SHIFT Planner: Speedy Hybrid Iterative Field and Segmented Trajectory Optimization with IKD-tree for Uniform Lightweight Coverage
作者: Zexuan Fan, Sunchun Zhou, Hengye Yang, Junyi Cai, Ran Cheng, Lige Liu, Tao Sun
分类: cs.RO
发布日期: 2024-12-14 (更新: 2025-04-24)
💡 一句话要点
提出SHIFT Planner,通过混合迭代场和分段轨迹优化实现轻量级均匀覆盖
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 覆盖规划 机器人导航 辐射场 扩散场 语义地图 动态避障 轨迹优化
📋 核心要点
- 现有覆盖规划方法在复杂环境下的适应性和效率方面存在不足,难以实现轻量级和均匀覆盖。
- 论文提出了一种基于辐射场的覆盖规划算法,利用扩散场模型动态调整轨迹和速度,优化覆盖过程。
- 该框架集成了语义地图、自适应覆盖规划、动态避障和精确轨迹跟踪,提升了整体导航性能。
📝 摘要(中文)
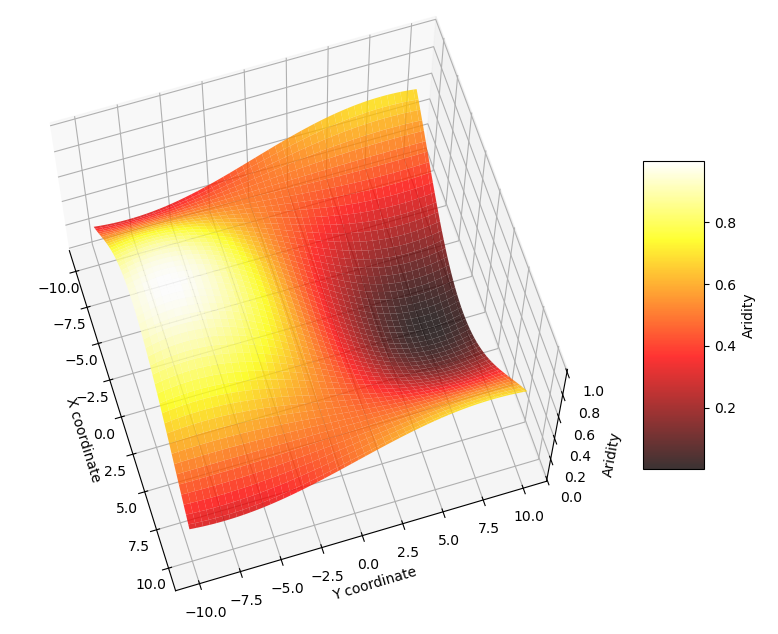
本文介绍了一种综合的规划和导航框架,通过整合语义地图、自适应覆盖规划、动态避障和精确轨迹跟踪来解决现有方法的局限性。该框架首先从单目相机、IMU和GPS对齐的数据中生成全景占据局部语义地图和精确定位信息。这些信息与输入的 terrain 点云或预加载的 terrain 信息相结合,以初始化规划过程。我们提出了一种辐射场信息覆盖规划算法,该算法利用扩散场模型来动态调整机器人的覆盖轨迹和速度,基于环境属性,如脏污度和干燥度。通过使用高斯场对机器人行为的空间影响进行建模,确保了速度优化的均匀覆盖轨迹,同时适应不同的环境条件。
🔬 方法详解
问题定义:现有的覆盖规划方法在复杂环境中难以兼顾覆盖效率和均匀性,尤其是在计算资源受限的平台上。传统方法可能无法根据环境变化动态调整覆盖策略,导致覆盖质量下降或资源浪费。此外,动态避障能力也是一个挑战,需要快速响应并调整规划轨迹。
核心思路:论文的核心思路是利用辐射场模型来指导覆盖规划,将环境属性(如脏污度、干燥度)编码到辐射场中,并根据辐射场的梯度信息动态调整机器人的覆盖轨迹和速度。通过这种方式,可以实现速度优化和均匀覆盖,同时适应不同的环境条件。
技术框架:该框架包含以下主要模块:1) 基于单目相机、IMU和GPS的数据融合,生成全景占据局部语义地图和精确定位信息;2) 辐射场信息覆盖规划算法,利用扩散场模型动态调整覆盖轨迹和速度;3) 动态避障模块,根据环境变化调整轨迹;4) 精确轨迹跟踪模块,确保机器人按照规划轨迹运动。整体流程是从环境感知到轨迹规划,再到运动控制的闭环系统。
关键创新:关键创新在于辐射场信息覆盖规划算法。该算法利用扩散场模型对环境属性进行建模,并根据辐射场的梯度信息动态调整机器人的覆盖轨迹和速度。这种方法能够有效地平衡覆盖效率和均匀性,并适应不同的环境条件。与传统方法相比,该算法能够更好地利用环境信息,实现更智能的覆盖规划。
关键设计:辐射场模型使用高斯场来模拟机器人行为的空间影响。扩散场的参数(如扩散系数)可以根据环境属性进行调整,以控制覆盖范围和速度。损失函数的设计目标是最小化未覆盖区域,同时保证轨迹的平滑性和安全性。具体的参数设置和损失函数形式在论文中应该有详细描述(未知)。
🖼️ 关键图片


📊 实验亮点
论文提出了一种辐射场信息覆盖规划算法,该算法利用扩散场模型来动态调整机器人的覆盖轨迹和速度,基于环境属性,如脏污度和干燥度。通过使用高斯场对机器人行为的空间影响进行建模,确保了速度优化的均匀覆盖轨迹,同时适应不同的环境条件。具体的实验数据和对比基线在摘要中未提及(未知)。
🎯 应用场景
该研究成果可应用于清洁机器人、农业机器人、巡检机器人等领域,实现自主导航和均匀覆盖。例如,清洁机器人可以根据地面脏污程度调整清洁轨迹,提高清洁效率;农业机器人可以根据作物生长情况调整喷洒轨迹,实现精准施肥。该研究具有重要的实际应用价值和广阔的市场前景。
📄 摘要(原文)
This paper introduces a comprehensive planning and navigation framework that address these limitations by integrating semantic mapping, adaptive coverage planning, dynamic obstacle avoidance and precise trajectory tracking. Our framework begins by generating panoptic occupancy local semantic maps and accurate localization information from data aligned between a monocular camera, IMU, and GPS. This information is combined with input terrain point clouds or preloaded terrain information to initialize the planning process. We propose the Radiant Field-Informed Coverage Planning algorithm, which utilizes a diffusion field model to dynamically adjust the robot's coverage trajectory and speed based on environmental attributes such as dirtiness and dryness. By modeling the spatial influence of the robot's actions using a Gaussian field, ensures a speed-optimized, uniform coverage trajectory while adapting to varying environmental conditions.