Cutting Sequence Diffuser: Sim-to-Real Transferable Planning for Object Shaping by Grinding
作者: Takumi Hachimine, Jun Morimoto, Takamitsu Matsubara
分类: cs.RO
发布日期: 2024-12-19 (更新: 2025-09-05)
备注: 8 pages, Accepted by Robotics and Automation Letter
💡 一句话要点
提出切割序列扩散器(CSD),用于磨削机器人进行可迁移的物体塑形规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人磨削 物体塑形 扩散模型 仿真迁移 长时程规划
📋 核心要点
- 机器人磨削塑形面临形状转变建模难题,去除阻力受多种因素影响,真实数据收集成本高且过程不可逆。
- 提出切割序列扩散器(CSD),通过仿真数据学习,规划可迁移到真实世界的长时程动作序列。
- CSD设计平滑动作空间并约束去除量,降低仿真与现实差距,利用扩散模型减少规划时间并满足去除量约束。
📝 摘要(中文)
本文提出了一种用于磨削物体塑形的切割序列扩散器(CSD)。利用机器人通过旋转的砂带进行磨削来塑造物体是一个重要的工业过程。该过程会产生去除阻力,这取决于材料类型、去除量和机器人磨削姿态等工艺条件,所有这些都使形状转变的分析建模变得复杂。此外,由于数据收集成本高和过程的不可逆性,基于真实世界数据的驱动方法具有挑战性。CSD仅需要简单的仿真数据进行模型学习,提供了一种有效的方法来规划可转移到真实世界的长时程动作序列。我们的方法设计了一个平滑的动作空间,并约束了小的去除量,以抑制由去除阻力引起的形状转变的复杂性,从而减少了仿真中的现实差距。此外,通过使用扩散模型生成长时程动作序列,我们的方法减少了规划时间,并允许在遵守每步小去除量约束的同时磨削目标形状。通过在仿真和真实机器人实验中的评估,我们证实了我们的CSD对于在短时间内磨削不同材料和各种目标形状是有效的。
🔬 方法详解
问题定义:论文旨在解决机器人磨削塑形中,由于去除阻力复杂性导致形状转变难以建模的问题。现有方法依赖大量真实数据,但数据收集成本高昂且磨削过程不可逆,难以进行数据驱动的建模。因此,需要一种能够仅通过少量仿真数据即可学习,并能有效迁移到真实环境的规划方法。
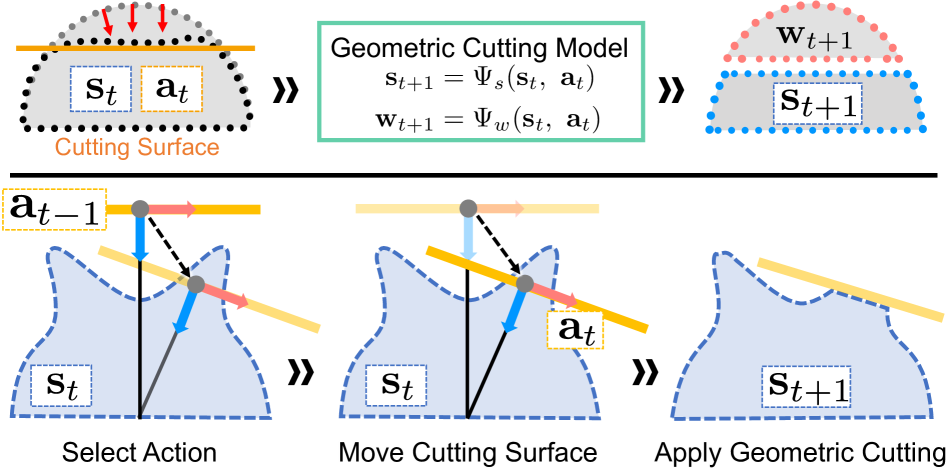
核心思路:论文的核心思路是利用扩散模型生成长时程的切割动作序列,同时通过约束每次切割的去除量,降低形状转变的复杂性,从而减小仿真与现实之间的差距。通过在平滑的动作空间中进行规划,可以更好地控制磨削过程,并提高规划的效率和可迁移性。
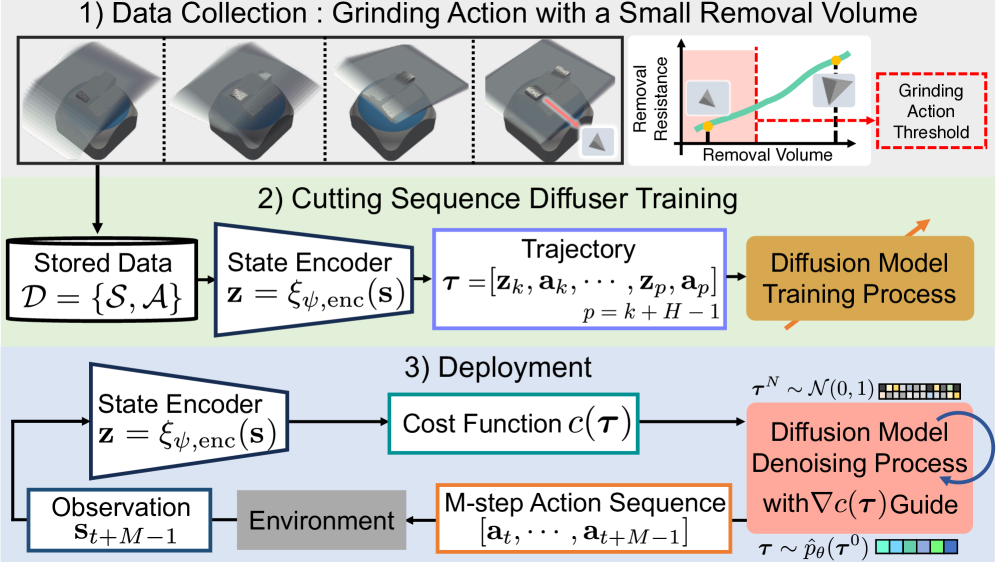
技术框架:CSD的整体框架包含以下几个主要部分:1) 基于仿真的数据生成,用于训练扩散模型;2) 扩散模型,用于生成长时程的切割动作序列;3) 动作空间设计,通过约束去除量来简化形状转变;4) 真实机器人实验验证,评估CSD的性能和可迁移性。该框架利用扩散模型强大的生成能力,结合精心设计的动作空间,实现了高效且可迁移的磨削规划。
关键创新:论文的关键创新在于将扩散模型应用于机器人磨削塑形领域,并设计了一种平滑且受约束的动作空间。与传统的基于优化的规划方法相比,扩散模型能够更有效地生成长时程的动作序列,并减少规划时间。同时,通过约束去除量,降低了形状转变的复杂性,从而减小了仿真与现实之间的差距。
关键设计:论文的关键设计包括:1) 动作空间的设计,通过约束每次切割的去除量,保证了形状转变的平滑性;2) 扩散模型的选择和训练,使用了合适的扩散模型结构和训练策略,以保证生成动作序列的质量和多样性;3) 仿真环境的搭建,尽可能地模拟真实环境,以提高模型的可迁移性。具体的参数设置和网络结构在论文中应该有详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
