Sparse Identification of Nonlinear Dynamics-based Model Predictive Control for Multirotor Collision Avoidance
作者: Jayden Dongwoo Lee, Youngjae Kim, Yoonseong Kim, Hyochoong Bang
分类: cs.RO, math.OC
发布日期: 2024-12-09
💡 一句话要点
提出基于SINDy的MPC多旋翼避障方法,解决未知模型和不确定性下的轨迹跟踪问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多旋翼飞行器 模型预测控制 稀疏辨识 非线性动力学 数据驱动控制
📋 核心要点
- 传统多旋翼控制方法难以应对有效载荷未知和不确定性带来的模型误差。
- 采用SINDy辨识多旋翼系统的动力学模型,并结合MPC实现轨迹跟踪和避障。
- 仿真结果表明,该方法能够有效辨识系统模型,并实现精确的轨迹跟踪和避障。
📝 摘要(中文)
本文提出了一种数据驱动的模型预测控制(MPC)方法,用于多旋翼飞行器在存在不确定性和未知有效载荷模型下的避障问题。为了解决这一挑战,采用了稀疏非线性动力学辨识(SINDy)来获取多旋翼系统的控制方程。SINDy能够在少量数据下发现目标系统的方程,前提是少数函数具有系统的主导特征。利用模型预测控制(MPC),通过考虑状态和控制输入约束,获得精确的轨迹跟踪性能。为了在操作过程中避免碰撞,使用关于障碍物的不等式约束再次制定MPC优化问题。在仿真中,SINDy能够发现包含质量参数不确定性和空气动力学效应的多旋翼系统控制方程。此外,仿真结果表明,该方法能够准确地避开障碍物并跟踪期望轨迹。
🔬 方法详解
问题定义:多旋翼飞行器在实际应用中,常常面临有效载荷未知、质量参数不确定以及受到复杂空气动力学影响等问题,导致其动力学模型难以精确建立。传统的基于模型的控制方法,如PID控制或线性模型预测控制,难以在这种不确定性下保证控制性能,甚至可能导致系统不稳定。此外,在复杂环境中,多旋翼飞行器还需要具备避障能力,这进一步增加了控制的难度。
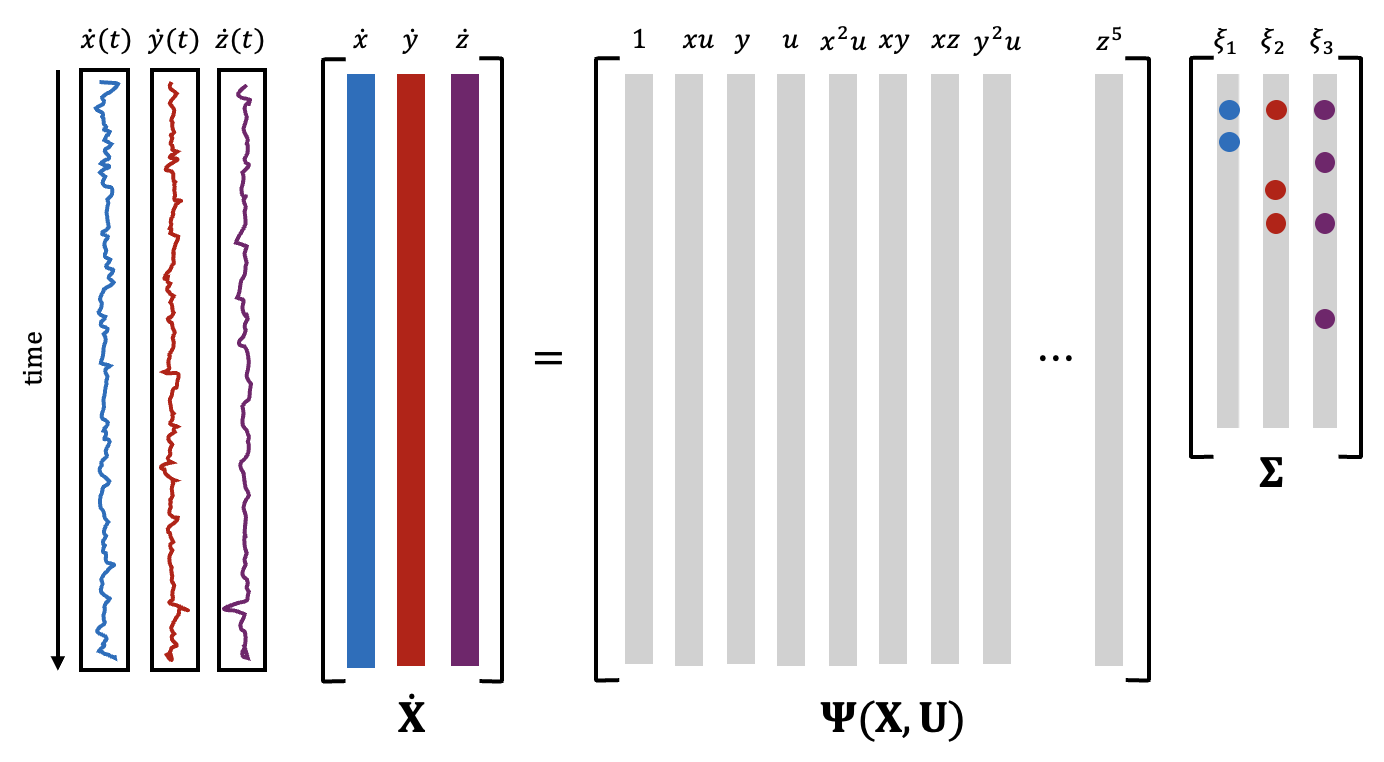
核心思路:本文的核心思路是利用数据驱动的方法,即SINDy,从多旋翼飞行器的运行数据中学习其动力学模型,从而避免了对精确模型的依赖。SINDy假设系统动力学可以用少量关键项的线性组合来表示,通过稀疏回归的方法识别这些关键项。然后,将学习到的动力学模型嵌入到模型预测控制(MPC)框架中,利用MPC的优化能力,实现轨迹跟踪和避障。
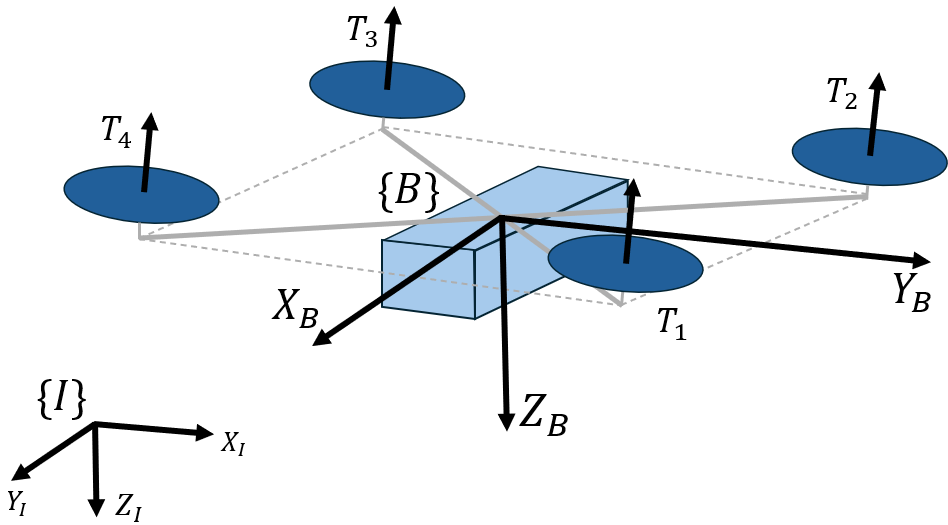
技术框架:该方法主要包含两个阶段:1) 基于SINDy的动力学模型辨识阶段:收集多旋翼飞行器的运行数据,包括状态(位置、速度、姿态等)和控制输入(电机转速等)。利用SINDy算法,从这些数据中学习多旋翼飞行器的动力学模型。2) 基于MPC的轨迹跟踪和避障阶段:将学习到的动力学模型作为MPC的预测模型。在MPC的优化问题中,目标函数通常是最小化跟踪误差和控制输入,约束条件包括状态约束(如位置、速度限制)、控制输入约束(如电机转速限制)以及避障约束(保证多旋翼飞行器与障碍物之间的距离大于安全距离)。
关键创新:该方法最重要的技术创新点在于将SINDy与MPC相结合,实现了一种数据驱动的多旋翼飞行器控制方法。与传统的基于模型的控制方法相比,该方法不需要预先知道多旋翼飞行器的精确模型,而是通过数据学习得到。与传统的基于学习的控制方法相比,该方法利用SINDy学习到的模型具有可解释性,并且需要的训练数据量较少。
