Learning Based MPC for Autonomous Driving Using a Low Dimensional Residual Model
作者: Yaoyu Li, Chaosheng Huang, Dongsheng Yang, Wenbo Liu, Jun Li
分类: cs.RO, eess.SY
发布日期: 2024-12-05
备注: 7 pages, 11 figures, 4 tables. Submitted to IEEE ICRA 2025
💡 一句话要点
提出基于低维残差模型的学习型MPC,提升自动驾驶车辆控制精度
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自动驾驶 模型预测控制 残差学习 车辆动力学 低维建模
📋 核心要点
- 车辆动力学复杂性导致难以建立精确的车辆模型,进而影响MPC控制器的性能。
- 将车辆模型分解为不变和可变部分,利用低维残差模型学习可变部分的偏差,提高模型精度。
- 通过仿真和实车实验验证,表明该方法能有效提高模型精度和控制器性能。
📝 摘要(中文)
本文提出了一种基于学习的、使用低维残差模型的模型预测控制(MPC)方法,用于自动驾驶。自动驾驶的关键挑战之一是车辆动力学的复杂性,这阻碍了精确车辆模型的构建。不准确的车辆模型会显著影响MPC控制器的性能。为了解决这个问题,本文将标称车辆模型分解为不变和可变元素。不变分量的准确性通过校准来保证,而可变元素的偏差则通过低维残差模型来学习。残差模型的特征被选择为与标称模型误差最相关的物理变量。这些特征之间的物理约束被公式化,以明确定义特征空间内的有效区域。所构建的模型和约束被纳入MPC框架中,并通过仿真和真实车辆实验进行了验证。结果表明,该方法显著提高了模型精度和控制器性能。
🔬 方法详解
问题定义:自动驾驶中,精确的车辆动力学模型对于MPC控制至关重要。然而,车辆动力学的复杂性使得建立精确模型非常困难。现有的MPC方法依赖于标称模型,但标称模型与真实车辆动力学之间存在偏差,导致控制性能下降。
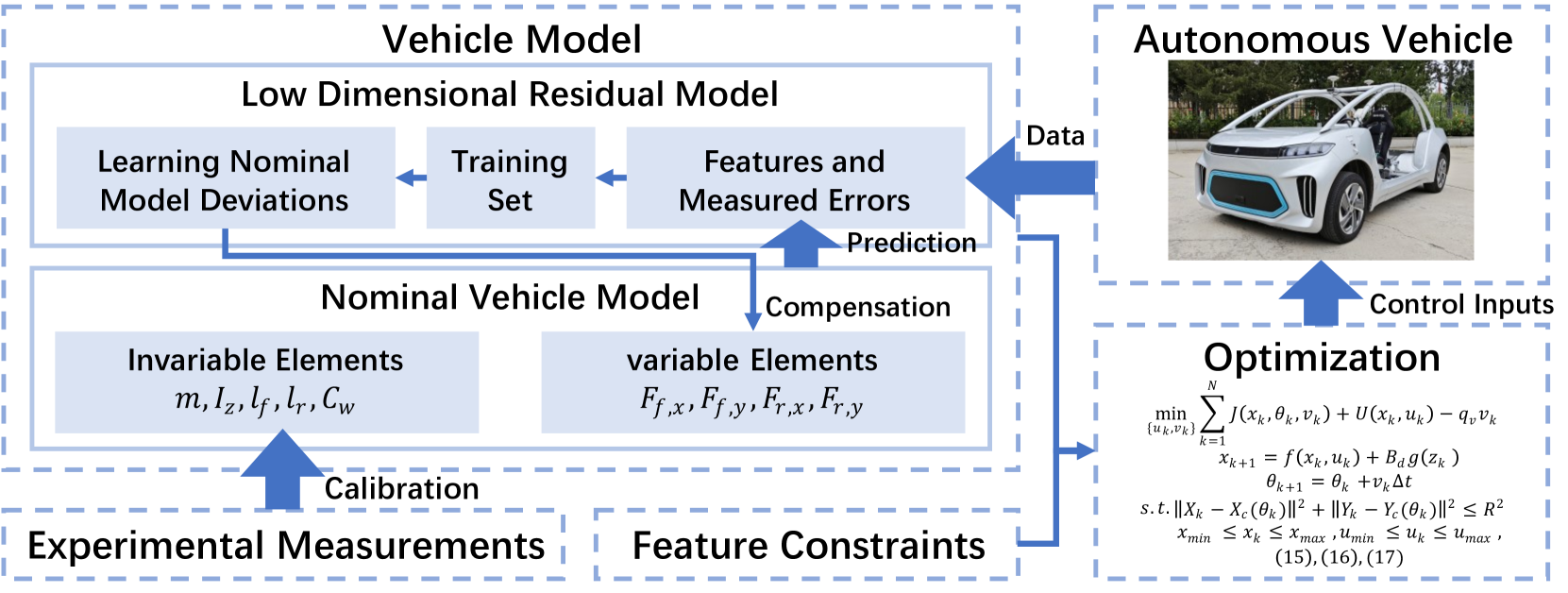
核心思路:本文的核心思路是将车辆模型分解为不变部分和可变部分。不变部分可以通过标定精确获得,而可变部分的偏差则通过学习得到。通过学习低维残差模型来补偿标称模型的误差,从而提高整体模型的精度。这种方法降低了学习的复杂性,并提高了模型的泛化能力。
技术框架:该方法首先对车辆进行标定,确定不变的车辆参数。然后,建立标称车辆模型。接下来,设计一个低维残差模型,该模型以与标称模型误差最相关的物理变量作为输入特征。这些特征之间的物理约束被显式地建模,以确保残差模型在有效区域内运行。最后,将标称模型和残差模型结合起来,构建一个更精确的车辆模型,并将其应用于MPC控制器中。
关键创新:该方法最重要的创新点在于使用低维残差模型来学习车辆动力学的偏差。与直接学习整个车辆模型相比,学习残差模型可以显著降低学习的复杂性,并提高模型的鲁棒性。此外,显式地建模特征之间的物理约束,可以进一步提高模型的可靠性。
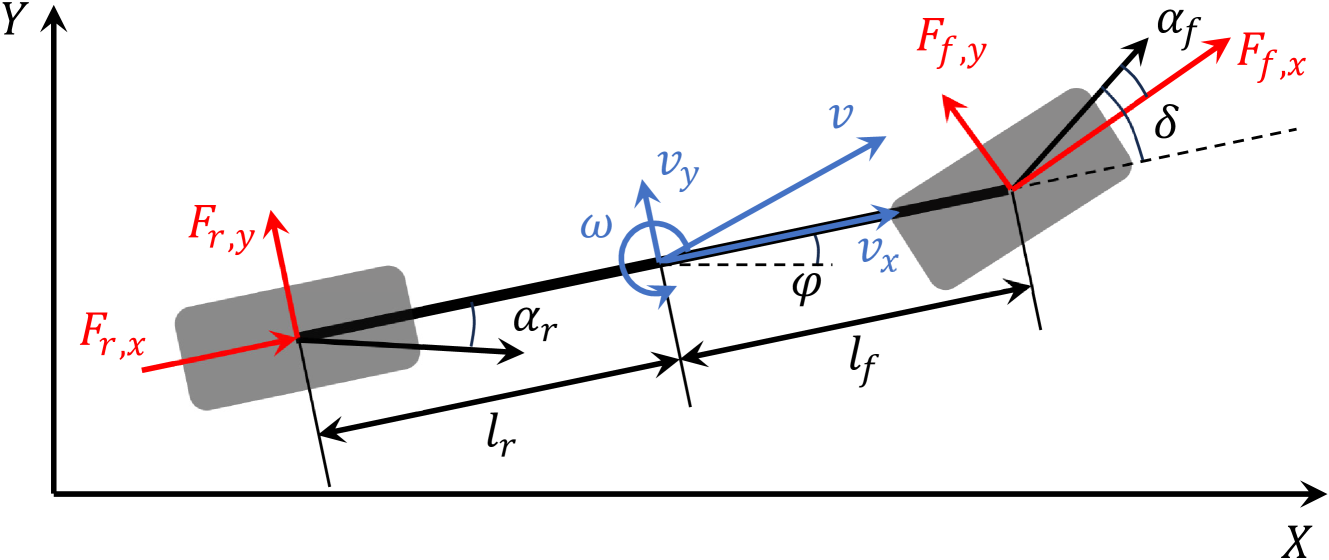
关键设计:残差模型的输入特征选择是关键。论文选择与标称模型误差最相关的物理变量作为特征,例如车辆速度、加速度、转向角等。残差模型的网络结构可以根据具体情况选择,例如线性模型、神经网络等。损失函数的设计需要考虑模型的精度和鲁棒性。MPC控制器的参数,如预测时域、控制时域、权重系数等,需要根据具体应用进行调整。
