Bilevel Learning for Dual-Quadruped Collaborative Transportation under Kinematic and Anisotropic Velocity Constraints
作者: Williard Joshua Jose, Hao Zhang
分类: cs.RO
发布日期: 2024-12-11
备注: 8 pages, 5 figures, project website: https://hcrlab.gitlab.io/project/blct
💡 一句话要点
提出双足四足机器人协同运输的分层学习方法,解决运动学和速度约束下的负载运输问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 协同运输 分层学习 强化学习 运动规划 机器人控制 各向异性速度约束
📋 核心要点
- 现有方法难以处理四足机器人协同运输中各向异性速度约束带来的挑战,尤其是在复杂环境中。
- 论文提出分层学习方法,上层学习团队协作策略,下层优化个体机器人速度,从而实现协同运输。
- 实验结果表明,该方法在复杂场景中表现优异,能够有效提升双四足机器人协同运输的性能。
📝 摘要(中文)
多机器人协同运输是一项重要的能力,近年来受到了广泛关注。为了可靠地运输受运动学约束的负载,机器人团队必须紧密协作并协调各自的速度,以实现所需的负载运动。对于四足机器人,一个关键挑战是其各向异性速度限制,即前后运动比横向运动更快更稳定。为了实现双四足机器人协同运输并解决上述挑战,我们提出了一种新的协同运输分层学习(BLCT)方法。在上层,BLCT学习两个四足机器人将负载移动到目标位置的团队协作策略,同时考虑它们与负载连接所施加的运动学约束。在下层,BLCT优化每个机器人的速度控制,以紧密遵循协作策略,同时满足各向异性速度约束并避开障碍物。实验表明,我们的BLCT方法能够很好地实现具有挑战性场景中的协同运输,并且优于基线方法。
🔬 方法详解
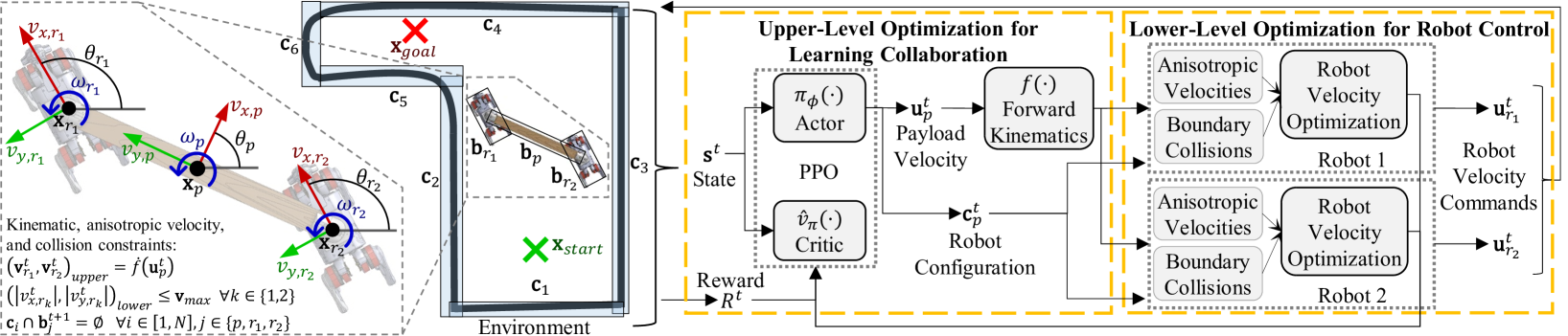
问题定义:论文旨在解决双四足机器人协同运输中,由于机器人运动学约束和各向异性速度限制(例如,前后运动比侧向运动更稳定快速)而导致的运动规划和控制难题。现有方法通常难以同时满足负载的运动学约束和机器人的速度约束,尤其是在存在障碍物的复杂环境中。这导致协同运输的效率和稳定性降低。
核心思路:论文的核心思路是将协同运输问题分解为两个层次进行学习。上层学习一个团队协作策略,指导两个机器人如何协同移动负载到目标位置,同时考虑负载的运动学约束。下层则针对每个机器人,优化其速度控制,使其尽可能地遵循上层策略,同时满足自身的各向异性速度约束并避开障碍物。这种分层结构能够有效地解耦协作策略和个体控制,简化学习过程。
技术框架:BLCT方法采用分层学习框架。上层使用强化学习算法(具体算法未知)学习团队协作策略,输入是环境状态(例如,负载位置、目标位置、障碍物位置),输出是期望的负载运动。下层使用优化方法(具体方法未知)为每个机器人生成速度控制指令,输入是上层策略给出的期望负载运动和机器人的当前状态,输出是机器人的关节速度。上下层之间通过某种方式进行信息传递和协调,以保证整体协同运输的性能。
关键创新:该方法最重要的创新点在于将协同运输问题建模为分层学习问题,并针对四足机器人的各向异性速度约束进行了专门设计。通过上层学习协作策略,下层优化个体控制,实现了全局协作和局部约束的有效结合。这种分层结构使得学习过程更加高效,并且能够更好地适应复杂环境。
关键设计:论文中关于具体参数设置、损失函数和网络结构的细节未知。但可以推测,上层强化学习可能使用了某种奖励函数来鼓励机器人协同移动负载到目标位置,并惩罚违反运动学约束和碰撞的行为。下层优化可能使用了某种代价函数来衡量机器人速度与期望速度的偏差,并惩罚违反速度约束和碰撞的行为。上下层之间可能通过某种方式共享信息,例如,上层策略可以提供下层优化所需的参考轨迹。
