Flagellar Swimming at Low Reynolds Numbers: Zoospore-Inspired Robotic Swimmers with Dual Flagella for High-Speed Locomotion
作者: Nnamdi C. Chikere, Sofia Lozano Voticky, Quang D. Tran, Yasemin Ozkan-Aydin
分类: cs.RO
发布日期: 2024-12-07
💡 一句话要点
提出一种受游动孢子启发的双鞭毛微型机器人,用于低雷诺数下的高速运动。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 微型机器人 低雷诺数 双鞭毛 游动孢子 生物启发 运动控制 流体动力学
📋 核心要点
- 低雷诺数环境下的传统运动方式效率低下,需要新的推进机制。
- 设计了一种双鞭毛微型机器人,模仿游动孢子的运动方式,实现高效推进。
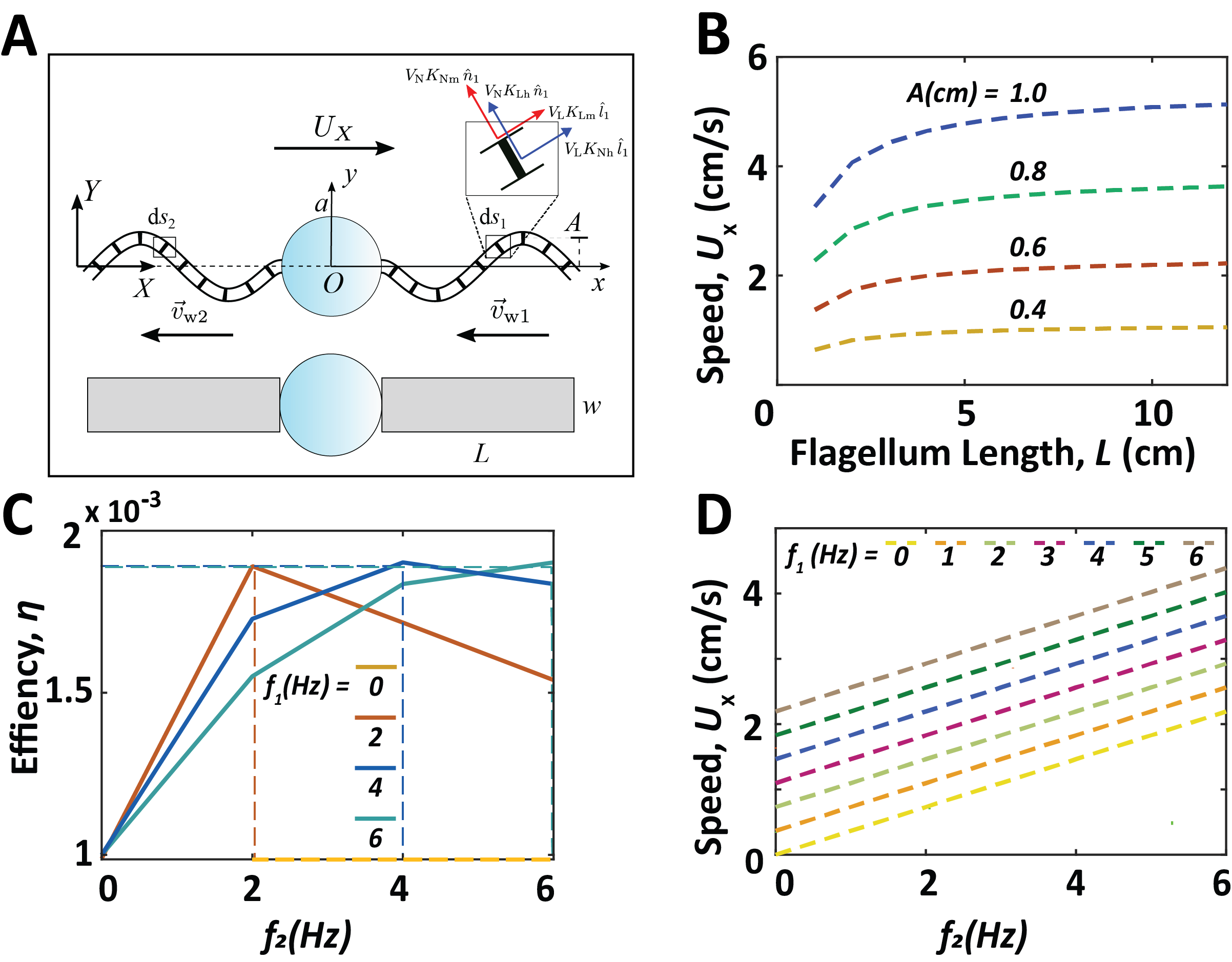
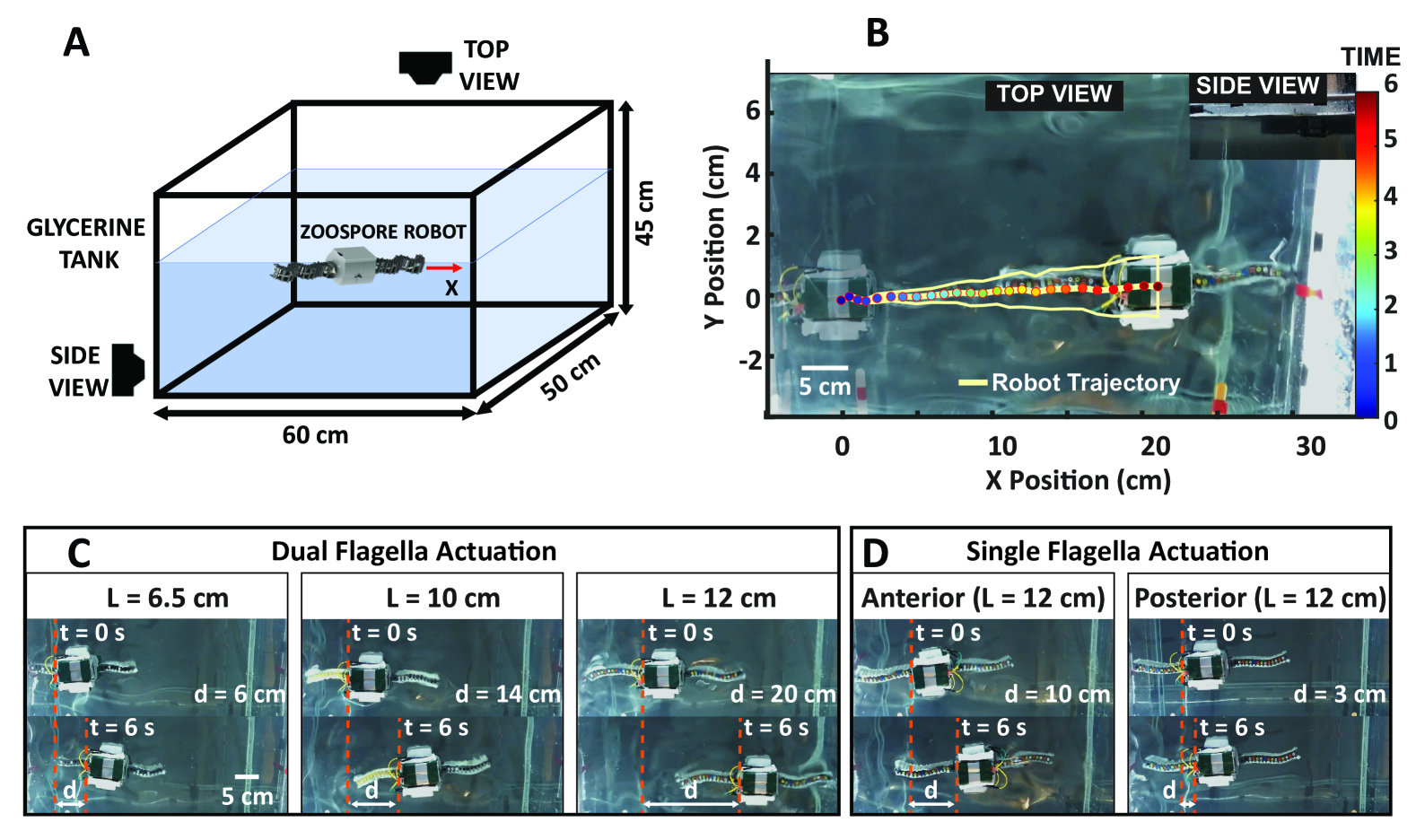
- 实验表明,鞭毛长度和振荡频率对推进速度有显著影响,前鞭毛作用更关键。
📝 摘要(中文)
在低雷诺数环境下,传统运动策略失效。本研究设计、制造并测试了一种受游动孢子启发的机器人,该机器人利用双柔性鞭毛和振荡推进机制来模拟游动孢子的自然游泳行为。实验和理论模型表明,鞭毛长度和振荡频率都强烈影响机器人的推进速度,更长的鞭毛和更高的频率产生更好的性能。此外,与后鞭毛的推力相比,产生拉力的前鞭毛在提高推进效率方面起主导作用。这是一项重要的实验发现,因为在生物游动孢子中很难直接观察到,生物游动孢子会在前鞭毛脱落时自发释放后鞭毛。这项工作有助于开发先进的微型机器人系统,在医疗、环境和工业领域具有潜在应用。它还为研究生物游动孢子及其独特的运动策略提供了一个有价值的平台。
🔬 方法详解
问题定义:论文旨在解决低雷诺数环境下微型机器人的高效推进问题。现有方法在粘性力占主导的环境中效率低下,难以实现快速和精确的运动。生物游动孢子在低雷诺数下表现出优异的运动能力,但对其运动机制的深入研究和工程应用仍然面临挑战。
核心思路:论文的核心思路是模仿游动孢子的双鞭毛推进机制,设计一种微型机器人,通过控制双鞭毛的振荡来实现高效运动。这种设计借鉴了生物系统的优势,旨在克服传统推进方法在低雷诺数环境下的局限性。
