ManiSkill-HAB: A Benchmark for Low-Level Manipulation in Home Rearrangement Tasks
作者: Arth Shukla, Stone Tao, Hao Su
分类: cs.RO, cs.AI, cs.CV, cs.LG
发布日期: 2024-12-09 (更新: 2025-02-28)
💡 一句话要点
ManiSkill-HAB:用于家庭重排任务中低级操作的基准测试
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 家庭重排 强化学习 模仿学习 GPU加速 基准测试 轨迹过滤
📋 核心要点
- 现有具身智能基准测试在仿真速度、环境复杂性和数据集规模方面存在局限性,阻碍了复杂操作任务的研究进展。
- MS-HAB通过GPU加速的HAB环境、强化学习和模仿学习基线以及规则驱动的轨迹过滤系统,提供了一个全面的解决方案。
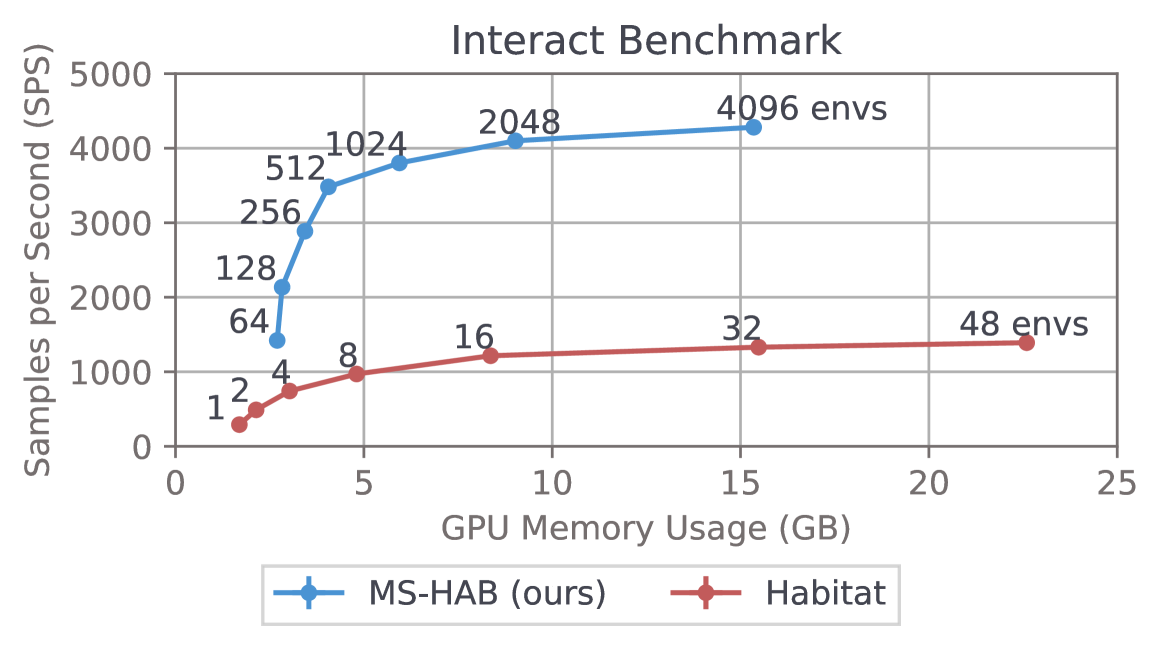
- 该基准在低级控制方面实现了3倍以上的速度提升,并支持高效、可控的大规模数据生成,为后续研究奠定基础。
📝 摘要(中文)
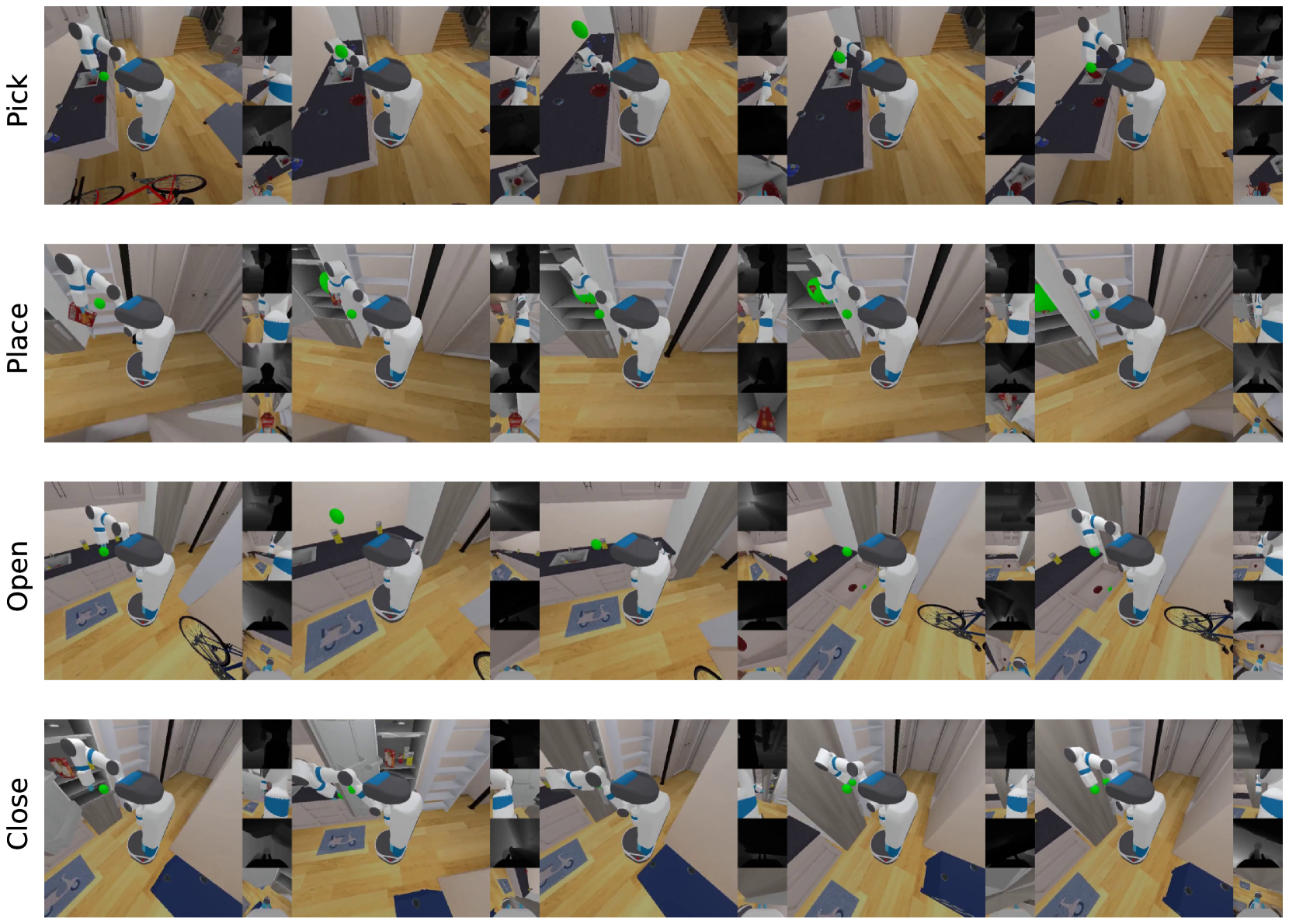
高质量的基准测试是具身智能研究的基础,能够显著推动长时程导航、操作和重排任务的发展。然而,随着机器人技术的前沿任务变得越来越复杂,它们需要更快的仿真速度、更复杂的测试环境和更大的演示数据集。为此,我们提出了MS-HAB,这是一个用于低级操作和家庭物体重排的整体基准。首先,我们提供了Home Assistant Benchmark (HAB)的GPU加速实现。我们支持逼真的低级控制,并以远低于GPU内存使用量实现了比之前的魔法抓取实现快3倍以上的速度。其次,我们训练了广泛的强化学习(RL)和模仿学习(IL)基线,供未来的工作进行比较。最后,我们开发了一个基于规则的轨迹过滤系统,从我们的RL策略中采样特定的演示,这些演示符合预定义的机器人行为和安全标准。将演示过滤与我们的快速环境相结合,可以实现高效、可控的大规模数据生成。
🔬 方法详解
