Soft Adaptive Feet for Legged Robots: An Open-Source Model for Locomotion Simulation
作者: Matteo Crotti, Luca Rossini, Balint K. Hodossy, Anna Pace, Giorgio Grioli, Antonio Bicchi, Manuel G. Catalano
分类: cs.RO, eess.SY
发布日期: 2024-12-04 (更新: 2025-01-07)
DOI: 10.1109/ACCESS.2025.3608584
💡 一句话要点
提出一种基于MuJoCo的软体自适应足模型,提升腿式机器人在复杂地形的运动能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 腿式机器人 自适应足 MuJoCo 运动仿真
📋 核心要点
- 现有腿式机器人在复杂地形的移动性受限,刚性足部难以适应不规则表面。
- 论文提出一种基于软体机器人和欠驱动原理的自适应软足,并构建了MuJoCo数字孪生模型。
- 实验表明,集成该软足的COMAN+机器人在不改变控制策略的情况下,越障能力得到提升。
📝 摘要(中文)
本文提出了一种基于软体机器人和欠驱动原理的人工足,旨在提高腿式机器人在复杂地形上的移动能力。该研究利用MuJoCo物理引擎,构建了自适应软足的数字孪生模型,并将其开源,以供用户和研究人员探索新的运动方法。文中详细介绍了系统建模技术以及相关的运动学和动力学属性。通过与物理原型进行的基准测试进行严格的验证,并在仿真中复现这些实验。结果基于足底变形和足-障碍物交互过程中的接触力进行评估。该足部模型随后被集成到人形机器人COMAN+的仿真中,替换了其原有的扁平足。结果表明,在不改变其控制策略的情况下,机器人越过小型障碍物的能力得到了提高。最终,这项研究提供了一种全面的自适应软足建模方法,并通过对双足机器人与最先进的机器人足的运动进行定性比较来支持。
🔬 方法详解
问题定义:现有腿式机器人通常采用刚性足部,在复杂地形上运动时,难以适应不规则表面,导致稳定性下降和能量效率降低。因此,需要一种能够适应地形变化的自适应足部设计,以提高机器人的运动性能。
核心思路:论文的核心思路是利用软体机器人和欠驱动原理设计一种自适应软足,使其能够被动地适应地形变化,从而提高机器人的稳定性和运动能力。通过在MuJoCo物理引擎中构建该软足的数字孪生模型,可以方便地进行仿真和优化。
技术框架:该研究的技术框架主要包括以下几个部分:1) 软足的物理设计和建模;2) 在MuJoCo中构建软足的数字孪生模型,包括几何建模、材料属性设置和接触模型配置;3) 通过与物理原型进行基准测试来验证模型的准确性;4) 将软足模型集成到COMAN+人形机器人仿真中,并评估其在越障等任务中的性能。
关键创新:该论文的关键创新在于提出了一种基于软体机器人和欠驱动原理的自适应软足设计,并成功地将其集成到人形机器人仿真中。与传统的刚性足部相比,该软足能够更好地适应地形变化,从而提高机器人的稳定性和运动能力。此外,该研究还开源了MuJoCo软足数字孪生模型,为其他研究人员提供了便利。
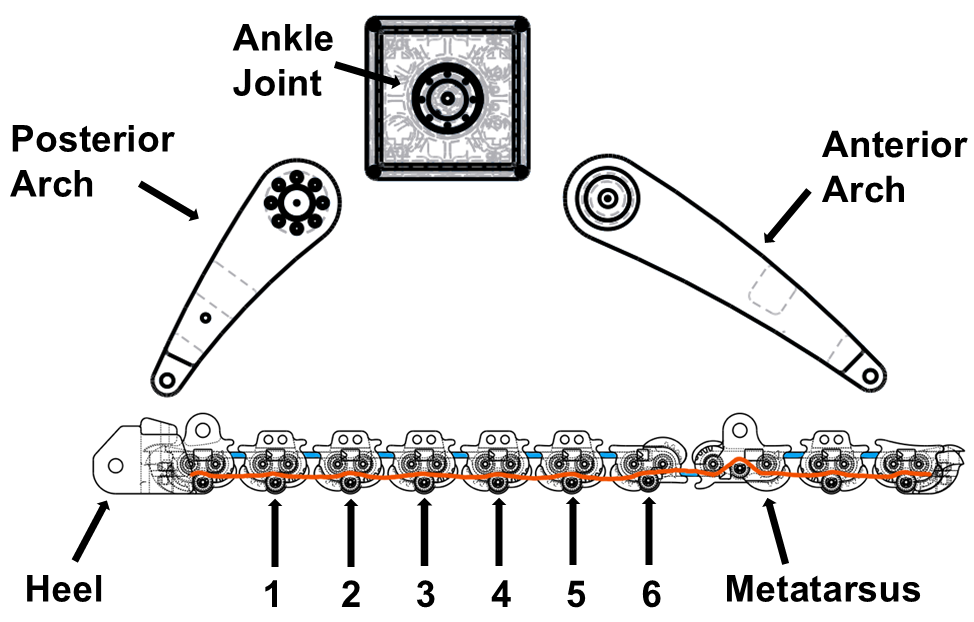
关键设计:软足的设计采用了多段式结构,每一段都由柔性材料制成,并采用欠驱动方式控制。MuJoCo模型中,关键参数包括材料的杨氏模量、泊松比,以及各段之间的连接方式。接触模型采用MuJoCo内置的摩擦模型,并根据实验数据进行调整。COMAN+机器人的控制策略保持不变,仅替换了足部模型。
🖼️ 关键图片


📊 实验亮点
实验结果表明,与原始的扁平足相比,集成自适应软足的COMAN+机器人在越过小型障碍物时的性能得到了显著提升。具体而言,在不改变控制策略的情况下,机器人能够更稳定地越过高度为5厘米的障碍物,且在越障过程中足底变形更加自然,接触力分布更加均匀。
🎯 应用场景
该研究成果可应用于腿式机器人在复杂地形下的运动控制,例如搜索救援、灾后重建、野外勘探等领域。自适应软足的设计能够提高机器人在崎岖地形上的稳定性和通过性,使其能够更好地完成任务。此外,开源的MuJoCo模型也为其他研究人员提供了便利,促进了相关技术的发展。
📄 摘要(原文)
In recent years, artificial feet based on soft robotics and under-actuation principles emerged to improve mobility on challenging terrains. This paper presents the application of the MuJoCo physics engine to realize a digital twin of an adaptive soft foot developed for use with legged robots. We release the MuJoCo soft foot digital twin as open source to allow users and researchers to explore new approaches to locomotion. The work includes the system modeling techniques along with the kinematic and dynamic attributes involved. Validation is conducted through a rigorous comparison with bench tests on a physical prototype, replicating these experiments in simulation. Results are evaluated based on sole deformation and contact forces during foot-obstacle interaction. The foot model is subsequently integrated into simulations of the humanoid robot COMAN+, replacing its original flat feet. Results show an improvement in the robot's ability to negotiate small obstacles without altering its control strategy. Ultimately, this study offers a comprehensive modeling approach for adaptive soft feet, supported by qualitative comparisons of bipedal locomotion with state of the art robotic feet.