EPN: An Ego Vehicle Planning-Informed Network for Target Trajectory Prediction
作者: Saiqian Peng, Duanfeng Chu, Guanjie Li, Liping Lu, Jinxiang Wang
分类: cs.RO
发布日期: 2024-12-19 (更新: 2025-02-13)
💡 一句话要点
提出EPN,利用自车规划信息进行目标车辆轨迹预测,显著提升预测精度。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 轨迹预测 自动驾驶 自车规划 多模态预测 终点预测
📋 核心要点
- 现有轨迹预测方法难以准确预测目标车辆轨迹,主要由于其高度动态性和多模态性。
- EPN将自车未来规划轨迹融入目标车辆轨迹预测,模拟车辆间的相互影响,提升预测准确性。
- 实验结果表明,EPN在NGSIM和HighD数据集上显著降低了RMSE、ADE和FDE等指标。
📝 摘要(中文)
本文提出了一种基于自车规划信息的网络(EPN)用于多模态轨迹预测,旨在提高自动驾驶车辆的安全性。针对目标车辆轨迹预测中动态性和多模态性的挑战,EPN将自车未来规划轨迹作为输入,模拟车辆间的相互影响。此外,为了解决基于驾驶意图的方法中存在的意图模糊和预测误差大的问题,本文设计了一个目标车辆终点预测模块,该模块预测目标车辆的终点,并通过修正机制进行优化,最终生成多模态预测轨迹。实验结果表明,EPN在NGSIM数据集上,RMSE、ADE和FDE分别平均降低了34.9%、30.7%和30.4%;在HighD数据集上,RMSE、ADE和FDE分别平均降低了64.6%、64.5%和64.3%。代码将在论文接收后开源。
🔬 方法详解
问题定义:论文旨在解决自动驾驶场景下目标车辆轨迹预测精度不足的问题。现有方法通常忽略了自车行为对周围车辆的影响,或者在利用驾驶意图进行预测时,容易受到意图模糊和预测误差的影响,导致预测结果不准确。
核心思路:论文的核心思路是将自车未来的规划轨迹作为额外信息融入到目标车辆的轨迹预测中,从而模拟车辆之间的相互影响。此外,通过预测目标车辆的终点,并进行修正,来解决意图模糊和预测误差大的问题,从而提高轨迹预测的准确性。
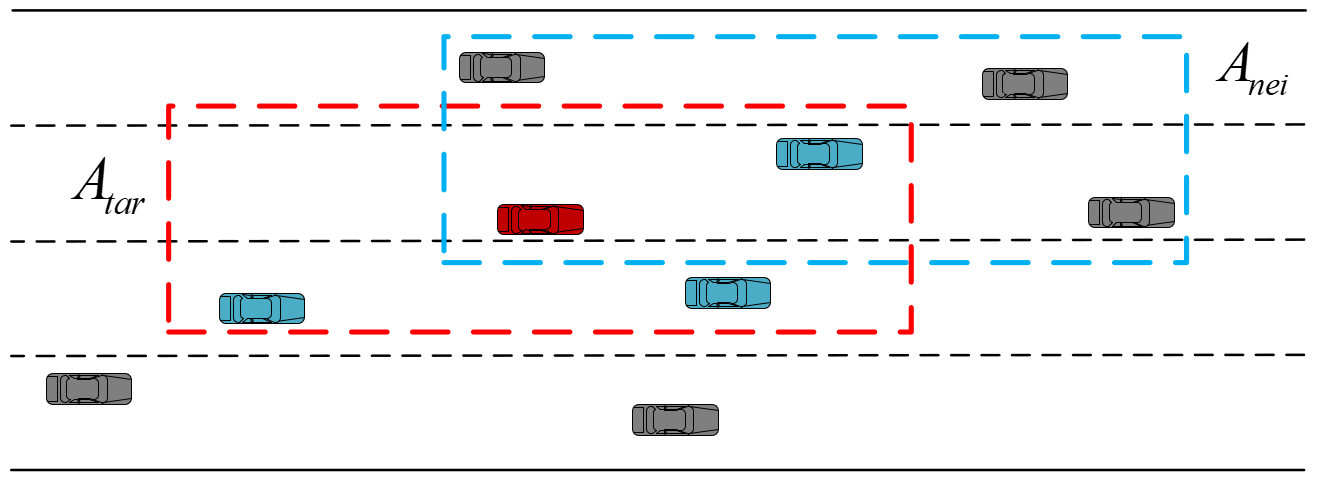
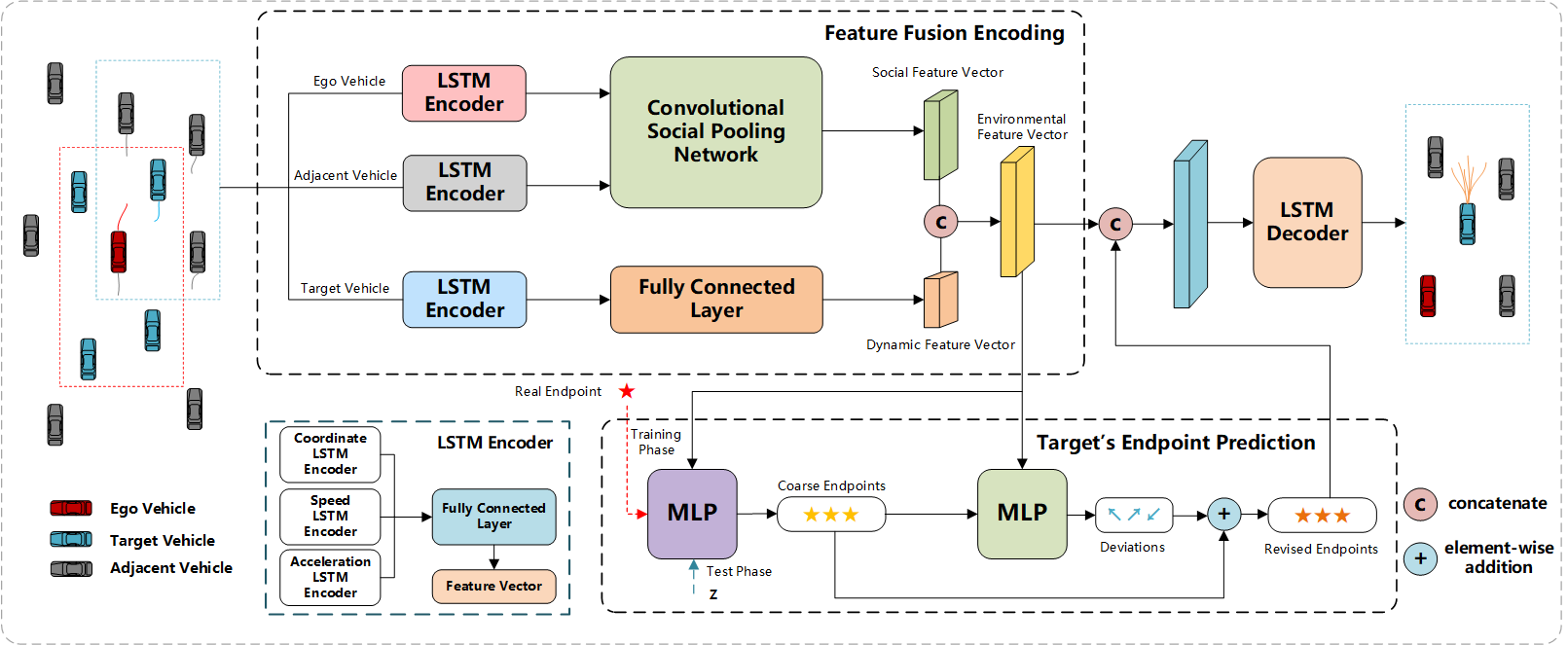
技术框架:EPN的整体架构包含以下几个主要模块:1) 历史轨迹编码器:用于提取目标车辆和周围车辆的历史轨迹特征。2) 自车规划轨迹编码器:用于提取自车未来规划轨迹的特征。3) 交互模块:融合目标车辆、周围车辆和自车的特征,模拟车辆间的相互影响。4) 终点预测模块:预测目标车辆的终点,并进行修正。5) 轨迹生成模块:基于融合的特征和预测的终点,生成多模态的预测轨迹。
关键创新:论文的关键创新在于:1) 将自车规划轨迹融入到目标车辆轨迹预测中,考虑了车辆间的相互影响。2) 提出了终点预测模块,通过预测和修正终点来解决意图模糊和预测误差大的问题。
关键设计:论文中关于网络结构和损失函数等技术细节未详细描述,具体参数设置未知。终点预测模块的修正机制的具体实现方式未知。损失函数可能包含轨迹预测损失和终点预测损失,具体形式未知。
🖼️ 关键图片

📊 实验亮点
EPN在NGSIM数据集上,RMSE、ADE和FDE分别平均降低了34.9%、30.7%和30.4%。在HighD数据集上,RMSE、ADE和FDE分别平均降低了64.6%、64.5%和64.3%。实验结果表明,EPN在两个公开数据集上都取得了显著的性能提升,验证了其有效性。
