Visual-Based Forklift Learning System Enabling Zero-Shot Sim2Real Without Real-World Data
作者: Koshi Oishi, Teruki Kato, Hiroya Makino, Seigo Ito
分类: cs.RO
发布日期: 2024-12-16 (更新: 2025-05-06)
备注: Accepted for publication in: 2025 International Conference on Robotics and Automation (ICRA)
💡 一句话要点
提出基于视觉的叉车学习系统,实现零样本Sim2Real迁移,无需真实世界数据。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 叉车自动化 深度强化学习 Sim2Real 零样本学习 视觉伺服
📋 核心要点
- 平衡重式叉车应用广泛但自动化程度低,缺乏安全且可验证性能的开发环境是主要挑战。
- 该研究提出一种基于视觉的深度强化学习方法,在数字化环境中学习叉车操作,无需真实数据。
- 通过1/14比例的机器人叉车实验验证,实现了60%的托盘装载成功率,展示了零样本Sim2Real能力。
📝 摘要(中文)
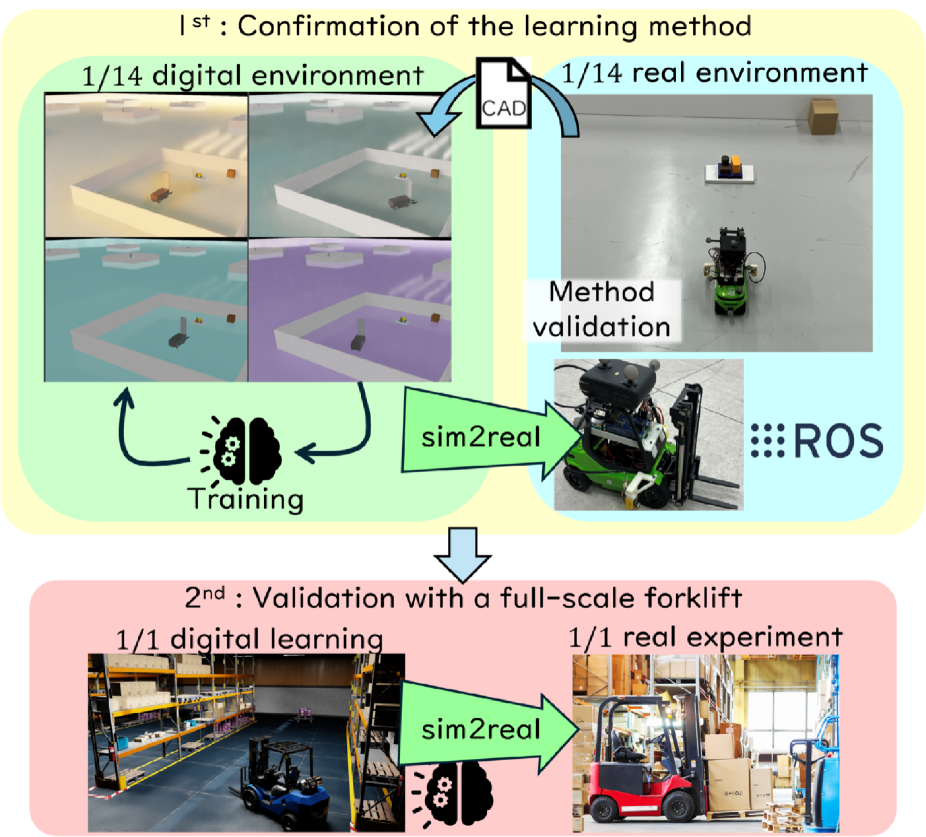
本研究提出了一种学习系统,该系统结合了逼真的数字学习环境和1/14比例的机器人叉车环境,旨在解决叉车自动化问题。受叉车操作员培训方法的启发,我们采用了一种端到端的基于视觉的深度强化学习方法。学习在由CAD数据创建的数字化环境中进行,既安全又无需真实世界数据。此外,我们使用与真实叉车配置相似的1/14比例机器人叉车,在物理环境中安全地验证了该方法。在机器人叉车的托盘装载任务的真实实验中,我们实现了60%的成功率。我们的方法展示了零样本Sim2Real,且无需启发式添加。这种基于学习的方法被认为是平衡重式叉车自动化迈出的第一步。
🔬 方法详解
问题定义:论文旨在解决平衡重式叉车的自动化问题。现有方法依赖于人工规则或需要大量真实世界数据进行训练,成本高昂且难以保证安全性。缺乏一个安全、高效且可验证性能的开发环境是主要痛点。
核心思路:论文的核心思路是利用逼真的数字化环境进行深度强化学习,模拟叉车操作员的培训过程。通过在虚拟环境中学习,避免了真实世界数据采集的风险和成本,同时利用Sim2Real技术将学到的策略迁移到真实机器人叉车上。
技术框架:整体框架包含两个主要部分:一是基于CAD数据构建的逼真数字化学习环境,二是1/14比例的机器人叉车实验平台。在数字化环境中,使用深度强化学习算法训练叉车控制策略。训练完成后,将策略直接部署到机器人叉车上进行验证,实现零样本Sim2Real迁移。
关键创新:最重要的创新点在于实现了零样本Sim2Real,即无需任何真实世界数据或启发式调整,即可将虚拟环境中训练的策略成功应用于真实机器人叉车。这极大地降低了叉车自动化开发的成本和风险。
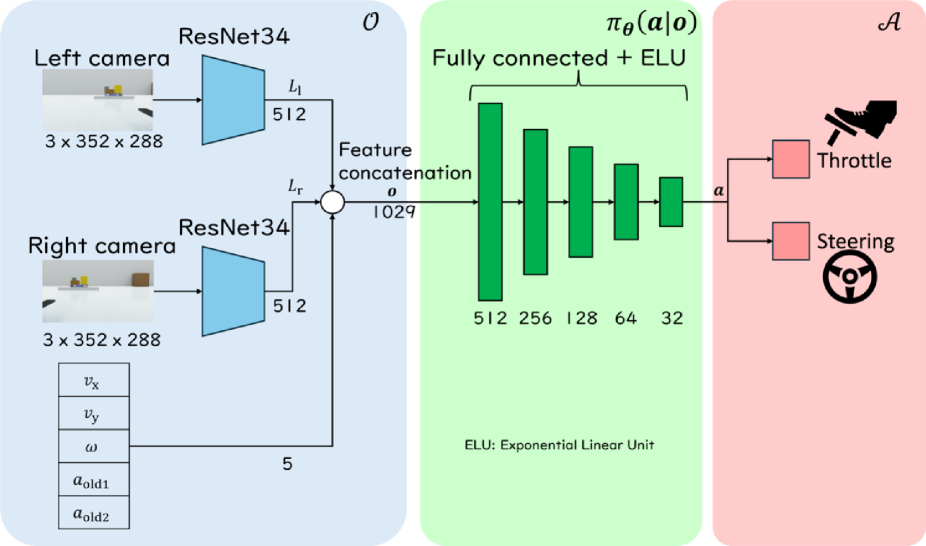
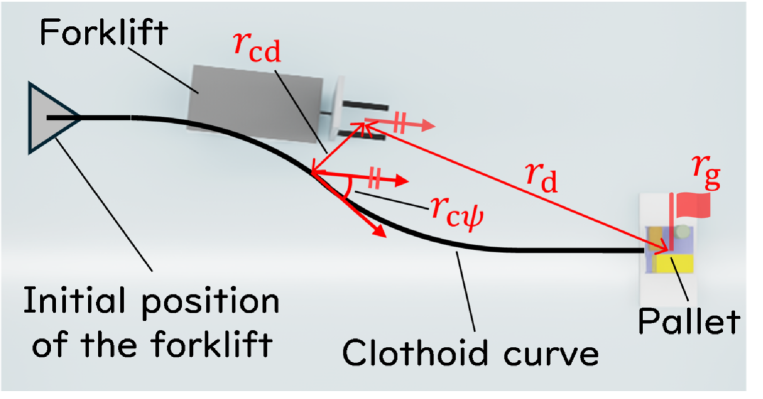
关键设计:论文采用端到端的视觉深度强化学习方法,直接从图像输入学习控制策略。具体的技术细节包括:使用逼真的渲染技术生成虚拟环境图像,选择合适的强化学习算法(具体算法未知),设计奖励函数以鼓励叉车完成托盘装载任务,以及优化网络结构以提高学习效率和泛化能力。具体的网络结构、损失函数和参数设置在论文中可能有所描述,但摘要中未提及。
🖼️ 关键图片
