Can Large Language Models Help Developers with Robotic Finite State Machine Modification?
作者: Xiangyu Robin Gan, Yuxin Ray Song, Nick Walker, Maya Cakmak
分类: cs.RO
发布日期: 2024-12-07
💡 一句话要点
利用大型语言模型辅助开发者修改机器人有限状态机
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 有限状态机 机器人 代码生成 自然语言处理
📋 核心要点
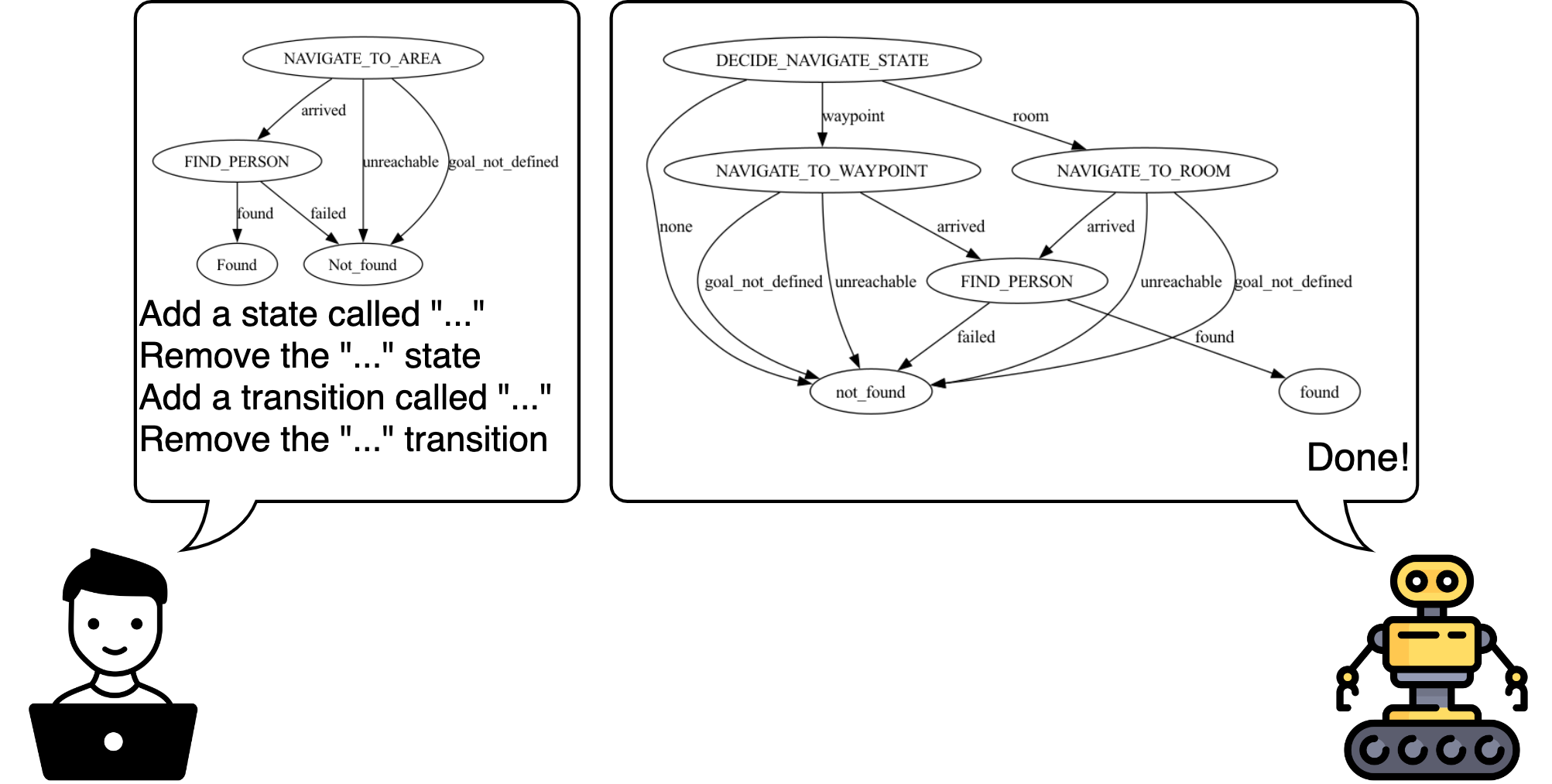
- 传统机器人有限状态机(FSM)的修改过程耗时且易错,难以适应复杂控制逻辑的快速迭代。
- 利用大型语言模型(LLM)理解自然语言指令,并将其转化为对FSM代码的修改,提高开发效率。
- 在真实机器人数据集上验证了该方法,证明了其在实际场景中修改FSM代码的有效性。
📝 摘要(中文)
有限状态机(FSM)广泛用于管理机器人行为逻辑,尤其是在需要高可靠性和结构化的实际应用中。然而,传统的手动FSM设计和修改过程耗时且容易出错。我们提出,大型语言模型(LLM)可以帮助开发者编辑用于真实机器人用例的FSM代码。LLM凭借其利用上下文和处理自然语言的能力,为FSM修改提供了一个高正确率的解决方案,允许开发者通过自然语言指令更新复杂的控制逻辑。我们的方法利用少量样本提示和语言引导的代码生成来减少编辑FSM所需的时间。为了验证这种方法,我们在一个真实的机器人数据集上对其进行评估,证明了其在实际场景中的有效性。
🔬 方法详解
问题定义:论文旨在解决机器人领域中,开发者手动修改有限状态机(FSM)代码时面临的效率低下和容易出错的问题。现有的手动修改方式难以应对复杂机器人行为逻辑的快速迭代和调整,需要一种更高效、更可靠的FSM修改方法。
核心思路:论文的核心思路是利用大型语言模型(LLM)的自然语言理解和代码生成能力,将开发者输入的自然语言指令转化为对FSM代码的修改。通过LLM理解开发者的意图,并自动生成相应的代码,从而减少手动修改的工作量和出错概率。
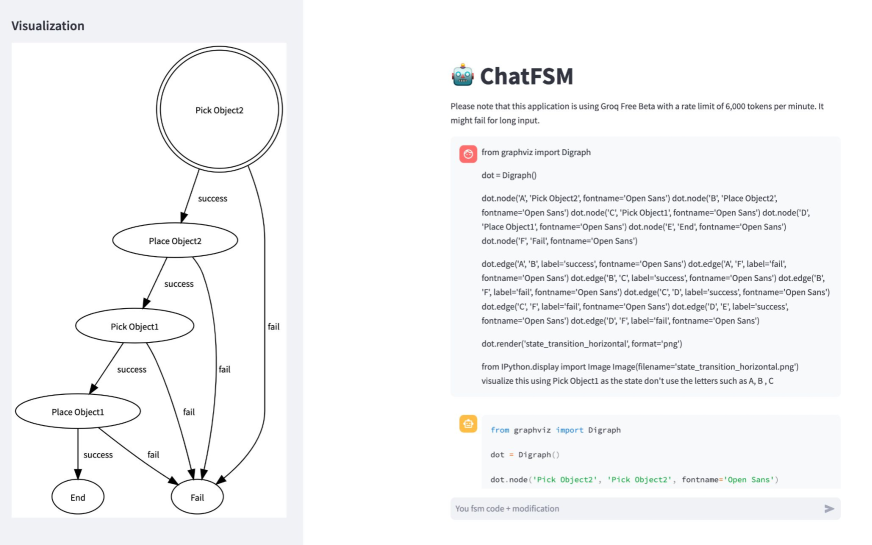
技术框架:该方法主要包含两个阶段:少量样本提示(Few-shot Prompting)和语言引导的代码生成(Language-guided Code Generation)。首先,通过少量示例向LLM展示如何将自然语言指令映射到FSM代码修改。然后,利用LLM根据输入的自然语言指令生成相应的FSM代码修改方案。整个过程无需对LLM进行微调,而是利用其上下文学习能力。
关键创新:该方法最重要的创新点在于将大型语言模型应用于机器人FSM代码的修改,实现了自然语言到代码的转换。与传统的代码生成方法相比,该方法不需要大量的训练数据,而是通过少量样本提示即可实现较好的效果。此外,该方法能够理解复杂的自然语言指令,并生成相应的代码,从而提高了FSM修改的灵活性和效率。
