Active Semantic Mapping with Mobile Manipulator in Horticultural Environments
作者: Jose Cuaran, Kulbir Singh Ahluwalia, Kendall Koe, Naveen Kumar Uppalapati, Girish Chowdhary
分类: cs.RO
发布日期: 2024-12-13
备注: Preprint (under review)
💡 一句话要点
提出一种高效主动语义地图构建方法,用于园艺环境中的移动操作机器人。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 主动语义地图 移动机器人操作臂 园艺环境 信息增益 视点选择
📋 核心要点
- 语义地图是机器人导航和操作等任务的基础,但在复杂园艺环境中构建精确语义地图仍具挑战。
- 该方法通过概率语义地图驱动的视点选择,结合高效光线投射和考虑语义与遮挡的信息增益函数,实现主动探索。
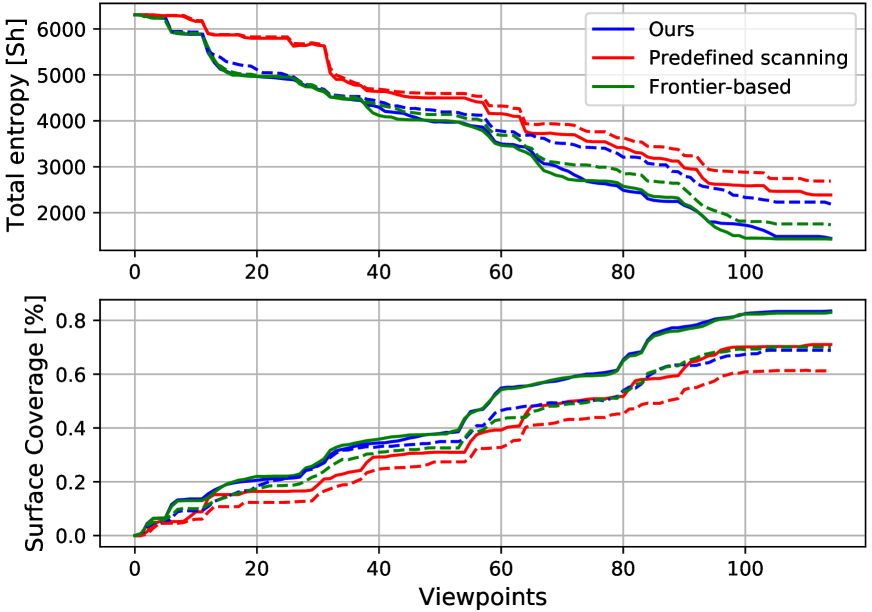
- 实验表明,该方法在降低运行时间、减少多类熵和提高表面覆盖率方面优于现有方法,尤其是在存在分割噪声时。
📝 摘要(中文)
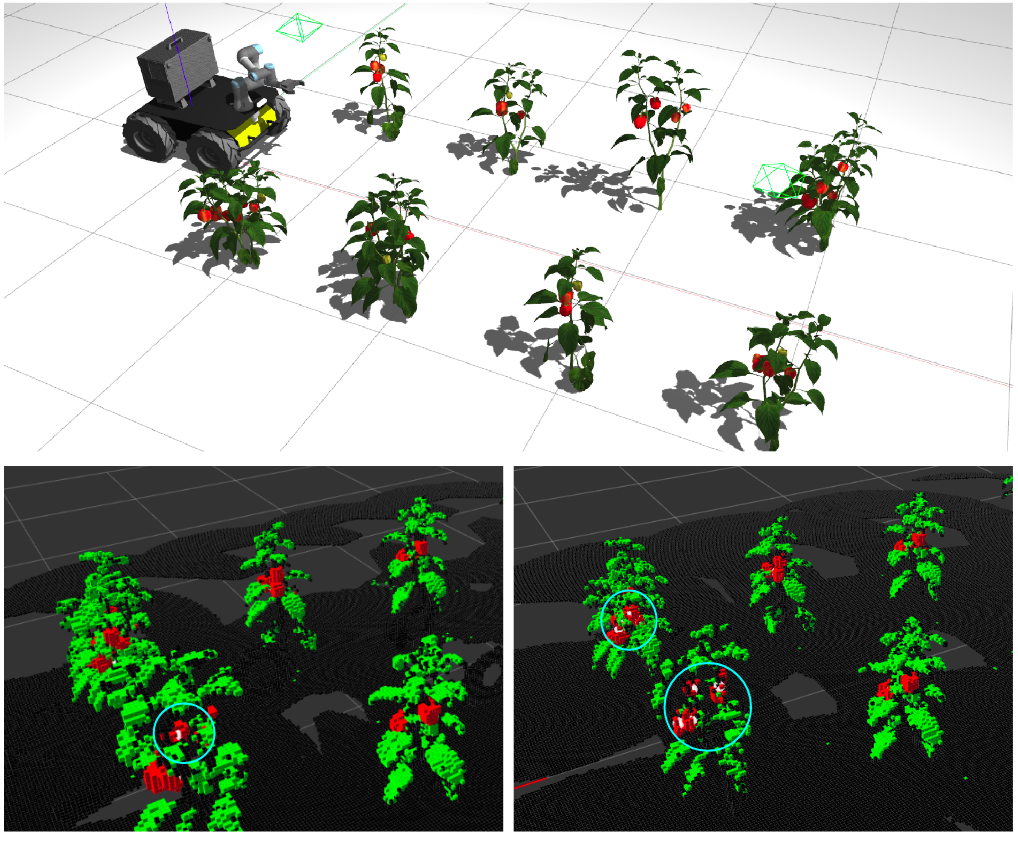
本文提出了一种高效且可扩展的主动语义地图构建方法,用于园艺环境。该方法使用配备RGB-D相机的移动机器人操作臂,利用概率语义地图检测语义目标,生成候选视点,并计算相应的信息增益。提出了一种高效的光线投射策略和一个新颖的信息效用函数,该函数同时考虑了语义信息和遮挡。与之前的基线方法相比,该方法将总运行时间减少了8%。此外,该信息度量在降低多类熵和提高表面覆盖率方面优于其他度量,尤其是在存在分割噪声的情况下。真实世界的实验验证了该方法的有效性,但也揭示了深度传感器噪声和变化的环境条件等挑战,需要进一步研究。
🔬 方法详解
问题定义:在园艺环境中,利用移动机器人操作臂构建精确的语义地图,以便进行导航、操作、产量预测和表型分析。现有方法在处理复杂环境、遮挡和分割噪声方面存在不足,效率有待提高。
核心思路:通过主动选择信息量最大的视点来优化语义地图的构建过程。核心思想是利用概率语义地图来指导视点的选择,并设计一个信息效用函数,该函数同时考虑了语义信息和遮挡情况,从而提高地图构建的效率和精度。
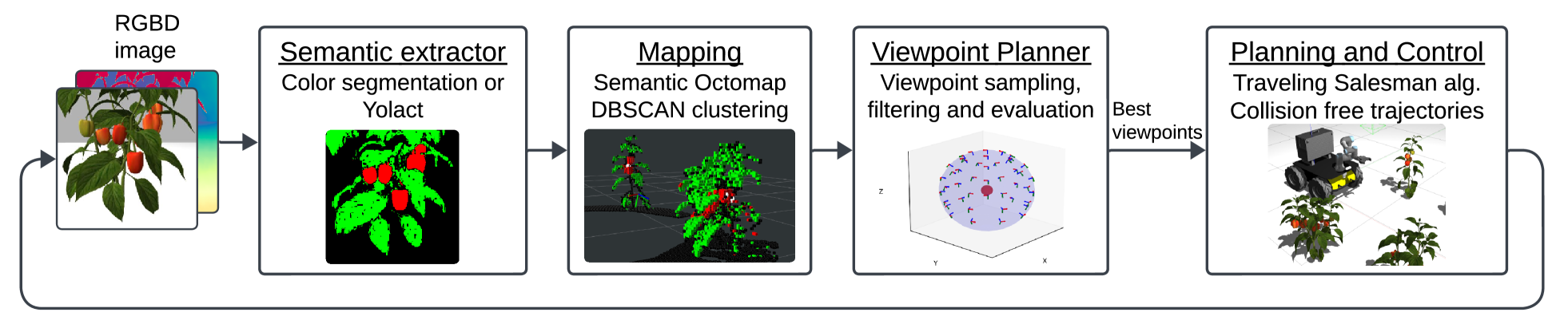
技术框架:该方法包含以下主要模块:1) 语义目标检测:利用RGB-D相机获取环境信息,并使用语义分割算法识别感兴趣的语义目标。2) 候选视点生成:基于当前语义地图,生成一组候选视点,用于下一步的视点选择。3) 信息增益计算:对于每个候选视点,计算其信息增益,该增益反映了从该视点观察可以获得的新的语义信息量。4) 视点选择:选择信息增益最大的视点作为下一个观察位置。5) 地图更新:移动机器人到选定的视点,获取新的观测数据,并更新语义地图。
关键创新:1) 提出了一种高效的光线投射策略,用于快速计算视点的信息增益。2) 设计了一个新颖的信息效用函数,该函数同时考虑了语义信息和遮挡情况,从而更准确地评估视点的信息价值。3) 将主动视点选择与移动机器人操作臂相结合,实现了自主的语义地图构建。
