Collision-Inclusive Manipulation Planning for Occluded Object Grasping via Compliant Robot Motions
作者: Kejia Ren, Gaotian Wang, Andrew S. Morgan, Kaiyu Hang
分类: cs.RO
发布日期: 2024-12-09 (更新: 2025-09-12)
备注: This work has been submitted to the IEEE for possible publication
💡 一句话要点
提出碰撞容错操作规划框架,通过柔顺运动实现遮挡物体的抓取
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人操作 碰撞容错 柔顺控制 遮挡抓取 操作规划
📋 核心要点
- 传统机器人操作规划难以处理富接触场景,尤其是在存在遮挡的情况下,难以找到无碰撞的抓取方案。
- 该论文提出一种碰撞容错的操作规划框架,利用柔顺控制吸收碰撞,并策略性地利用环境约束来完成任务。
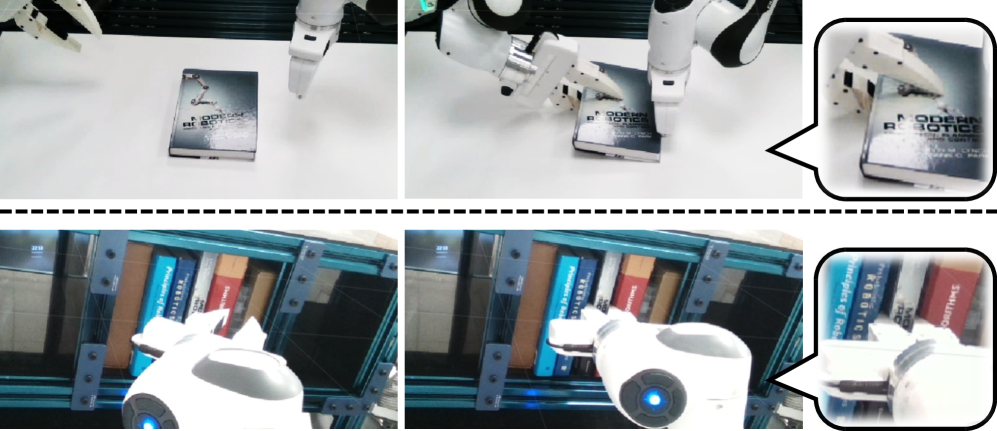
- 通过单臂和双臂机器人的实验验证,该框架能够有效解决现实场景中遮挡物体的抓取问题。
📝 摘要(中文)
本研究针对传统无碰撞解决方案难以处理的富接触操作问题,提出了一种碰撞容错的操作规划框架。该框架允许机器人与环境发生有意的碰撞,并通过笛卡尔阻抗控制吸收这些碰撞,从而过渡到期望的任务配置。通过策略性地利用环境约束,并在任务重复形成的操纵漏斗内进行探索,该框架能够有效降低物理和感知不确定性。在单臂和双臂机器人上的真实世界评估表明,该框架能够有效地解决各种现实的遮挡抓取问题,即使初始状态下不存在可行的抓取。
🔬 方法详解
问题定义:论文旨在解决在存在遮挡的情况下,机器人如何抓取物体的问题。现有方法通常依赖于无碰撞规划,但在遮挡场景下,很难找到完全无碰撞的路径。此外,即使允许碰撞,物理和感知的不确定性也会导致抓取失败。
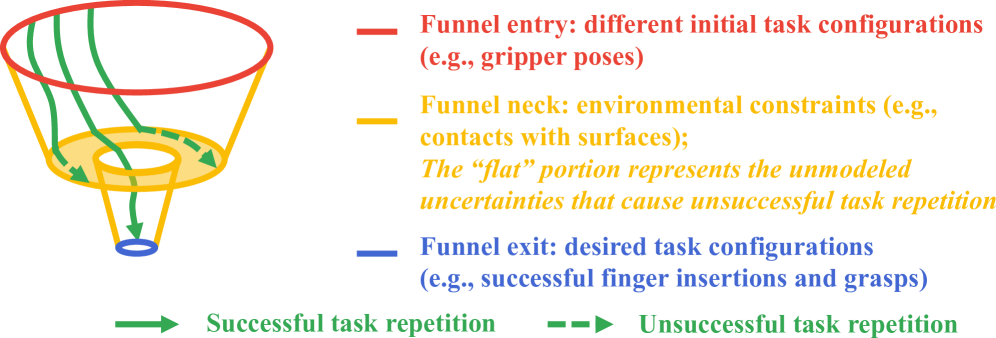
核心思路:核心思路是允许机器人与环境发生可控的碰撞,并利用这些碰撞来辅助抓取。通过柔顺的笛卡尔阻抗控制,机器人可以吸收碰撞带来的冲击,同时利用环境的约束来引导运动。此外,通过重复执行任务,可以形成一个“操纵漏斗”,从而降低不确定性。
技术框架:该框架包含以下几个主要阶段:1) 初始规划:生成一个粗略的运动轨迹,允许与环境发生碰撞。2) 碰撞吸收:利用笛卡尔阻抗控制,使机器人能够柔顺地与环境交互,吸收碰撞带来的冲击。3) 任务重复与优化:通过多次重复执行任务,并根据每次执行的结果进行优化,从而形成一个“操纵漏斗”,降低不确定性。4) 最终抓取:在到达目标区域后,执行最终的抓取动作。
关键创新:最重要的创新点在于将碰撞视为一种资源,而不是需要避免的障碍。通过可控的碰撞和柔顺控制,机器人可以探索更广泛的运动空间,从而找到可行的抓取方案。此外,利用任务重复来降低不确定性也是一个重要的创新。
关键设计:笛卡尔阻抗控制器的参数(刚度、阻尼)需要根据具体的任务和环境进行调整,以保证机器人的柔顺性和稳定性。操纵漏斗的形成依赖于任务的重复执行和结果的反馈,需要设计合适的优化算法来更新运动轨迹。此外,感知系统的精度也会影响抓取的效果,需要采用合适的感知技术来提高物体的定位精度。
🖼️ 关键图片

📊 实验亮点
该论文在真实机器人平台上进行了单臂和双臂的遮挡抓取实验。实验结果表明,该框架能够有效地解决各种现实的遮挡抓取问题,即使初始状态下不存在可行的抓取。通过策略性地利用环境约束和探索操纵漏斗,该框架能够显著降低物理和感知不确定性,提高抓取成功率。
🎯 应用场景
该研究成果可应用于各种需要在复杂环境中进行操作的场景,例如:在拥挤的仓库中抓取货物、在杂乱的工作台上进行装配、在灾难现场进行救援等。通过允许机器人与环境发生可控的碰撞,可以提高机器人的操作能力和适应性,使其能够完成更加复杂的任务。未来,该技术有望应用于智能制造、物流、医疗等领域。
📄 摘要(原文)
Robotic manipulation research has investigated contact-rich problems and strategies that require robots to intentionally collide with their environment, to accomplish tasks that cannot be handled by traditional collision-free solutions. By enabling compliant robot motions, collisions between the robot and its environment become more tolerable and can thus be exploited, but more physical uncertainties are introduced. To address contact-rich problems such as occluded object grasping while handling the involved uncertainties, we propose a collision-inclusive planning framework that can transition the robot to a desired task configuration via roughly modeled collisions absorbed by Cartesian impedance control. By strategically exploiting the environmental constraints and exploring inside a manipulation funnel formed by task repetitions, our framework can effectively reduce physical and perception uncertainties. With real-world evaluations on both single-arm and dual-arm setups, we show that our framework is able to efficiently address various realistic occluded grasping problems where a feasible grasp does not initially exist.