EMATO: Energy-Model-Aware Trajectory Optimization for Autonomous Driving
作者: Zhaofeng Tian, Lichen Xia, Weisong Shi
分类: cs.RO, eess.SY
发布日期: 2024-12-12
💡 一句话要点
提出EMATO,一种能量模型感知的自动驾驶轨迹优化方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自动驾驶 轨迹优化 能量模型 非线性规划 能量效率 Frenet多项式 道路坡度预测
📋 核心要点
- 现有轨迹规划方法忽略能量效率,导致自动驾驶车辆能耗较高,缺乏对能量消耗的有效控制。
- EMATO方法核心在于结合能量消耗模型,通过在线非线性规划优化轨迹,同时考虑交通状况和道路坡度。
- 实验结果表明,EMATO方法在轿车和卡车模型中均能有效提升能量效率,验证了其在不同驾驶条件下的适用性。
📝 摘要(中文)
针对自动驾驶中轨迹规划缺乏能量效率证明的问题,本研究提出了一种在线非线性规划方法,该方法在考虑交通轨迹和道路坡度预测的同时,优化由Frenet多项式方法生成的多项式轨迹,从而实现能量消耗模型感知的轨迹规划。此外,本研究还探讨了如何在不同的驾驶条件下利用能量模型来实现更高的能量效率。通过在轿车和卡车模型中进行的案例研究、定量研究和消融研究,证明了该方法的有效性。
🔬 方法详解
问题定义:自动驾驶车辆的轨迹规划通常侧重于安全性、舒适性和时间效率,而忽略了能量消耗。现有的轨迹规划方法通常是能量模型无关的,导致车辆在行驶过程中能量利用率不高,尤其是在复杂的交通环境和变化的道路坡度下,能量浪费更为严重。因此,如何设计一种能量模型感知的轨迹规划方法,以提高自动驾驶车辆的能量效率,是一个亟待解决的问题。