📊 实验亮点
该研究在1/14比例的机器人叉车上进行了真实实验,成功实现了60%的托盘装载成功率。该方法无需任何真实世界数据或启发式调整,即可实现零样本Sim2Real迁移,显著降低了叉车自动化开发的难度和成本。这一结果表明,基于视觉的深度强化学习方法在叉车自动化领域具有巨大的潜力。
🎯 应用场景
该研究成果可应用于各种工业场景中的叉车自动化,例如仓库、工厂和物流中心。通过降低叉车自动化开发的成本和风险,可以提高生产效率、降低人工成本,并改善工作环境的安全性。未来,该方法可以扩展到其他类型的工业机器人和自动化任务。
📄 摘要(原文)
Forklifts are used extensively in various industrial settings and are in high demand for automation. In particular, counterbalance forklifts are highly versatile and employed in diverse scenarios. However, efforts to automate these processes are lacking, primarily owing to the absence of a safe and performance-verifiable development environment. This study proposes a learning system that combines a photorealistic digital learning environment with a 1/14-scale robotic forklift environment to address this challenge. Inspired by the training-based learning approach adopted by forklift operators, we employ an end-to-end vision-based deep reinforcement learning approach. The learning is conducted in a digitalized environment created from CAD data, making it safe and eliminating the need for real-world data. In addition, we safely validate the method in a physical setting utilizing a 1/14-scale robotic forklift with a configuration similar to that of a real forklift. We achieved a 60% success rate in pallet loading tasks in real experiments using a robotic forklift. Our approach demonstrates zero-shot sim2real with a simple method that does not require heuristic additions. This learning-based approach is considered a first step towards the automation of counterbalance forklifts.