chamfer Distance来衡量高斯溅射的重建误差,使用物理模拟器的预测误差来优化物理属性的建模。
🖼️ 关键图片
📊 实验亮点
实验结果表明,DreMa在多个机器人操作任务上取得了显著的性能提升。例如,在单样本策略学习任务中,DreMa驱动的Franka Emika Panda机器人仅需一个示例即可成功学习新的物理任务。相较于传统的模仿学习方法,DreMa能够显著提高学习效率和泛化能力,减少对大量训练数据的依赖。
🎯 应用场景
DreMa具有广泛的应用前景,例如在工业自动化、家庭服务机器人、医疗康复等领域。它可以帮助机器人更好地理解和适应复杂多变的环境,从而实现更高效、更安全的操作。通过减少对大量真实数据的依赖,DreMa可以降低机器人学习的成本,并加速其在实际场景中的部署。未来,DreMa有望成为机器人智能的重要组成部分,推动机器人技术的进一步发展。
📄 摘要(原文)
A world model provides an agent with a representation of its environment, enabling it to predict the causal consequences of its actions. Current world models typically cannot directly and explicitly imitate the actual environment in front of a robot, often resulting in unrealistic behaviors and hallucinations that make them unsuitable for real-world robotics applications. To overcome those challenges, we propose to rethink robot world models as learnable digital twins. We introduce DreMa, a new approach for constructing digital twins automatically using learned explicit representations of the real world and its dynamics, bridging the gap between traditional digital twins and world models. DreMa replicates the observed world and its structure by integrating Gaussian Splatting and physics simulators, allowing robots to imagine novel configurations of objects and to predict the future consequences of robot actions thanks to its compositionality. We leverage this capability to generate new data for imitation learning by applying equivariant transformations to a small set of demonstrations. Our evaluations across various settings demonstrate significant improvements in accuracy and robustness by incrementing actions and object distributions, reducing the data needed to learn a policy and improving the generalization of the agents. As a highlight, we show that a real Franka Emika Panda robot, powered by DreMa's imagination, can successfully learn novel physical tasks from just a single example per task variation (one-shot policy learning). Our project page can be found in: https://dreamtomanipulate.github.io/.