实验结果表明,CSD在仿真和真实机器人实验中均表现出色,能够快速有效地磨削不同材料和各种目标形状。具体性能数据(如磨削精度、时间等)以及与基线方法的对比(如传统优化方法)在摘要中未提及,需要查阅论文全文以获取更详细的信息。
🎯 应用场景
该研究成果可应用于自动化制造领域,例如金属零件的精细打磨、复杂曲面零件的抛光等。通过减少对真实数据的依赖,降低了机器人磨削系统的部署成本和难度,加速了工业自动化进程。未来,该技术有望扩展到其他材料去除工艺,如铣削、钻孔等。
📄 摘要(原文)
Automating object shaping by grinding with a robot is a crucial industrial process that involves removing material with a rotating grinding belt. This process generates removal resistance depending on such process conditions as material type, removal volume, and robot grinding posture, all of which complicate the analytical modeling of shape transitions. Additionally, a data-driven approach based on real-world data is challenging due to high data collection costs and the irreversible nature of the process. This paper proposes a Cutting Sequence Diffuser (CSD) for object shaping by grinding. The CSD, which only requires simple simulation data for model learning, offers an efficient way to plan long-horizon action sequences transferable to the real world. Our method designs a smooth action space with constrained small removal volumes to suppress the complexity of the shape transitions caused by removal resistance, thus reducing the reality gap in simulations. Moreover, by using a diffusion model to generate long-horizon action sequences, our approach reduces the planning time and allows for grinding the target shape while adhering to the constraints of a small removal volume per step. Through evaluations in both simulation and real robot experiments, we confirmed that our CSD was effective for grinding to different materials and various target shapes in a short time.