Embedding high-resolution touch across robotic hands enables adaptive human-like grasping
作者: Zihang Zhao, Wanlin Li, Yuyang Li, Tengyu Liu, Boren Li, Meng Wang, Kai Du, Hangxin Liu, Yixin Zhu, Qining Wang, Kaspar Althoefer, Song-Chun Zhu
分类: cs.RO
发布日期: 2024-12-19 (更新: 2025-09-12)
DOI: 10.1038/s42256-025-01053-3
💡 一句话要点
F-TAC Hand:高分辨率触觉机器人手实现类人自适应抓取
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人手 触觉传感 高分辨率 仿生设计 自适应抓取
📋 核心要点
- 现有机器人手在动态环境中难以匹配人类的灵活性,主要原因是缺乏充分的触觉反馈。
- 论文提出F-TAC Hand,通过高分辨率触觉传感和仿生设计,提升机器人手对环境的感知能力。
- 实验表明,F-TAC Hand在复杂操作任务中显著优于非触觉系统,验证了触觉信息的重要性。
📝 摘要(中文)
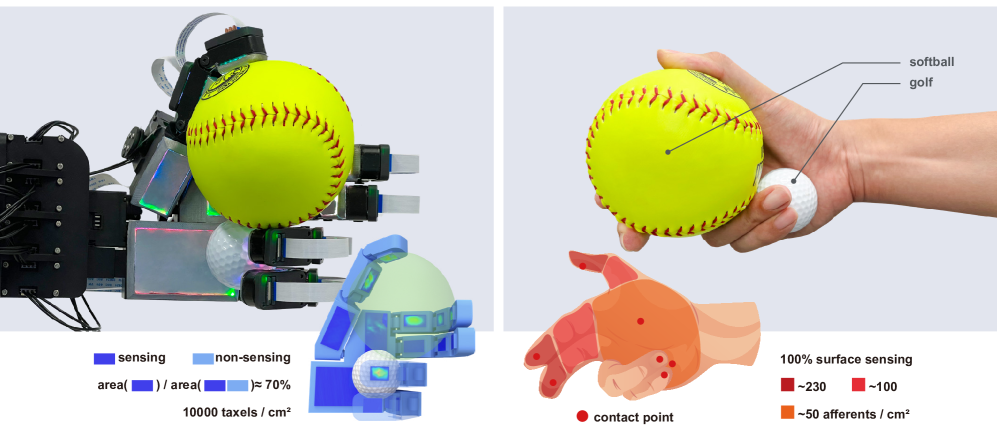
本文提出了一种名为F-TAC Hand的仿生机器人手,其特点是在70%的表面积上集成了高分辨率(0.1mm空间分辨率)的触觉传感。通过优化手部设计,克服了集成高分辨率触觉传感器同时保持完整运动范围的传统挑战。该机器人手由一种生成算法驱动,该算法可以合成类人手部配置,从而在动态真实环境中展示出强大的抓取能力。在600次真实世界试验中进行的广泛评估表明,这种触觉嵌入式系统在复杂的操纵任务中显著优于非触觉信息系统(p<0.0001)。这些结果为丰富的触觉嵌入在开发先进机器人智能中的关键作用提供了经验证据,为物理传感能力和智能行为之间的关系提供了新的视角。
🔬 方法详解
问题定义:现有机器人手在动态环境中进行复杂操作时,由于缺乏足够精细和全面的触觉反馈,难以像人类一样灵活自如地调整抓握姿态和力度,从而导致抓取失败或操作精度不足。传统的触觉传感器集成方案往往会牺牲手部的运动范围或灵活性。
核心思路:论文的核心思路是通过设计一种仿生机器人手,并在其表面集成高分辨率的触觉传感器,从而为机器人提供更丰富、更精确的触觉信息。同时,通过优化手部结构设计,克服高分辨率传感器集成带来的运动范围限制问题,最终实现类人手的灵活性和操作能力。
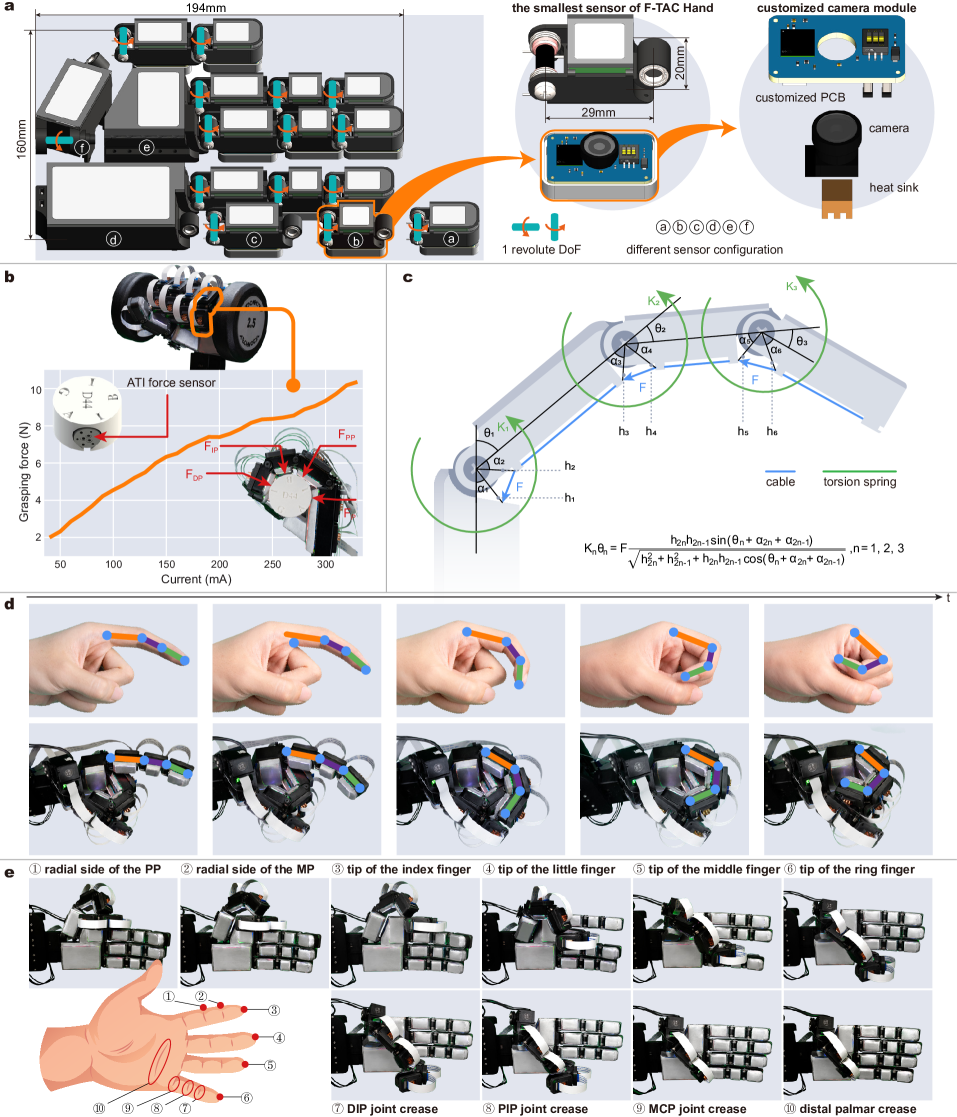
技术框架:F-TAC Hand系统主要包含以下几个部分:1) 仿生机器人手的设计与制造,重点在于优化手部结构以集成高分辨率触觉传感器;2) 高分辨率触觉传感器的集成,覆盖手部70%的表面积,空间分辨率达到0.1mm;3) 基于生成算法的手部配置合成,模拟人类手部的自然运动模式;4) 触觉数据处理与控制算法,利用触觉信息进行抓取姿态调整和力度控制。
关键创新:论文的关键创新在于:1) 实现了高分辨率触觉传感器在机器人手上的大面积集成,显著提升了触觉感知能力;2) 通过优化手部结构设计,在集成高分辨率传感器的同时,保证了手部的完整运动范围;3) 提出了基于生成算法的手部配置合成方法,使机器人手能够模拟人类的自然抓取动作。
关键设计:在手部结构设计上,论文可能采用了轻量化材料和模块化设计,以减轻传感器集成带来的重量负担,并方便传感器的更换和维护。在触觉数据处理方面,可能采用了滤波、校准等预处理方法,以提高数据的准确性和可靠性。在控制算法方面,可能采用了力/位混合控制策略,以实现精确的抓取和操作。
