From Mystery to Mastery: Failure Diagnosis for Improving Manipulation Policies
作者: Som Sagar, Jiafei Duan, Sreevishakh Vasudevan, Yifan Zhou, Heni Ben Amor, Dieter Fox, Ransalu Senanayake
分类: cs.RO, cs.LG
发布日期: 2024-12-03 (更新: 2025-02-08)
备注: 17 Pages, 18 figures
💡 一句话要点
提出RoboMD框架,自动诊断机器人操作策略在未知环境下的失败模式
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人操作 失败诊断 深度强化学习 视觉-语言嵌入 故障模式识别
📋 核心要点
- 现有机器人操作策略在未知环境下易失败,人工诊断耗时且易遗漏关键失败模式。
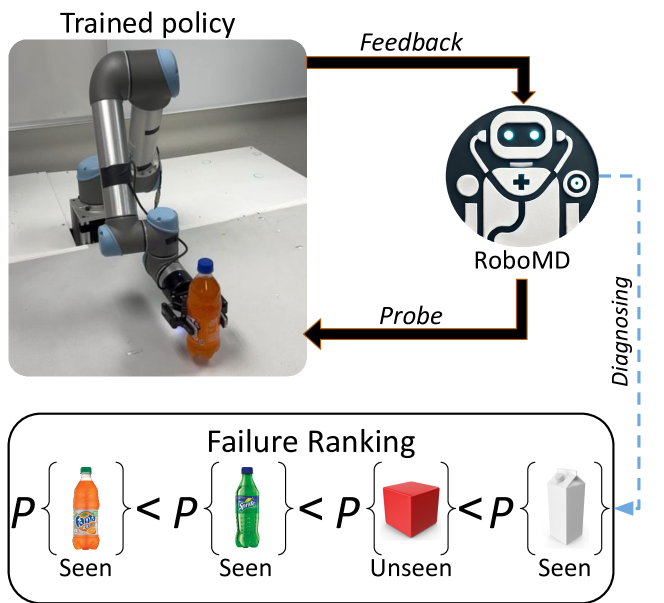
- RoboMD利用深度强化学习探索失败模式,并使用视觉-语言嵌入编码失败概念,实现自动诊断。
- 实验证明RoboMD能有效诊断非结构化环境中的未知失败,提升操作策略的鲁棒性。
📝 摘要(中文)
机器人操作策略常常因未知原因而失败,这给实际部署带来了重大挑战。研究人员通常使用启发式方法解决这些失败,但这些方法不仅耗时耗力,而且容易忽略关键的失败模式(FMs)。本文介绍了一种名为机器人操作诊断(RoboMD)的系统框架,旨在自动识别由环境中未预料到的变化引起的FMs。考虑到预训练操作策略中潜在FMs的巨大空间,我们利用深度强化学习(deep RL)来探索和发现这些FMs,使用专门训练的视觉-语言嵌入来编码失败的概念。这种方法使用户能够概率性地量化和排序先前未见过的环境条件下的失败。通过在各种操作任务和算法中进行的大量实验,我们证明了RoboMD在诊断非结构化环境中未知失败方面的有效性,为提高操作策略的鲁棒性提供了一条系统化的途径。
🔬 方法详解
问题定义:论文旨在解决机器人操作策略在未知环境中部署时,由于环境变化导致的未知失败模式难以诊断的问题。现有方法主要依赖人工启发式方法,效率低下且容易忽略某些关键的失败模式,缺乏系统性和自动化。
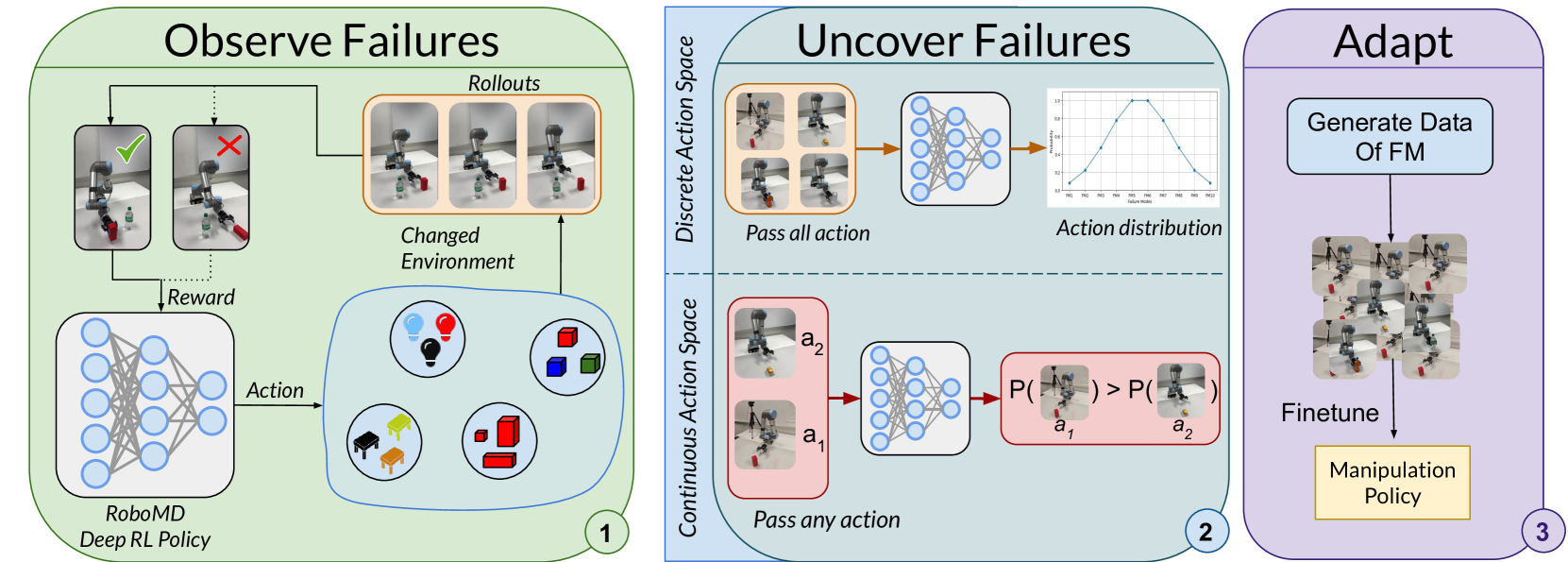
