Safe Adaptive Cruise Control Under Perception Uncertainty: A Deep Ensemble and Conformal Tube Model Predictive Control Approach
作者: Xiao Li, Anouck Girard, Ilya Kolmanovsky
分类: cs.RO, cs.AI, eess.SY
发布日期: 2024-12-05
💡 一句话要点
提出基于深度集成和一致性Tube MPC的感知不确定性下的安全自适应巡航控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自适应巡航控制 深度集成 一致性预测 模型预测控制 感知不确定性 自动驾驶安全 Tube MPC
📋 核心要点
- 自动驾驶依赖感知系统,但现有方法在不确定性量化方面存在不足,影响安全性。
- 论文提出深度集成和一致性预测相结合的方法,量化感知不确定性,并用于下游控制器设计。
- 实验表明,该方法在速度跟踪和安全距离保持方面有效,尤其是在分布外场景下。
📝 摘要(中文)
本文针对自动驾驶中感知系统对环境理解的依赖性,提出了一种深度神经网络回归器集成与一致性预测相结合的方法,用于预测和量化不确定性,以增强安全关键应用的鲁棒性。在自适应巡航控制(ACC)场景中,该方法从RGB图像中执行状态和不确定性估计,并将DNN感知不确定性告知下游控制器。设计了一种使用一致性Tube模型预测控制的自适应巡航控制器,以确保概率安全性。在高保真模拟器上的评估表明,该算法在速度跟踪和安全距离保持方面的有效性,包括在分布外(Out-Of-Distribution)场景中。
🔬 方法详解
问题定义:论文旨在解决自动驾驶中,由于感知系统(特别是基于深度神经网络的感知系统)存在不确定性,导致自适应巡航控制(ACC)系统可能出现安全风险的问题。现有方法通常忽略或简化了感知不确定性的建模,无法保证在各种场景下的安全性和可靠性。尤其是在分布外(OOD)场景下,感知系统的性能会显著下降,导致安全问题。
核心思路:论文的核心思路是利用深度集成(Deep Ensemble)来估计感知不确定性,并结合一致性预测(Conformal Prediction)来提供具有概率保证的不确定性量化。然后,将这些不确定性信息融入到Tube模型预测控制(Tube MPC)框架中,设计一个鲁棒的自适应巡航控制器,以确保在存在感知不确定性的情况下,车辆能够安全地跟踪目标速度并保持安全距离。
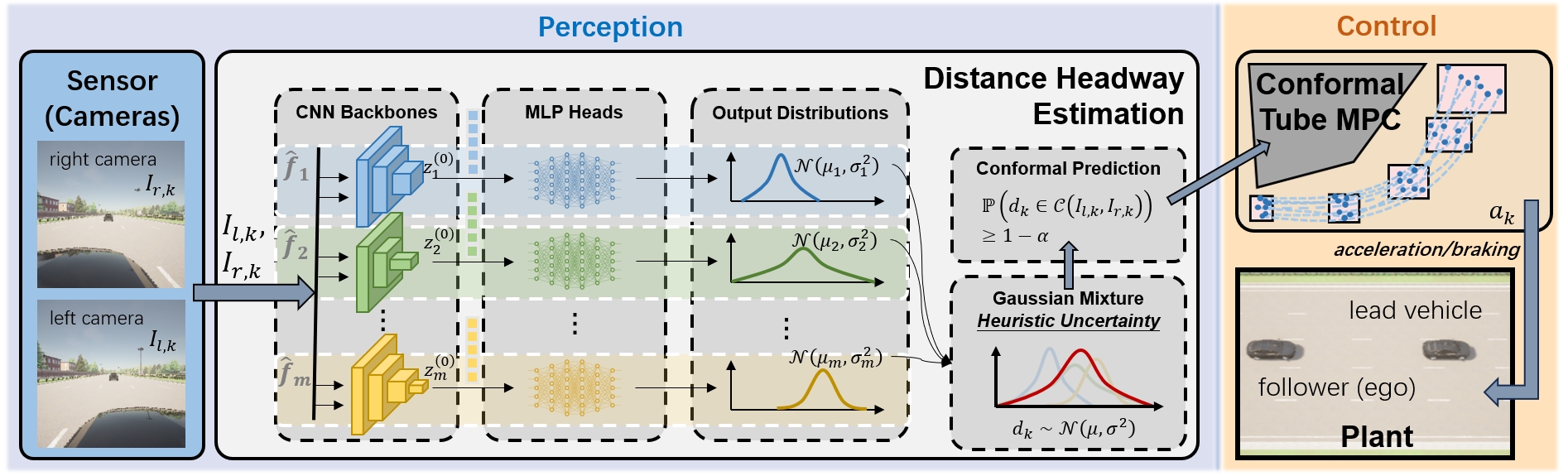
技术框架:整体框架包括三个主要模块:1) 基于深度集成的感知模块,用于从RGB图像中估计车辆状态(如距离、速度)和不确定性;2) 一致性预测模块,用于将深度集成的输出转化为具有概率保证的置信区间;3) 基于Conformal Tube MPC的控制器,利用感知模块提供的状态估计和不确定性信息,生成控制指令,确保车辆的安全性和性能。
关键创新:论文的关键创新在于将深度集成、一致性预测和Tube MPC相结合,形成一个完整的、具有概率安全保证的自适应巡航控制系统。深度集成提供了一种有效的估计感知不确定性的方法,一致性预测则提供了严格的概率保证,而Tube MPC则能够利用这些不确定性信息设计鲁棒的控制器。与传统的基于确定性感知的ACC系统相比,该方法能够更好地应对感知不确定性,提高系统的安全性和可靠性。
关键设计:深度集成由多个具有相同结构的深度神经网络组成,每个网络使用不同的初始化和训练数据。一致性预测使用校准数据集来确定置信区间的大小,以保证覆盖率。Tube MPC使用一个标称轨迹和一个Tube来约束实际轨迹,Tube的大小取决于感知不确定性的范围。损失函数包括跟踪误差、控制输入和安全约束等项。
🖼️ 关键图片


📊 实验亮点
在高保真模拟器上的实验结果表明,该方法在速度跟踪和安全距离保持方面表现出色,即使在分布外(OOD)场景下也能保持较高的安全性。与传统的ACC系统相比,该方法能够更好地应对感知不确定性,显著降低碰撞风险。具体性能数据(如跟踪误差、安全距离违规次数等)未在摘要中明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于各种自动驾驶场景,特别是需要高安全性的应用,如高速公路巡航、城市道路自动驾驶等。通过量化和利用感知不确定性,可以提高自动驾驶系统的鲁棒性和可靠性,降低事故风险。此外,该方法还可以推广到其他需要感知信息的控制系统,如机器人导航、无人机控制等。
📄 摘要(原文)
Autonomous driving heavily relies on perception systems to interpret the environment for decision-making. To enhance robustness in these safety critical applications, this paper considers a Deep Ensemble of Deep Neural Network regressors integrated with Conformal Prediction to predict and quantify uncertainties. In the Adaptive Cruise Control setting, the proposed method performs state and uncertainty estimation from RGB images, informing the downstream controller of the DNN perception uncertainties. An adaptive cruise controller using Conformal Tube Model Predictive Control is designed to ensure probabilistic safety. Evaluations with a high-fidelity simulator demonstrate the algorithm's effectiveness in speed tracking and safe distance maintaining, including in Out-Of-Distribution scenarios.