LLM-Enhanced Path Planning: Safe and Efficient Autonomous Navigation with Instructional Inputs
作者: Pranav Doma, Aliasghar Arab, Xuesu Xiao
分类: cs.RO, eess.SY
发布日期: 2024-12-03
💡 一句话要点
提出LLM增强的路径规划框架,实现指令引导下安全高效的自主导航
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 路径规划 大型语言模型 自主导航 人机交互 机器人 指令理解 环境感知
📋 核心要点
- 现有自主导航方法在理解复杂指令和动态环境适应性方面存在不足,尤其是在资源受限的场景下。
- 该论文提出利用LLM增强路径规划,通过分解指令和环境信息,生成安全高效的导航计划。
- 实验结果表明,该框架能够提升导航效率和安全性,并实现更好的人机交互。
📝 摘要(中文)
本文提出了一种结合大型语言模型(LLM)的路径规划框架,旨在提升资源受限环境中基于自然语言指令的自主导航能力。该框架集成了2D栅格地图和自然语言命令,通过分解高级指令和实时环境数据,为拣选任务生成结构化的导航计划,包括避障、目标优先级排序和自适应行为。系统能够动态重新计算路径以应对环境变化,并符合隐含的社会规范,从而实现无缝的人机交互。实验结果表明,LLM能够设计上下文感知的系统,从而提高工业和动态环境中的导航效率和安全性。
🔬 方法详解
问题定义:论文旨在解决在动态和资源受限环境中,机器人如何根据自然语言指令进行安全高效的自主导航的问题。现有方法在处理复杂指令、适应环境变化以及保证人机交互的自然性方面存在挑战,尤其是在工业环境中,需要同时考虑效率和安全。
核心思路:论文的核心思路是利用LLM的强大语言理解和推理能力,将高级自然语言指令分解为可执行的导航计划。LLM不仅用于理解指令,还用于根据环境信息动态调整计划,从而实现更智能、更安全的导航。
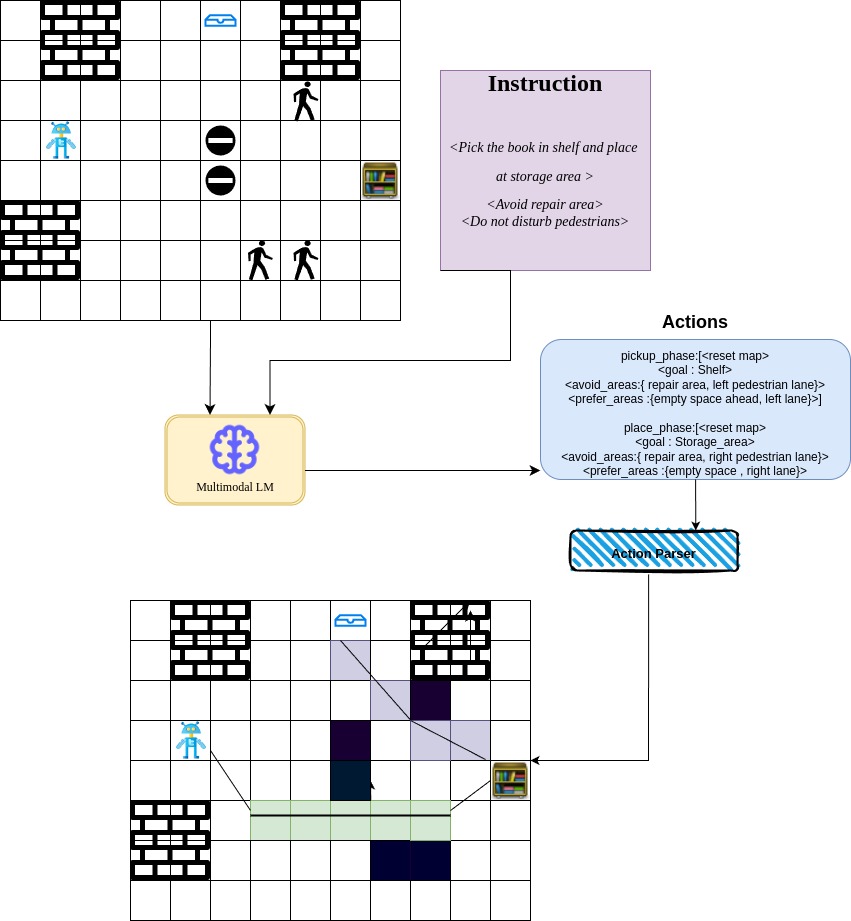
技术框架:该框架主要包含以下几个模块:1) 指令解析模块,利用LLM将自然语言指令分解为具体的导航任务;2) 环境感知模块,通过2D栅格地图获取环境信息,包括障碍物位置等;3) 路径规划模块,根据任务和环境信息生成初始路径;4) 动态调整模块,根据实时环境变化和LLM的反馈,动态调整路径,确保安全和效率。整个流程是一个循环迭代的过程,不断优化导航计划。
关键创新:该论文的关键创新在于将LLM深度集成到路径规划框架中,利用LLM进行指令理解、环境推理和动态调整。与传统的基于规则或优化的路径规划方法相比,该方法能够更好地理解人类意图,并根据环境变化做出更智能的决策。此外,该框架还考虑了人机交互的社会规范,使机器人的行为更自然。
关键设计:论文中LLM主要用于指令分解和环境推理。指令分解是将高级指令转化为一系列具体的导航目标和约束。环境推理是根据环境信息,利用LLM判断潜在的风险和机会,并调整导航策略。具体的参数设置和网络结构在论文中未详细说明,属于未知信息。
