Enhancing Exploration Efficiency using Uncertainty-Aware Information Prediction
作者: Seunghwan Kim, Heejung Shin, Gaeun Yim, Changseung Kim, Hyondong Oh
分类: cs.RO
发布日期: 2024-12-17
备注: 7pages
💡 一句话要点
提出一种基于不确定性感知信息预测的自主探索方法,提升探索效率。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 自主探索 机器人 不确定性感知 贝叶斯神经网络 占据栅格地图 互信息 路径规划
📋 核心要点
- 现有自主探索方法在未知环境中效率较低,难以快速准确地构建地图。
- 该论文提出利用不确定性感知的贝叶斯神经网络预测占据栅格地图,并将其不确定性融入互信息计算中。
- 在真实模拟器环境中的实验表明,该方法在探索效率方面优于其他信息度量方法。
📝 摘要(中文)
自主探索是机器人学的一个关键方面,它使机器人能够在没有先验知识的情况下探索未知环境并生成地图。本文提出了一种通过将基于神经网络的占据栅格地图预测与不确定性感知贝叶斯神经网络相结合来提高探索效率的方法。来自基于神经网络的占据栅格地图预测的不确定性被概率性地整合到互信息中,用于指导探索。为了证明所提出方法的有效性,我们在一个真实的模拟器环境中,针对各种信息度量,在一个前沿探索框架内进行了比较模拟。结果表明,所提出的方法在探索效率方面表现出优越的性能。
🔬 方法详解
问题定义:自主探索旨在使机器人在未知环境中高效构建地图。现有方法通常依赖于启发式策略或简单的信息增益计算,难以充分利用预测信息,导致探索效率低下,尤其是在复杂环境中。现有方法无法有效处理预测的不确定性,容易陷入局部最优。
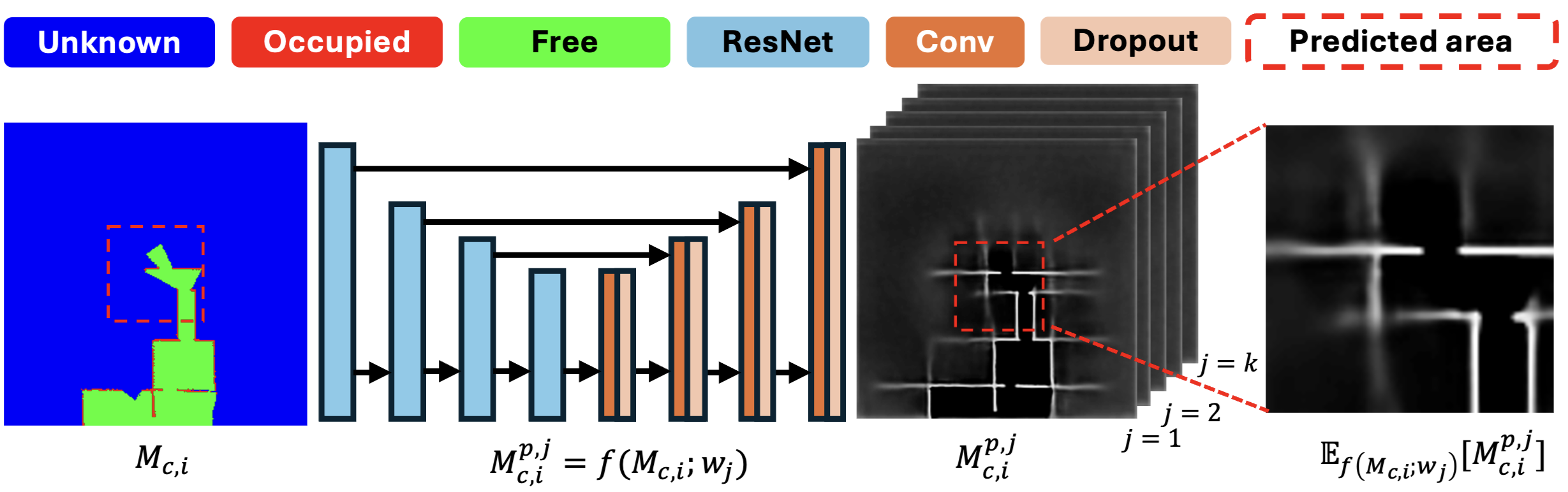
核心思路:该论文的核心思路是利用神经网络预测占据栅格地图,并使用贝叶斯神经网络量化预测的不确定性。然后,将这种不确定性信息融入到互信息计算中,引导机器人优先探索那些预测不确定性高的区域,从而更有效地获取新信息。通过这种方式,机器人可以更智能地选择下一步的探索目标,避免盲目探索。
技术框架:该方法主要包含以下几个模块:1) 基于神经网络的占据栅格地图预测模块:使用神经网络预测当前状态下未探索区域的占据情况。2) 不确定性估计模块:利用贝叶斯神经网络量化预测结果的不确定性。3) 互信息计算模块:将预测的占据栅格地图和不确定性信息结合,计算每个潜在探索目标点的互信息。4) 路径规划模块:根据互信息选择最佳的探索目标点,并规划到达该点的路径。整体流程是,机器人首先利用传感器数据更新地图,然后使用神经网络预测未探索区域的占据情况和不确定性,接着计算互信息并选择最佳探索目标,最后移动到该目标点并重复上述过程。
关键创新:该方法最重要的创新点在于将神经网络预测的不确定性融入到自主探索的决策过程中。传统方法通常只关注预测的占据概率,而忽略了预测的不确定性。通过利用贝叶斯神经网络量化不确定性,并将其与互信息结合,该方法能够更准确地评估每个潜在探索目标点的价值,从而更有效地引导机器人进行探索。与现有方法相比,该方法能够更好地平衡探索的效率和安全性。
关键设计:论文中使用了贝叶斯神经网络来估计预测的不确定性。具体来说,可以使用诸如 Monte Carlo Dropout 或 Deep Ensembles 等技术来实现贝叶斯神经网络。损失函数的设计需要考虑预测的准确性和不确定性的校准。例如,可以使用负对数似然损失函数来训练神经网络,并使用适当的正则化技术来防止过拟合。此外,互信息的计算也需要仔细设计,以确保不确定性信息能够有效地影响探索决策。具体参数设置未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在探索效率方面优于传统的基于互信息的探索方法。具体来说,在相同的探索时间内,该方法能够覆盖更大的区域,并构建更完整的地图。与基线方法相比,该方法在探索效率方面提升了未知百分比(具体数值未知)。这些结果表明,将不确定性信息融入到自主探索的决策过程中可以显著提高探索效率。
🎯 应用场景
该研究成果可应用于各种需要自主探索的场景,例如:灾难救援、矿产勘探、环境监测、以及未知环境下的机器人导航。通过提高探索效率,可以更快地获取环境信息,从而为后续的任务规划和决策提供支持。该方法还可以扩展到其他类型的机器人平台,例如无人机和水下机器人。
📄 摘要(原文)
Autonomous exploration is a crucial aspect of robotics, enabling robots to explore unknown environments and generate maps without prior knowledge. This paper proposes a method to enhance exploration efficiency by integrating neural network-based occupancy grid map prediction with uncertainty-aware Bayesian neural network. Uncertainty from neural network-based occupancy grid map prediction is probabilistically integrated into mutual information for exploration. To demonstrate the effectiveness of the proposed method, we conducted comparative simulations within a frontier exploration framework in a realistic simulator environment against various information metrics. The proposed method showed superior performance in terms of exploration efficiency.