核心思路:论文的核心思路是利用深度强化学习自动探索和发现这些未知的失败模式。通过训练一个能够识别和量化失败的视觉-语言嵌入模型,RoboMD能够概率性地评估和排序不同环境条件下的失败风险,从而帮助用户快速定位和解决问题。这种方法将失败诊断问题转化为一个探索和识别的过程。
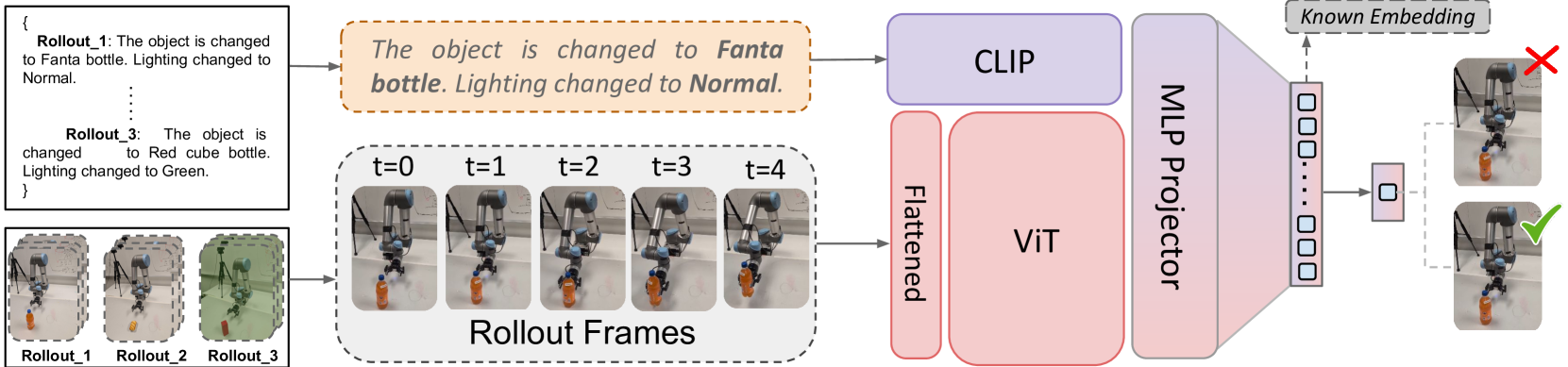
技术框架:RoboMD框架主要包含以下几个模块:1) 环境交互模块:机器人与环境进行交互,执行操作策略。2) 视觉-语言嵌入模块:该模块负责将视觉信息(例如,摄像头图像)和语言信息(例如,任务描述)编码成一个统一的嵌入向量,该向量能够捕捉失败的概念。3) 深度强化学习模块:利用深度强化学习算法,例如Q-learning或Policy Gradient,训练一个策略来探索和发现不同的失败模式。4) 失败诊断模块:根据视觉-语言嵌入和强化学习的结果,对失败模式进行量化和排序,并提供诊断报告。
关键创新:RoboMD的关键创新在于它将深度强化学习和视觉-语言嵌入结合起来,用于自动探索和诊断机器人操作策略的失败模式。与传统的人工方法相比,RoboMD能够更全面、更高效地识别和量化失败风险。此外,RoboMD还能够处理非结构化环境中的未知失败,这在实际应用中非常重要。
关键设计:视觉-语言嵌入模块的设计至关重要,需要选择合适的网络结构(例如,Transformer或CNN-RNN)和损失函数(例如,对比损失或三元组损失)来训练嵌入模型。强化学习模块需要仔细设计奖励函数,以便引导机器人探索不同的失败模式。例如,可以设置一个负奖励,当机器人遇到失败时,会受到惩罚。此外,还需要调整探索策略,例如ε-greedy或UCB,以平衡探索和利用。
🖼️ 关键图片
📊 实验亮点
实验结果表明,RoboMD能够有效地诊断非结构化环境中的未知失败。在多个操作任务中,RoboMD能够识别出人工方法难以发现的失败模式,并显著提高操作策略的成功率。具体性能数据未知,但论文强调了RoboMD在各种任务和算法中的有效性。
🎯 应用场景
RoboMD可应用于各种机器人操作任务,如工业自动化、家庭服务机器人、医疗机器人等。通过自动诊断失败模式,可以显著提高机器人操作策略的鲁棒性和可靠性,降低维护成本,加速机器人在实际场景中的部署。未来,该技术可进一步扩展到其他类型的机器人系统,如自动驾驶汽车和无人机。
📄 摘要(原文)
Robot manipulation policies often fail for unknown reasons, posing significant challenges for real-world deployment. Researchers and engineers typically address these failures using heuristic approaches, which are not only labor-intensive and costly but also prone to overlooking critical failure modes (FMs). This paper introduces Robot Manipulation Diagnosis (RoboMD), a systematic framework designed to automatically identify FMs arising from unanticipated changes in the environment. Considering the vast space of potential FMs in a pre-trained manipulation policy, we leverage deep reinforcement learning (deep RL) to explore and uncover these FMs using a specially trained vision-language embedding that encodes a notion of failures. This approach enables users to probabilistically quantify and rank failures in previously unseen environmental conditions. Through extensive experiments across various manipulation tasks and algorithms, we demonstrate RoboMD's effectiveness in diagnosing unknown failures in unstructured environments, providing a systematic pathway to improve the robustness of manipulation policies.