关键设计:信息效用函数的设计是关键。该函数综合考虑了视点能够观察到的新的语义目标的数量、视点与目标之间的距离、以及视点被遮挡的程度。具体来说,该函数可以表示为:U(v) = Σ [P(s|v) * (1 - O(v, s))],其中U(v)表示视点v的信息效用,P(s|v)表示从视点v观察到语义目标s的概率,O(v, s)表示视点v观察到语义目标s的遮挡程度。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在园艺环境中能够有效地构建语义地图。与之前的基线方法相比,该方法将总运行时间减少了8%。此外,该信息度量在降低多类熵和提高表面覆盖率方面优于其他度量,尤其是在存在分割噪声的情况下。例如,在特定实验场景中,该方法的多类熵降低了15%,表面覆盖率提高了10%。
🎯 应用场景
该研究成果可应用于精准农业、智能温室、果园管理等领域。通过构建精确的语义地图,机器人可以自主地进行作物监测、病虫害防治、采摘等任务,从而提高农业生产效率和质量。此外,该方法还可以扩展到其他需要自主地图构建的场景,如室内服务机器人、灾害救援等。
📄 摘要(原文)
Semantic maps are fundamental for robotics tasks such as navigation and manipulation. They also enable yield prediction and phenotyping in agricultural settings. In this paper, we introduce an efficient and scalable approach for active semantic mapping in horticultural environments, employing a mobile robot manipulator equipped with an RGB-D camera. Our method leverages probabilistic semantic maps to detect semantic targets, generate candidate viewpoints, and compute corresponding information gain. We present an efficient ray-casting strategy and a novel information utility function that accounts for both semantics and occlusions. The proposed approach reduces total runtime by 8% compared to previous baselines. Furthermore, our information metric surpasses other metrics in reducing multi-class entropy and improving surface coverage, particularly in the presence of segmentation noise. Real-world experiments validate our method's effectiveness but also reveal challenges such as depth sensor noise and varying environmental conditions, requiring further research.