问题定义:论文旨在解决家庭环境中机器人进行物体重排任务时,现有仿真环境速度慢、内存占用高,以及缺乏大规模高质量演示数据的问题。现有方法在处理复杂环境和长时间序列任务时效率低下,难以支持强化学习和模仿学习算法的训练。
核心思路:论文的核心思路是构建一个GPU加速的仿真环境,提高仿真速度并降低内存占用,同时利用强化学习训练策略,并通过规则过滤生成高质量的演示数据。通过软硬件协同优化,提升数据生成效率和质量。
技术框架:MS-HAB基准测试包含三个主要组成部分:1) GPU加速的HAB环境,用于快速仿真和低级控制;2) 强化学习和模仿学习基线,用于提供参考性能和训练策略;3) 基于规则的轨迹过滤系统,用于从强化学习策略中提取高质量的演示数据。整体流程是先在加速环境中训练RL策略,然后利用规则过滤系统筛选出符合特定行为和安全标准的轨迹,最终生成可用于模仿学习的演示数据集。
关键创新:该论文的关键创新在于GPU加速的HAB环境和基于规则的轨迹过滤系统。GPU加速显著提升了仿真速度,使得大规模强化学习训练成为可能。轨迹过滤系统能够有效地从RL策略中提取高质量的演示数据,避免了人工标注的成本和偏差。
关键设计:GPU加速的HAB环境使用了CUDA进行并行计算,优化了物理引擎和渲染流程,从而提高了仿真速度并降低了内存占用。轨迹过滤系统则根据预定义的规则(例如,机器人末端执行器的速度、加速度、与物体的距离等)对RL策略生成的轨迹进行筛选,只保留符合安全和行为标准的轨迹。
🖼️ 关键图片

📊 实验亮点
MS-HAB基准测试在低级控制方面实现了3倍以上的速度提升,显著降低了GPU内存使用量。通过规则过滤系统,能够高效地从强化学习策略中提取高质量的演示数据,为模仿学习提供了可靠的数据基础。该基准为家庭重排任务的具身智能研究提供了强有力的支持。
🎯 应用场景
该研究成果可应用于家庭服务机器人、智能家居等领域。通过提供高效的仿真环境和高质量的演示数据,可以加速机器人学习在复杂环境中进行物体操作和重排的能力,从而实现更智能、更自主的家庭服务机器人。
📄 摘要(原文)
High-quality benchmarks are the foundation for embodied AI research, enabling significant advancements in long-horizon navigation, manipulation and rearrangement tasks. However, as frontier tasks in robotics get more advanced, they require faster simulation speed, more intricate test environments, and larger demonstration datasets. To this end, we present MS-HAB, a holistic benchmark for low-level manipulation and in-home object rearrangement. First, we provide a GPU-accelerated implementation of the Home Assistant Benchmark (HAB). We support realistic low-level control and achieve over 3x the speed of prior magical grasp implementations at a fraction of the GPU memory usage. Second, we train extensive reinforcement learning (RL) and imitation learning (IL) baselines for future work to compare against. Finally, we develop a rule-based trajectory filtering system to sample specific demonstrations from our RL policies which match predefined criteria for robot behavior and safety. Combining demonstration filtering with our fast environments enables efficient, controlled data generation at scale.