Using Fitts' Law to Benchmark Assisted Human-Robot Performance
作者: Jiahe Pan, Jonathan Eden, Denny Oetomo, Wafa Johal
分类: cs.RO
发布日期: 2024-12-06
备注: 9 pages, 5 figures. arXiv admin note: text overlap with arXiv:2402.02758
💡 一句话要点
提出基于Fitts定律的共享控制系统基准测试方法,量化评估人机协作性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机协作 共享控制 Fitts定律 基准测试 认知负荷
📋 核心要点
- 共享控制系统性能优化面临挑战,需要根据任务难度动态调整机器人辅助水平,以平衡操作员认知负荷。
- 论文提出基于Fitts定律的基准测试方法,通过参数化任务难度,量化分析任务难度和机器人自主性对性能的影响。
- 实验结果表明,任务难度和机器人自主性显著影响任务性能、认知负荷和信任度,并可使用Fitts模型进行建模。
📝 摘要(中文)
共享控制系统旨在结合人类和机器人的能力来提高任务性能。然而,实现最佳性能需要机器人辅助水平根据任务难度调整操作员的认知负荷。理解并动态调整这种平衡对于最大化效率和用户满意度至关重要。本文提出了一种基于Fitts定律的共享控制系统基准测试新方法,以正式参数化目标到达任务的难度级别。通过这种方法,我们系统地量化和建模了任务难度(即目标的大小和距离)和机器人自主性对任务性能和操作员认知负荷及信任水平的影响。我们的实证结果(N=24)不仅表明任务难度和机器人自主性都会影响任务性能,而且性能可以使用这些参数进行建模,这可能允许将这种关系推广到更多样化的设置中。我们还发现,用户的感知认知负荷和信任受到这些因素的影响。鉴于实时直接测量认知负荷的挑战,我们改进的Fitts模型提出了一种潜在的替代方法,通过确定任务的难度级别来估计认知负荷,假设更大的任务难度会导致更高的认知负荷水平。我们希望这些见解和我们提出的框架能够激发未来的工作,进一步研究该方法的通用性,最终实现共享控制质量和用户影响的基准测试和系统评估,这将有助于开发更有效和适应性更强的系统。
🔬 方法详解
问题定义:论文旨在解决共享控制系统中,如何系统性地评估人机协作性能,并量化任务难度、机器人自主性对操作员认知负荷和信任度的影响。现有方法难以有效参数化任务难度,无法建立任务难度与性能之间的明确关系。
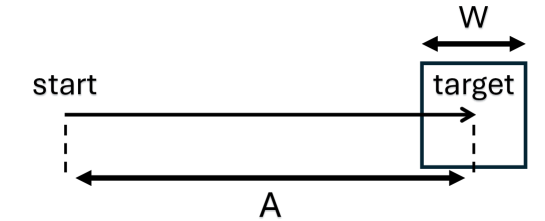
核心思路:论文的核心思路是将Fitts定律应用于共享控制系统的基准测试。Fitts定律描述了目标到达任务的难度与完成时间之间的关系。通过将任务难度参数化(目标大小和距离),可以系统地研究任务难度和机器人自主性对任务性能的影响。
技术框架:该方法主要包含以下几个阶段:1) 设计基于Fitts定律的目标到达任务;2) 控制任务难度(目标大小和距离)和机器人自主性水平;3) 收集任务完成时间、操作员认知负荷(主观评估)和信任度数据;4) 使用Fitts模型对任务性能进行建模,分析任务难度和机器人自主性对性能的影响。
关键创新:该方法的关键创新在于将经典的Fitts定律应用于人机协作的共享控制系统,并将其作为一种基准测试工具。通过这种方式,可以量化任务难度,并建立任务难度、机器人自主性与任务性能、认知负荷和信任度之间的关系。这为共享控制系统的设计和优化提供了新的思路。
关键设计:实验中,目标大小和距离作为任务难度的参数,机器人自主性水平通过调整机器人对操作员指令的响应程度来控制。认知负荷通过NASA-TLX量表进行主观评估。Fitts模型用于拟合任务完成时间与任务难度之间的关系,模型参数用于量化任务难度和机器人自主性的影响。
🖼️ 关键图片


📊 实验亮点
实验结果表明,任务难度和机器人自主性均显著影响任务性能。研究者使用Fitts模型成功建模了任务难度和机器人自主性与任务完成时间之间的关系。此外,实验还发现任务难度和机器人自主性对操作员的认知负荷和信任度有显著影响。该研究为共享控制系统的设计和评估提供了一种新的、量化的方法。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如辅助驾驶、远程手术、工业机器人等。通过该方法,可以系统地评估和优化共享控制系统的性能,提高人机协作效率和用户满意度。此外,该方法还可以用于评估不同机器人自主性水平对操作员认知负荷的影响,从而设计更安全、更舒适的人机交互界面。
📄 摘要(原文)
Shared control systems aim to combine human and robot abilities to improve task performance. However, achieving optimal performance requires that the robot's level of assistance adjusts the operator's cognitive workload in response to the task difficulty. Understanding and dynamically adjusting this balance is crucial to maximizing efficiency and user satisfaction. In this paper, we propose a novel benchmarking method for shared control systems based on Fitts' Law to formally parameterize the difficulty level of a target-reaching task. With this we systematically quantify and model the effect of task difficulty (i.e. size and distance of target) and robot autonomy on task performance and operators' cognitive load and trust levels. Our empirical results (N=24) not only show that both task difficulty and robot autonomy influence task performance, but also that the performance can be modelled using these parameters, which may allow for the generalization of this relationship across more diverse setups. We also found that the users' perceived cognitive load and trust were influenced by these factors. Given the challenges in directly measuring cognitive load in real-time, our adapted Fitts' model presents a potential alternative approach to estimate cognitive load through determining the difficulty level of the task, with the assumption that greater task difficulty results in higher cognitive load levels. We hope that these insights and our proposed framework inspire future works to further investigate the generalizability of the method, ultimately enabling the benchmarking and systematic assessment of shared control quality and user impact, which will aid in the development of more effective and adaptable systems.