Grasping by parallel shape matching
作者: Wenzheng Zhang, Fahira Afzal Maken, Tin Lai, Fabio Ramos
分类: cs.RO
发布日期: 2024-12-11
期刊: ACRA 2024: Australasian Conference on Robotics and Automation, November 2024, Auckland, New Zealand
💡 一句话要点
提出基于并行形状匹配的抓取方法,提升机器人抓取的鲁棒性和效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人抓取 形状匹配 迭代最近点 并行计算 碰撞检测
📋 核心要点
- 传统抓取方法优化时间长,数据驱动方法泛化性差,难以应对未见过的物体。
- 将抓取问题转化为夹具与物体的刚性形状匹配,利用AS-ICP算法并行优化。
- 实验表明,该方法在多种物体和场景下实现了较高的抓取成功率和较低的计算时间。
📝 摘要(中文)
本文提出了一种基于并行形状匹配的机器人抓取方法,旨在解决物体和夹具多样性以及现实世界复杂性带来的抓取挑战。该方法将抓取问题建模为夹具和物体之间的刚性形状匹配,利用退火斯坦迭代最近点(AS-ICP)算法进行优化,并采用基于GPU的并行化加速。通过将夹具的工具中心点和物体的质心纳入代价函数,并使用夹具的符号距离场进行碰撞检测,该方法实现了鲁棒且计算时间短的抓取。使用Kinova KG3夹具的实验表明,该方法在各种物体和设置下实现了87.3%的成功率和0.926秒的计算时间,突显了其在实际应用中的潜力。
🔬 方法详解
问题定义:论文旨在解决机器人抓取任务中,由于物体和夹具的多样性以及真实环境的复杂性,导致传统解析方法计算耗时,数据驱动方法泛化能力不足的问题。现有方法难以在保证抓取成功率的同时,实现快速的抓取规划。
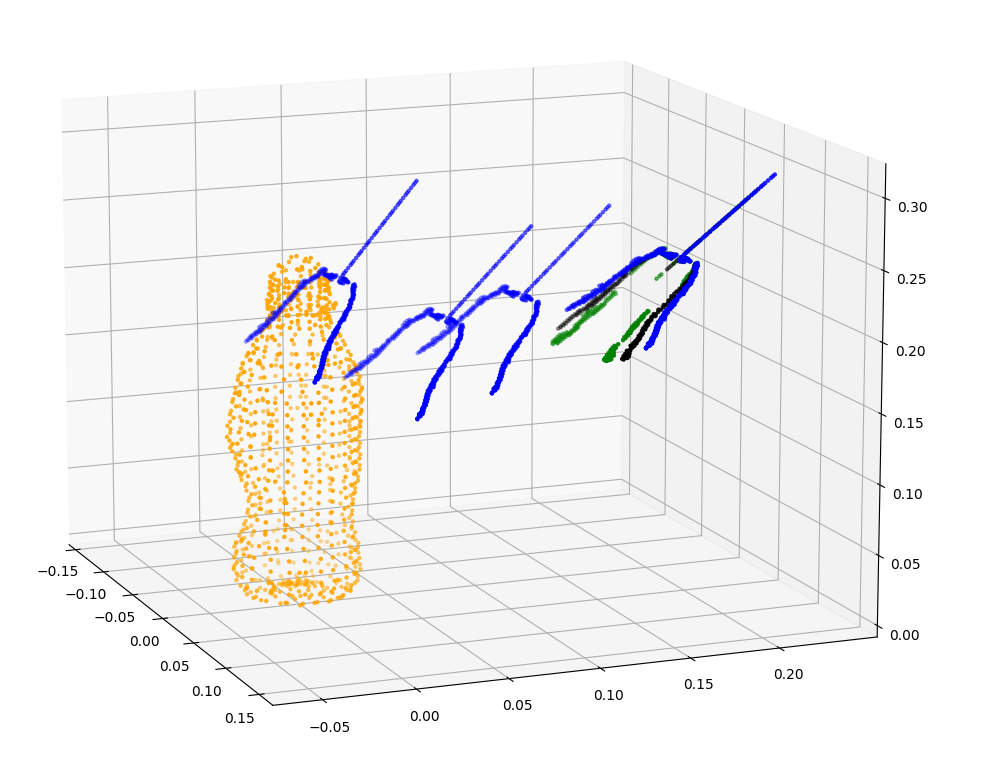
核心思路:论文的核心思路是将抓取问题建模为夹具和物体之间的刚性形状匹配问题。通过优化夹具和物体之间的位姿关系,使得夹具能够以最佳姿态抓取物体。这种方法避免了复杂的力学建模和优化,简化了抓取规划过程。
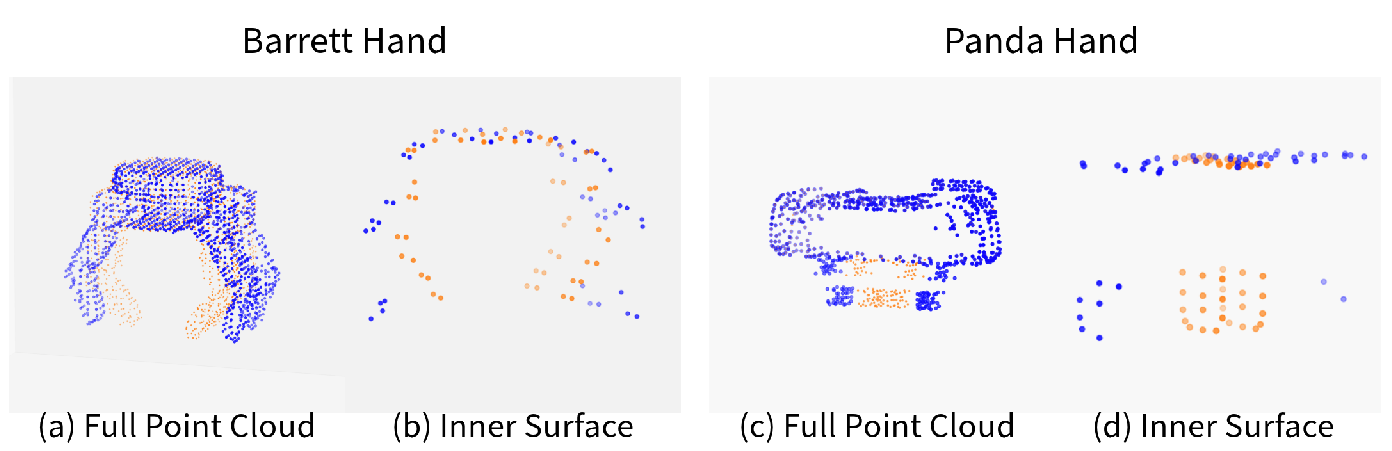
技术框架:该方法主要包含以下几个阶段:1) 输入物体和夹具的三维模型;2) 构建夹具的符号距离场;3) 使用退火斯坦迭代最近点(AS-ICP)算法进行形状匹配,优化夹具的位姿;4) 利用夹具的符号距离场进行碰撞检测,确保抓取过程无碰撞;5) 输出抓取位姿。
关键创新:该方法最重要的创新点在于将抓取问题转化为刚性形状匹配问题,并利用AS-ICP算法进行优化。此外,该方法还结合了夹具的工具中心点和物体的质心信息,以及符号距离场进行碰撞检测,从而提高了抓取的鲁棒性和效率。与传统方法相比,该方法避免了复杂的力学建模和优化,降低了计算复杂度。
