RRT-GPMP2: A Motion Planner for Mobile Robots in Complex Maze Environments
作者: Jiawei Meng, Danail Stoyanov
分类: cs.RO
发布日期: 2024-12-10
备注: 12 pages, 9 figures
💡 一句话要点
提出RRT-GPMP2算法,解决复杂迷宫环境中移动机器人的运动规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 移动机器人 复杂环境 RRT GPMP2 路径优化 迷宫环境
📋 核心要点
- 复杂迷宫环境对移动机器人的运动规划构成挑战,现有方法难以兼顾效率和安全性。
- RRT-GPMP2结合了RRT的快速探索能力和GPMP2的轨迹优化能力,提升规划效率和轨迹质量。
- 通过仿真实验和虚拟场景验证,表明RRT-GPMP2在复杂迷宫环境中具有良好的性能和实用性。
📝 摘要(中文)
随着科技的发展,移动机器人在新一轮世界变革中扮演着重要的角色。为了提高移动机器人的自动化程度,需要集成先进的运动规划器来应对各种环境。复杂的迷宫环境是各种移动机器人潜在应用场景中常见的。本文提出了一种新的运动规划器,名为基于快速探索随机树的高斯过程运动规划器2(RRT-GPMP2),旨在解决复杂迷宫环境中移动机器人的运动规划问题。具体来说,该运动规划器成功地结合了轨迹优化运动规划算法高斯过程运动规划器2和基于采样的运动规划算法快速探索随机树的优点。为了验证所提出的运动规划器的性能和实用性,我们在Matrix laboratory中进行了一些仿真测试,并在机器人操作系统中的虚拟场景中将其应用于海洋移动机器人。
🔬 方法详解
问题定义:论文旨在解决移动机器人在复杂迷宫环境中的运动规划问题。现有方法,如传统的RRT算法,虽然能够快速探索空间,但生成的路径往往不够平滑,需要后处理优化。而GPMP2等轨迹优化算法虽然能生成高质量轨迹,但在复杂环境中容易陷入局部最优,难以快速找到可行解。
核心思路:论文的核心思路是将RRT的全局探索能力与GPMP2的局部优化能力相结合。RRT负责快速探索环境,找到初始的可行路径,GPMP2则负责对RRT生成的路径进行优化,使其更加平滑、安全,并满足机器人的运动学约束。
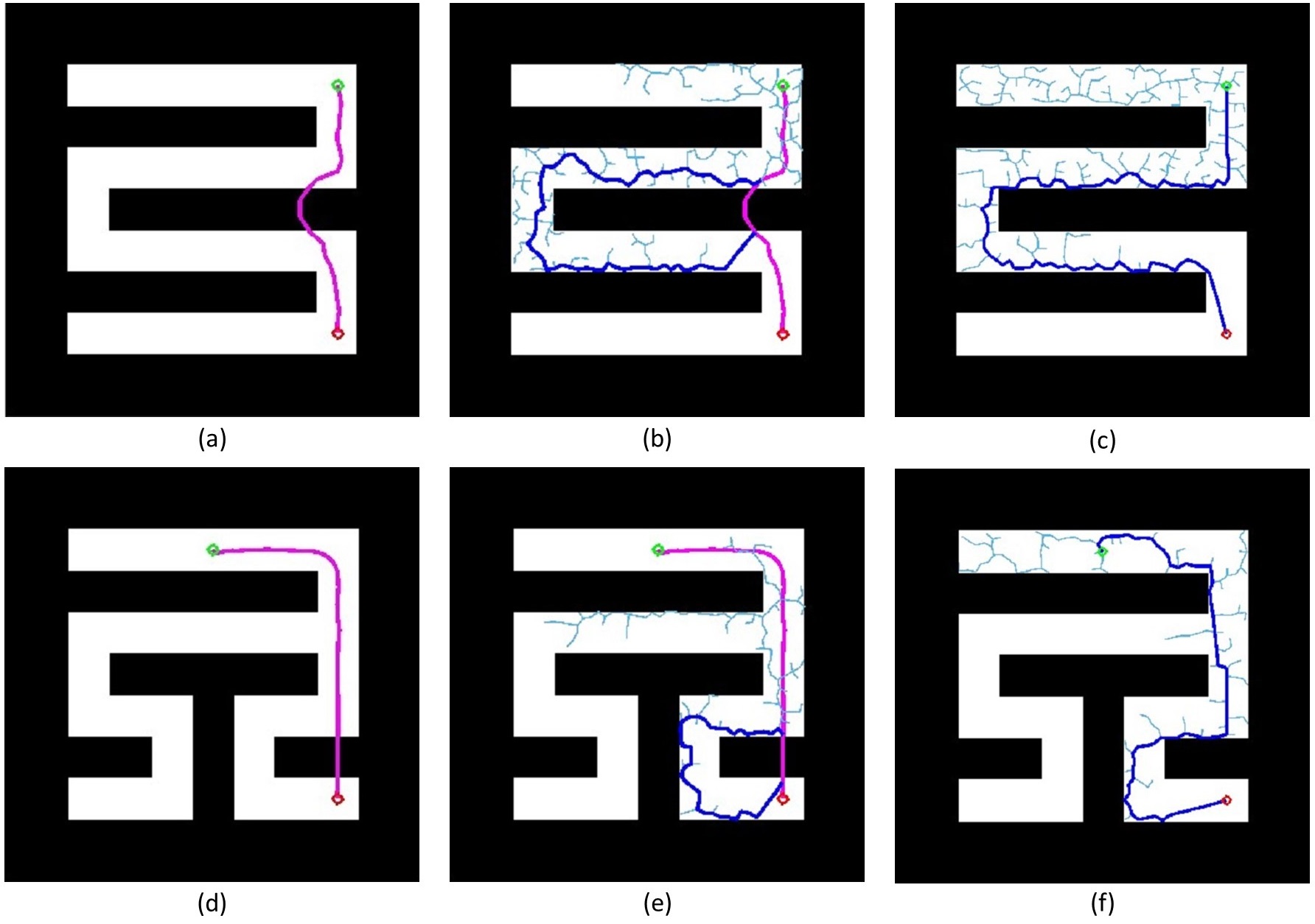
技术框架:RRT-GPMP2算法的整体流程如下:1. 使用RRT算法在环境中进行采样和扩展,构建一棵搜索树,直到找到一条连接起始点和目标点的路径。2. 将RRT生成的初始路径作为GPMP2的初始猜测。3. 使用GPMP2对初始路径进行优化,通过迭代优化轨迹点的位置,使其满足运动学约束,并尽可能远离障碍物。4. 如果优化后的路径满足要求(例如,路径长度小于阈值,与障碍物的距离大于安全距离),则返回该路径;否则,返回到RRT阶段,继续探索。
关键创新:RRT-GPMP2的关键创新在于将采样算法RRT和优化算法GPMP2有效地结合起来。RRT提供了一个良好的初始解,避免了GPMP2陷入局部最优,而GPMP2则提高了路径的质量。这种混合方法能够充分利用两种算法的优点,从而在复杂环境中实现高效、可靠的运动规划。
关键设计:论文中未明确给出关键参数设置和损失函数等技术细节,具体实现可能依赖于GPMP2的现有实现。可能需要调整RRT的采样策略,例如,增加朝向目标点的采样概率,以提高搜索效率。GPMP2的优化目标通常包括路径长度、平滑度、与障碍物的距离等。具体权重需要根据实际应用场景进行调整。
🖼️ 关键图片


📊 实验亮点