🖼️ 关键图片

📊 实验亮点
实验结果表明,配备F-TAC Hand的机器人手在600次真实世界试验中,显著优于非触觉信息系统(p<0.0001)。这意味着在复杂的操纵任务中,F-TAC Hand的性能得到了显著提升。具体的性能指标(如抓取成功率、操作精度等)未在摘要中明确给出,但p值表明该提升具有高度的统计显著性。
🎯 应用场景
该研究成果可应用于各种需要精细操作和动态适应性的场景,例如:医疗手术机器人、智能装配线、家庭服务机器人、以及危险环境下的远程操作。高分辨率触觉反馈能够显著提升机器人的操作精度和安全性,使其能够更好地适应复杂多变的环境,并完成更具挑战性的任务。未来,该技术有望推动机器人智能的进一步发展,实现更高级别的自主操作。
📄 摘要(原文)
Developing robotic hands that adapt to real-world dynamics remains a fundamental challenge in robotics and machine intelligence. Despite significant advances in replicating human hand kinematics and control algorithms, robotic systems still struggle to match human capabilities in dynamic environments, primarily due to inadequate tactile feedback. To bridge this gap, we present F-TAC Hand, a biomimetic hand featuring high-resolution tactile sensing (0.1mm spatial resolution) across 70% of its surface area. Through optimized hand design, we overcome traditional challenges in integrating high-resolution tactile sensors while preserving the full range of motion. The hand, powered by our generative algorithm that synthesizes human-like hand configurations, demonstrates robust grasping capabilities in dynamic real-world conditions. Extensive evaluation across 600 real-world trials demonstrates that this tactile-embodied system significantly outperforms non-tactile-informed alternatives in complex manipulation tasks (p<0.0001). These results provide empirical evidence for the critical role of rich tactile embodiment in developing advanced robotic intelligence, offering new perspectives on the relationship between physical sensing capabilities and intelligent behavior.