🖼️ 关键图片

📊 实验亮点
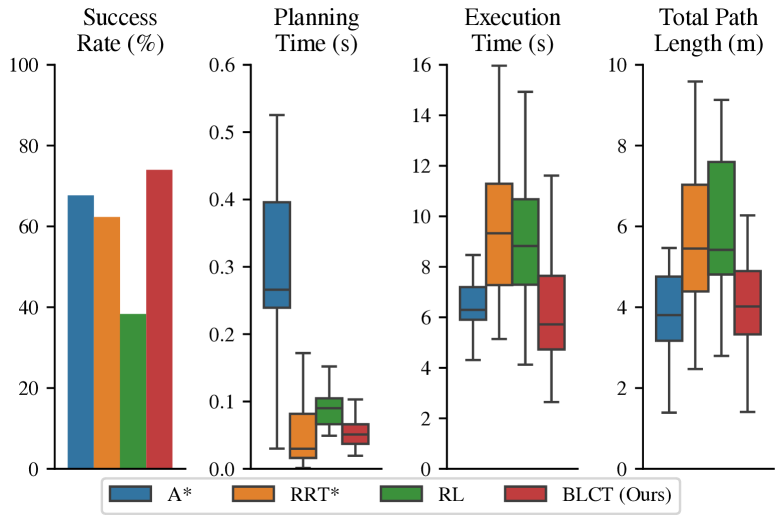
论文通过实验验证了BLCT方法在复杂场景下的有效性。实验结果表明,BLCT方法能够成功地引导双四足机器人协同运输负载到目标位置,并且能够有效地避开障碍物。与基线方法相比,BLCT方法在运输效率和稳定性方面均有显著提升,但具体性能数据和提升幅度未知。
🎯 应用场景
该研究成果可应用于复杂环境下的物流运输、灾难救援、建筑施工等领域。双四足机器人协同运输能够有效地搬运重物或大型物体,尤其是在人类难以到达或操作的场景中。未来,该技术有望进一步扩展到更多机器人协同的场景,实现更高效、更智能的自动化作业。
📄 摘要(原文)
Multi-robot collaborative transportation is a critical capability that has attracted significant attention over recent years. To reliably transport a kinematically constrained payload, a team of robots must closely collaborate and coordinate their individual velocities to achieve the desired payload motion. For quadruped robots, a key challenge is caused by their anisotropic velocity limits, where forward and backward movement is faster and more stable than lateral motion. In order to enable dual-quadruped collaborative transportation and address the above challenges, we propose a novel Bilevel Learning for Collaborative Transportation (BLCT) approach. In the upper-level, BLCT learns a team collaboration policy for the two quadruped robots to move the payload to the goal position, while accounting for the kinematic constraints imposed by their connection to the payload. In the lower-level, BLCT optimizes velocity controls of each individual robot to closely follow the collaboration policy while satisfying the anisotropic velocity constraints and avoiding obstacles. Experiments demonstrate that our BLCT approach well enables collaborative transportation in challenging scenarios and outperforms baseline approaches.