Advances in Transformers for Robotic Applications: A Review
作者: Nikunj Sanghai, Nik Bear Brown
分类: cs.RO, cs.AI
发布日期: 2024-12-13
备注: Early preprint, focusing primarily on general purpose robots, more updates to come
💡 一句话要点
综述Transformer在机器人领域的应用:聚焦感知、规划、控制与深度强化学习
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人 Transformer 深度学习 感知 规划 控制 深度强化学习 自主系统
📋 核心要点
- 传统神经网络在处理长序列和复杂关系时存在局限性,Transformer的自注意力机制为机器人任务提供了新的可能性。
- 本文核心在于梳理Transformer在机器人感知、规划、控制等关键领域的应用,并分析其与深度强化学习的结合。
- 该综述总结了现有研究成果,并指出了Transformer在机器人领域面临的挑战和未来发展方向,为后续研究提供参考。
📝 摘要(中文)
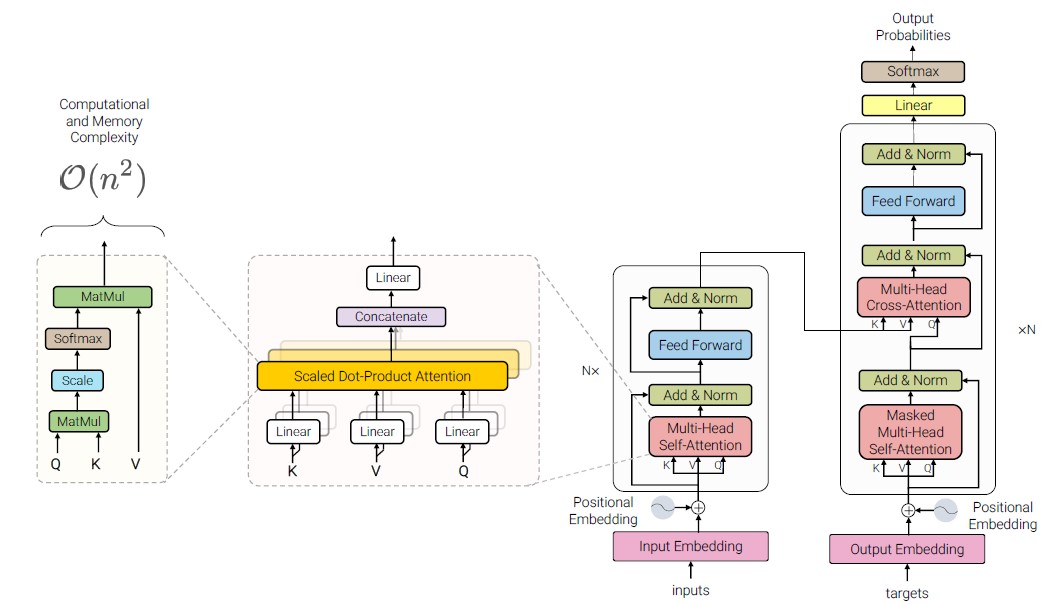
Transformer架构的引入给深度学习(DL)带来了显著的突破,尤其是在自然语言处理(NLP)领域。自问世以来,由于其“自注意力”机制以及在各种应用中的可扩展性,Transformer的表现优于许多传统的神经网络架构。本文综述了Transformer在机器人领域的应用。我们回顾了Transformer架构的最新进展和趋势,并考察了它们在机器人感知、规划和控制中对自主系统的集成。此外,我们回顾了过去的工作和最近的研究,关于Transformer在机器人领域作为预训练基础模型的使用,以及Transformer与深度强化学习(DRL)集成为自主系统。我们讨论了不同的Transformer变体如何在机器人技术中被调整,以实现可靠的规划和感知,增强人机交互,进行长时程决策和泛化。最后,我们讨论了局限性和挑战,为未来的研究方向提供见解和建议。
🔬 方法详解
问题定义:机器人领域面临着感知、规划和控制等复杂任务,传统方法在处理长序列数据、建立全局依赖关系以及实现泛化能力方面存在局限性。Transformer架构在自然语言处理领域的成功激发了人们将其应用于机器人领域的兴趣,但如何有效地将Transformer应用于机器人任务仍然是一个挑战。
核心思路:利用Transformer的自注意力机制来捕捉机器人任务中的长程依赖关系和上下文信息,从而提高感知、规划和控制的性能。通过预训练Transformer模型,可以学习到通用的机器人任务表示,从而实现更好的泛化能力。此外,将Transformer与深度强化学习相结合,可以实现更智能的自主系统。
技术框架:该综述涵盖了Transformer在机器人感知、规划和控制中的应用。在感知方面,Transformer可以用于处理图像、点云等传感器数据,实现目标检测、语义分割等任务。在规划方面,Transformer可以用于生成运动轨迹、决策序列等。在控制方面,Transformer可以用于学习控制策略,实现自主导航、抓取等任务。此外,该综述还讨论了Transformer与深度强化学习的结合,以及Transformer作为预训练基础模型在机器人领域的应用。
关键创新:该综述的关键创新在于系统地梳理了Transformer在机器人领域的应用,并指出了未来的研究方向。与现有方法相比,Transformer能够更好地处理长序列数据、建立全局依赖关系,并实现更好的泛化能力。此外,Transformer与深度强化学习的结合为机器人自主学习提供了新的思路。
关键设计:不同的Transformer变体被应用于机器人领域的不同任务。例如,Vision Transformer (ViT) 被用于图像感知,Transformer-XL 被用于长时程规划,而基于Transformer的Actor-Critic方法被用于深度强化学习。损失函数的设计通常基于具体的任务目标,例如交叉熵损失用于分类任务,均方误差损失用于回归任务。网络结构的设计也需要根据具体的任务进行调整,例如可以添加卷积层来提取局部特征,或者使用多头注意力机制来捕捉不同的依赖关系。
🖼️ 关键图片
📊 实验亮点
该综述总结了大量关于Transformer在机器人领域应用的实验结果。例如,在机器人视觉感知任务中,基于Transformer的模型在目标检测和语义分割方面取得了显著的性能提升,超过了传统的卷积神经网络。在机器人规划任务中,Transformer能够生成更平滑、更有效的运动轨迹。在深度强化学习中,基于Transformer的智能体在复杂环境中表现出更强的适应性和泛化能力。
🎯 应用场景
Transformer在机器人领域的应用具有广泛的潜在应用领域,包括自主导航、智能制造、医疗机器人、服务机器人等。通过提高机器人的感知、规划和控制能力,Transformer可以使机器人更加智能、自主和安全,从而在各个领域发挥更大的作用。未来的影响包括提高生产效率、改善医疗服务、增强人机交互体验等。
📄 摘要(原文)
The introduction of Transformers architecture has brought about significant breakthroughs in Deep Learning (DL), particularly within Natural Language Processing (NLP). Since their inception, Transformers have outperformed many traditional neural network architectures due to their "self-attention" mechanism and their scalability across various applications. In this paper, we cover the use of Transformers in Robotics. We go through recent advances and trends in Transformer architectures and examine their integration into robotic perception, planning, and control for autonomous systems. Furthermore, we review past work and recent research on use of Transformers in Robotics as pre-trained foundation models and integration of Transformers with Deep Reinforcement Learning (DRL) for autonomous systems. We discuss how different Transformer variants are being adapted in robotics for reliable planning and perception, increasing human-robot interaction, long-horizon decision-making, and generalization. Finally, we address limitations and challenges, offering insight and suggestions for future research directions.