关键设计:在少量样本提示阶段,需要精心设计示例,以帮助LLM理解自然语言指令和FSM代码之间的映射关系。示例应包含不同的指令类型和对应的代码修改方案。在语言引导的代码生成阶段,需要对LLM的输出进行约束,以确保生成的代码符合FSM的语法和语义规则。具体的参数设置和网络结构未知,因为论文侧重于方法验证而非模型优化。
🖼️ 关键图片

📊 实验亮点
论文通过在真实机器人数据集上的实验验证了该方法的有效性。实验结果表明,该方法能够显著减少FSM代码修改所需的时间,并提高修改的正确率。具体的性能数据和对比基线未知,但摘要强调了其在实际场景中的有效性。
🎯 应用场景
该研究成果可应用于各种机器人应用场景,例如服务机器人、工业机器人和自动驾驶汽车等。通过自然语言指令修改机器人行为逻辑,可以大大降低开发和维护成本,提高机器人的适应性和智能化水平。未来,该技术有望实现机器人行为的快速定制和部署,加速机器人技术的普及。
📄 摘要(原文)
Finite state machines (FSMs) are widely used to manage robot behavior logic, particularly in real-world applications that require a high degree of reliability and structure. However, traditional manual FSM design and modification processes can be time-consuming and error-prone. We propose that large language models (LLMs) can assist developers in editing FSM code for real-world robotic use cases. LLMs, with their ability to use context and process natural language, offer a solution for FSM modification with high correctness, allowing developers to update complex control logic through natural language instructions. Our approach leverages few-shot prompting and language-guided code generation to reduce the amount of time it takes to edit an FSM. To validate this approach, we evaluate it on a real-world robotics dataset, demonstrating its effectiveness in practical scenarios.