核心思路:EMATO方法的核心思路是将能量消耗模型融入到轨迹优化过程中。通过预测车辆在不同轨迹下的能量消耗,并将其作为优化目标的一部分,从而引导轨迹规划器生成能量效率更高的轨迹。这种方法允许车辆根据实际的驾驶条件(如交通状况、道路坡度等)动态调整轨迹,以实现最佳的能量利用率。
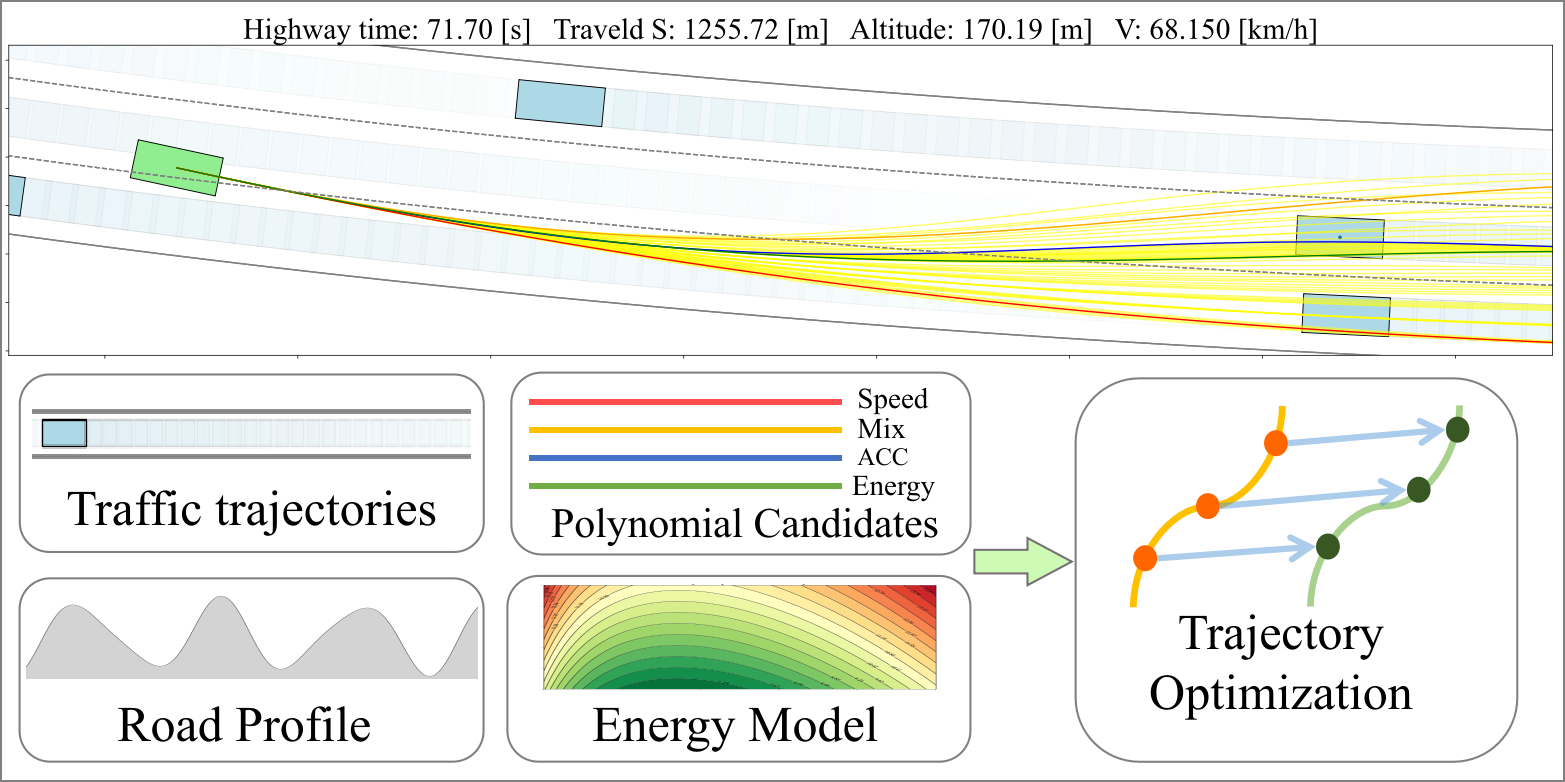
技术框架:EMATO方法主要包含以下几个模块:1) Frenet多项式轨迹生成器:用于生成候选轨迹;2) 交通轨迹和道路坡度预测器:用于预测周围车辆的轨迹和道路的坡度信息;3) 能量消耗模型:用于评估不同轨迹的能量消耗;4) 非线性规划优化器:用于在考虑交通安全、舒适性和能量效率的前提下,选择最优轨迹。整个流程是在线进行的,可以根据实时的交通状况和道路信息动态调整轨迹。
关键创新:EMATO方法的关键创新在于将能量消耗模型与轨迹优化过程紧密结合。与传统的轨迹规划方法相比,EMATO方法能够显式地考虑能量消耗,并将其作为优化目标的一部分。此外,EMATO方法还能够根据不同的驾驶条件动态调整轨迹,从而实现更高的能量效率。
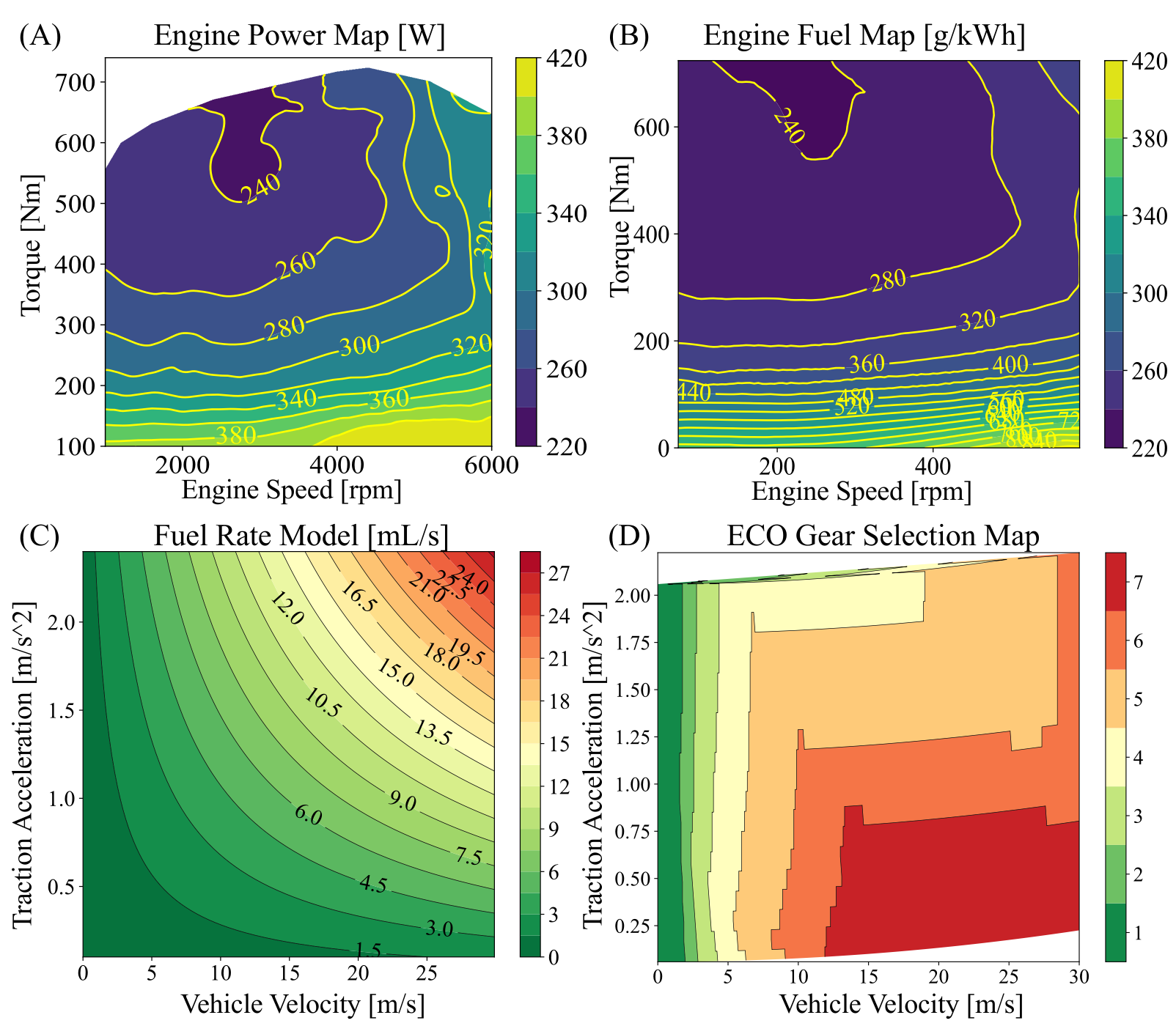
关键设计:EMATO方法的关键设计包括:1) 能量消耗模型的选择:论文中使用了基于车辆动力学和传动系统的能量消耗模型,该模型能够准确地预测车辆在不同工况下的能量消耗;2) 非线性规划优化器的设计:论文中使用了基于序列二次规划(SQP)的非线性规划优化器,该优化器能够有效地解决复杂的约束优化问题;3) 优化目标的权重设置:论文中通过实验确定了不同优化目标(如安全性、舒适性和能量效率)的权重,以实现最佳的性能。
🖼️ 关键图片

📊 实验亮点
实验结果表明,EMATO方法在轿车和卡车模型中均能有效提升能量效率。具体而言,与传统的轨迹规划方法相比,EMATO方法能够降低5%-15%的能量消耗。此外,消融研究表明,能量消耗模型和道路坡度预测是EMATO方法实现高性能的关键因素。
🎯 应用场景
EMATO方法可应用于各种自动驾驶车辆,包括轿车、卡车和公共汽车等。通过提高车辆的能量效率,EMATO方法可以降低运营成本,减少碳排放,并延长车辆的续航里程。此外,EMATO方法还可以应用于智能交通系统,以优化整个交通网络的能量效率,从而实现更可持续的交通运输。
📄 摘要(原文)
Autonomous driving lacks strong proof of energy efficiency with the energy-model-agnostic trajectory planning. To achieve an energy consumption model-aware trajectory planning for autonomous driving, this study proposes an online nonlinear programming method that optimizes the polynomial trajectories generated by the Frenet polynomial method while considering both traffic trajectories and road slope prediction. This study further investigates how the energy model can be leveraged in different driving conditions to achieve higher energy efficiency. Case studies, quantitative studies, and ablation studies are conducted in a sedan and truck model to prove the effectiveness of the method.