🖼️ 关键图片
📊 实验亮点
该论文通过仿真和实车实验验证了所提出方法的有效性。实验结果表明,与传统的MPC方法相比,该方法可以显著提高车辆模型的精度和控制性能。具体的性能提升数据在论文中给出,证明了低维残差模型在补偿车辆动力学偏差方面的有效性。
🎯 应用场景
该研究成果可应用于各种自动驾驶场景,例如高速公路自动驾驶、城市道路自动驾驶、自动泊车等。通过提高车辆模型的精度,可以提高自动驾驶系统的安全性、舒适性和效率。此外,该方法还可以应用于其他需要精确模型预测控制的领域,例如机器人控制、过程控制等。
📄 摘要(原文)
In this paper, a learning based Model Predictive Control (MPC) using a low dimensional residual model is proposed for autonomous driving. One of the critical challenge in autonomous driving is the complexity of vehicle dynamics, which impedes the formulation of accurate vehicle model. Inaccurate vehicle model can significantly impact the performance of MPC controller. To address this issue, this paper decomposes the nominal vehicle model into invariable and variable elements. The accuracy of invariable component is ensured by calibration, while the deviations in the variable elements are learned by a low-dimensional residual model. The features of residual model are selected as the physical variables most correlated with nominal model errors. Physical constraints among these features are formulated to explicitly define the valid region within the feature space. The formulated model and constraints are incorporated into the MPC framework and validated through both simulation and real vehicle experiments. The results indicate that the proposed method significantly enhances the model accuracy and controller performance.