论文通过在Matrix laboratory中进行仿真实验,验证了RRT-GPMP2算法的性能。此外,还在机器人操作系统中的虚拟场景中,将该算法应用于海洋移动机器人,进一步验证了其在实际应用中的可行性。虽然论文中没有给出具体的性能数据和对比基线,但实验结果表明,RRT-GPMP2算法能够在复杂迷宫环境中生成安全、平滑的运动轨迹。
🎯 应用场景
RRT-GPMP2算法可应用于各种需要在复杂迷宫环境中进行运动规划的移动机器人,例如:仓库机器人、搜救机器人、医疗机器人和海洋移动机器人。该算法能够提高机器人在复杂环境中的自主导航能力,降低人工干预的需求,具有重要的实际应用价值。未来,该算法可以进一步扩展到多机器人协同运动规划、动态环境下的运动规划等领域。
📄 摘要(原文)
With the development of science and technology, mobile robots are playing a significant important role in the new round of world revolution. Further, mobile robots might assist or replace human beings in a great number of areas. To increase the degree of automation for mobile robots, advanced motion planners need to be integrated into them to cope with various environments. Complex maze environments are common in the potential application scenarios of different mobile robots. This article proposes a novel motion planner named the rapidly exploring random tree based Gaussian process motion planner 2, which aims to tackle the motion planning problem for mobile robots in complex maze environments. To be more specific, the proposed motion planner successfully combines the advantages of a trajectory optimisation motion planning algorithm named the Gaussian process motion planner 2 and a sampling-based motion planning algorithm named the rapidly exploring random tree. To validate the performance and practicability of the proposed motion planner, we have tested it in several simulations in the Matrix laboratory and applied it on a marine mobile robot in a virtual scenario in the Robotic operating system.