🎯 应用场景
该研究成果可应用于自动驾驶系统,提高自动驾驶车辆对周围车辆行为的预测能力,从而提升自动驾驶的安全性。通过更准确的轨迹预测,自动驾驶车辆可以做出更合理的决策,例如变道、超车、避让等,从而减少交通事故的发生。此外,该技术还可以应用于高级驾驶辅助系统(ADAS),为驾驶员提供更准确的预警信息。
📄 摘要(原文)
Trajectory prediction plays a crucial role in improving the safety of autonomous vehicles. However, due to the highly dynamic and multimodal nature of the task, accurately predicting the future trajectory of a target vehicle remains a significant challenge. To address this challenge, we propose an Ego vehicle Planning-informed Network (EPN) for multimodal trajectory prediction. In real-world driving, the future trajectory of a vehicle is influenced not only by its own historical trajectory, but also by the behavior of other vehicles. So, we incorporate the future planned trajectory of the ego vehicle as an additional input to simulate the mutual influence between vehicles. Furthermore, to tackle the challenges of intention ambiguity and large prediction errors often encountered in methods based on driving intentions, we propose an endpoint prediction module for the target vehicle. This module predicts the target vehicle endpoints, refines them using a correction mechanism, and generates a multimodal predicted trajectory. Experimental results demonstrate that EPN achieves an average reduction of 34.9%, 30.7%, and 30.4% in RMSE, ADE, and FDE on the NGSIM dataset, and an average reduction of 64.6%, 64.5%, and 64.3% in RMSE, ADE, and FDE on the HighD dataset. The code will be open sourced after the letter is accepted.