技术框架:该研究的技术框架包括以下几个主要阶段:1) 机器人设计:基于游动孢子的生物学特征,设计具有双柔性鞭毛的微型机器人。2) 机器人制造:采用合适的材料和工艺,制造出具有所需尺寸和性能的微型机器人。3) 实验测试:在受控环境下进行实验,测量机器人的推进速度和效率,并分析鞭毛运动参数的影响。4) 理论建模:建立数学模型,描述鞭毛运动与机器人推进之间的关系,为优化设计提供理论指导。
关键创新:该研究的关键创新在于:1) 提出了一种受游动孢子启发的双鞭毛微型机器人设计,能够有效适应低雷诺数环境。2) 实验证明了前鞭毛在提高推进效率方面的主导作用,这在生物学研究中难以直接观察。3) 通过实验和理论建模相结合的方法,深入研究了鞭毛运动参数对机器人推进性能的影响。
关键设计:关键设计包括:1) 鞭毛的长度和柔性:选择合适的鞭毛长度和材料,以实现最佳的推进效果。2) 鞭毛的振荡频率和幅度:控制鞭毛的振荡频率和幅度,以调节机器人的运动速度和方向。3) 机器人的整体尺寸和形状:优化机器人的整体尺寸和形状,以减少阻力并提高推进效率。
🖼️ 关键图片

📊 实验亮点
实验结果表明,鞭毛长度和振荡频率对机器人的推进速度有显著影响,更长的鞭毛和更高的频率能够提高推进速度。此外,实验还发现前鞭毛在提高推进效率方面起主导作用,这为优化微型机器人设计提供了重要依据。该研究为生物游动孢子的运动机制研究提供了新的视角和工具。
🎯 应用场景
该研究成果可应用于医疗、环境和工业等领域。在医疗领域,微型机器人可用于靶向药物递送、微创手术和体内诊断。在环境领域,可用于水质监测、污染物清除和微观生物研究。在工业领域,可用于微型器件组装、精密制造和管道检测。该研究为开发更高效、更智能的微型机器人系统奠定了基础,具有广阔的应用前景。
📄 摘要(原文)
Traditional locomotion strategies become ineffective at low Reynolds numbers, where viscous forces predominate over inertial forces. To adapt, microorganisms have evolved specialized structures like cilia and flagella for efficient maneuvering in viscous environments. Among these organisms, Phytophthora zoospores demonstrate unique locomotion mechanisms that allow them to rapidly spread and attack new hosts while expending minimal energy. In this study, we present the design, fabrication, and testing of a zoospore-inspired robot, which leverages dual flexible flagella and oscillatory propulsion mechanisms to emulate the natural swimming behavior of zoospores. Our experiments and theoretical model reveal that both flagellar length and oscillation frequency strongly influence the robot's propulsion speed, with longer flagella and higher frequencies yielding enhanced performance. Additionally, the anterior flagellum, which generates a pulling force on the body, plays a dominant role in enhancing propulsion efficiency compared to the posterior flagellum's pushing force. This is a significant experimental finding, as it would be challenging to observe directly in biological zoospores, which spontaneously release the posterior flagellum when the anterior flagellum detaches. This work contributes to the development of advanced microscale robotic systems with potential applications in medical, environmental, and industrial fields. It also provides a valuable platform for studying biological zoospores and their unique locomotion strategies.