关键设计:代价函数的设计是关键。代价函数包含三部分:夹具和物体之间的距离、夹具工具中心点与物体质心之间的距离、以及碰撞惩罚项。AS-ICP算法的退火策略也至关重要,它能够帮助算法跳出局部最优解。此外,GPU并行化加速也显著降低了计算时间。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在使用Kinova KG3夹具时,在各种物体和设置下实现了87.3%的抓取成功率,平均计算时间为0.926秒。这些数据表明,该方法在保证较高抓取成功率的同时,能够实现快速的抓取规划,具有实际应用价值。与现有方法相比,该方法在计算效率和鲁棒性方面均有显著提升。
🎯 应用场景
该研究成果可应用于工业自动化、物流分拣、家庭服务机器人等领域。通过快速、鲁棒的抓取规划,机器人能够更好地完成各种操作任务,提高生产效率和服务质量。未来,该方法有望进一步扩展到更复杂的环境和物体,实现更智能化的机器人操作。
📄 摘要(原文)
Grasping is essential in robotic manipulation, yet challenging due to object and gripper diversity and real-world complexities. Traditional analytic approaches often have long optimization times, while data-driven methods struggle with unseen objects. This paper formulates the problem as a rigid shape matching between gripper and object, which optimizes with Annealed Stein Iterative Closest Point (AS-ICP) and leverages GPU-based parallelization. By incorporating the gripper's tool center point and the object's center of mass into the cost function and using a signed distance field of the gripper for collision checking, our method achieves robust grasps with low computational time. Experiments with the Kinova KG3 gripper show an 87.3% success rate and 0.926 s computation time across various objects and settings, highlighting its potential for real-world applications.