Planning Human-Robot Co-manipulation with Human Motor Control Objectives and Multi-component Reaching Strategies
作者: Kevin Haninger, Luka Peternel
分类: cs.RO, eess.SY
发布日期: 2024-12-18
备注: 10 Pages
💡 一句话要点
提出基于人类运动控制目标的协作机器人运动规划方法,提升人机协同效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机协作 运动规划 人类运动控制 轨迹优化 机器人
📋 核心要点
- 现有的人机协作方法在泛化性和数据效率方面存在不足,难以准确预测人类行为。
- 本文利用人类运动控制模型,通过优化轨迹来模拟人类行为,并将其融入机器人运动规划中。
- 实验表明,该方法能够生成类人轨迹,并在不确定目标到达和同步运动任务中表现良好。
📝 摘要(中文)
为了实现成功的目标导向人机交互,机器人应适应协作人类的意图和行为。现有的方法包括肌肉骨骼模型和数据驱动模型,前者局限于人体工程学等底层功能,后者泛化能力或数据效率有限。本文提出将人类运动控制模型融入机器人规划方法中,该模型基于速度-精度和成本-效益的权衡,能够提供可泛化的人类行为估计。我们将人类运动控制中常用的目标函数最小化方法应用于数值轨迹优化,并通过约束和新变量扩展该方法,实现协作运动规划和目标估计。我们在不确定目标到达和同步运动任务中部署了该模型以及多组件运动策略,结果表明该方法能够在各种条件下生成类人轨迹。
🔬 方法详解
问题定义:论文旨在解决人机协作中机器人如何更好地适应人类意图和行为的问题。现有方法,如肌肉骨骼模型,过于底层,难以捕捉复杂的人类行为;而数据驱动模型,泛化能力有限,需要大量数据。这些方法难以在机器人运动规划中有效集成人类行为的预测。
核心思路:论文的核心思路是利用人类运动控制模型来预测人类行为,并将其作为机器人运动规划的目标函数。通过最小化该目标函数,机器人可以生成更自然、更符合人类意图的运动轨迹。这种方法基于人类运动控制的成熟理论,具有较好的泛化能力和数据效率。
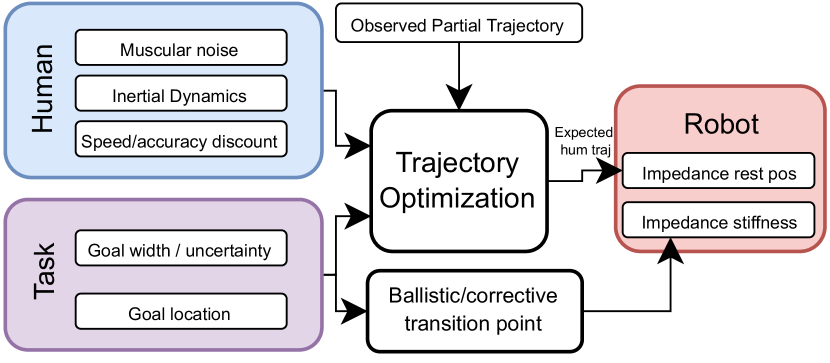
技术框架:整体框架包括以下几个主要步骤:1) 建立基于速度-精度和成本-效益权衡的人类运动控制模型;2) 将该模型转化为数值轨迹优化问题,即最小化一个目标函数;3) 通过添加约束和新变量,将该优化问题扩展到协作运动规划和目标估计;4) 将规划好的机器人轨迹应用于实际的人机协作任务中。
关键创新:最重要的创新点是将人类运动控制模型与机器人运动规划相结合。与传统方法相比,该方法能够更准确地预测人类行为,并生成更自然、更符合人类意图的机器人运动轨迹。此外,论文还提出了一个多组件运动策略,进一步提高了人机协作的效率和安全性。
关键设计:论文的关键设计包括:1) 选择合适的人类运动控制模型,例如基于速度-精度权衡的模型;2) 设计合适的目标函数,例如最小化运动时间和能量消耗;3) 选择合适的优化算法,例如数值轨迹优化算法;4) 设计合适的约束条件,例如避免碰撞和保持同步。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够在各种条件下生成类人轨迹,并在不确定目标到达和同步运动任务中表现良好。具体来说,机器人能够根据人类的意图调整其运动轨迹,并与人类保持同步。此外,该方法还能够有效地估计人类的目标位置,从而更好地辅助人类完成任务。虽然论文中没有给出具体的性能数据和对比基线,但实验结果表明该方法具有良好的应用前景。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如:工业装配、医疗康复、家庭服务等。通过使机器人能够更好地理解和适应人类行为,可以提高人机协作的效率、安全性,并降低人类操作员的认知负荷。未来,该方法有望应用于更复杂的协作任务,例如:多机器人协作、人机混合团队等。
📄 摘要(原文)
For successful goal-directed human-robot interaction, the robot should adapt to the intentions and actions of the collaborating human. This can be supported by musculoskeletal or data-driven human models, where the former are limited to lower-level functioning such as ergonomics, and the latter have limited generalizability or data efficiency. What is missing, is the inclusion of human motor control models that can provide generalizable human behavior estimates and integrate into robot planning methods. We use well-studied models from human motor control based on the speed-accuracy and cost-benefit trade-offs to plan collaborative robot motions. In these models, the human trajectory minimizes an objective function, a formulation we adapt to numerical trajectory optimization. This can then be extended with constraints and new variables to realize collaborative motion planning and goal estimation. We deploy this model, as well as a multi-component movement strategy, in physical collaboration with uncertain goal-reaching and synchronized motion tasks, showing the ability of the approach to produce human-like trajectories over a range of conditions.