关键设计:SINDy算法的关键在于选择合适的候选函数库(例如,多项式函数、三角函数等)以及确定稀疏回归的正则化参数。MPC的关键在于选择合适的预测时域、控制时域以及权重系数。避障约束通常采用不等式约束的形式,例如,保证多旋翼飞行器与障碍物之间的距离大于安全距离。具体参数设置需要根据实际应用场景进行调整。
🖼️ 关键图片

📊 实验亮点
仿真结果表明,该方法能够有效地辨识多旋翼飞行器的动力学模型,即使在存在质量参数不确定性和空气动力学效应的情况下。此外,该方法能够实现精确的轨迹跟踪和避障,跟踪误差较小,并且能够安全地避开障碍物。具体的性能数据(如跟踪误差的具体数值、避障成功率等)在摘要中未给出,属于未知信息。
🎯 应用场景
该研究成果可应用于物流配送、农业植保、灾害救援等领域,尤其是在环境复杂、模型难以精确建立的场景下。通过数据驱动的方式,可以提高多旋翼飞行器的自主性和适应性,降低对先验知识的依赖。未来,该方法可以进一步扩展到多智能体系统,实现多旋翼飞行器的协同控制和避障。
📄 摘要(原文)
This paper proposes a data-driven model predictive control for multirotor collision avoidance considering uncertainty and an unknown model from a payload. To address this challenge, sparse identification of nonlinear dynamics (SINDy) is used to obtain the governing equation of the multirotor system. The SINDy can discover the equations of target systems with low data, assuming that few functions have the dominant characteristic of the system. Model predictive control (MPC) is utilized to obtain accurate trajectory tracking performance by considering state and control input constraints. To avoid a collision during operation, MPC optimization problem is again formulated using inequality constraints about an obstacle. In simulation, SINDy can discover a governing equation of multirotor system including mass parameter uncertainty and aerodynamic effects. In addition, the simulation results show that the proposed method has the capability to avoid an obstacle and track the desired trajectory accurately.