🖼️ 关键图片

📊 实验亮点
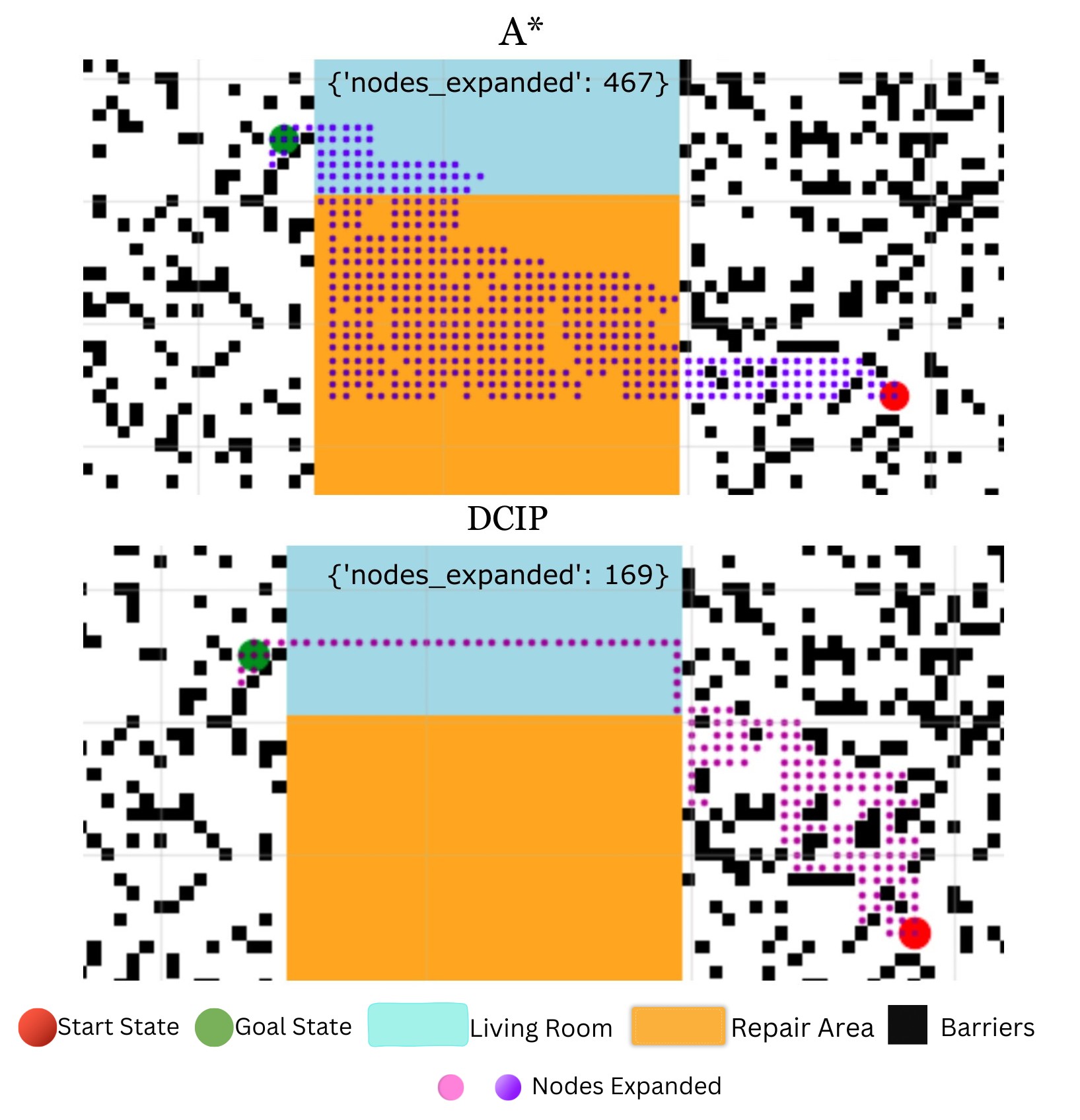
论文展示了LLM在路径规划中的潜力,通过集成LLM,机器人能够更好地理解人类指令,并在动态环境中做出更智能的决策。虽然论文中没有提供具体的性能数据和对比基线,但强调了LLM在提升导航效率和安全性方面的作用,以及在人机交互方面的优势。
🎯 应用场景
该研究成果可应用于工业自动化、仓储物流、服务机器人等领域。例如,在智能工厂中,机器人可以根据工人的自然语言指令,安全高效地完成物料搬运、设备巡检等任务。该技术还能提升人机协作效率,降低安全风险,并为未来更智能的机器人系统奠定基础。
📄 摘要(原文)
Autonomous navigation guided by natural language instructions is essential for improving human-robot interaction and enabling complex operations in dynamic environments. While large language models (LLMs) are not inherently designed for planning, they can significantly enhance planning efficiency by providing guidance and informing constraints to ensure safety. This paper introduces a planning framework that integrates LLMs with 2D occupancy grid maps and natural language commands to improve spatial reasoning and task execution in resource-limited settings. By decomposing high-level commands and real-time environmental data, the system generates structured navigation plans for pick-and-place tasks, including obstacle avoidance, goal prioritization, and adaptive behaviors. The framework dynamically recalculates paths to address environmental changes and aligns with implicit social norms for seamless human-robot interaction. Our results demonstrates the potential of LLMs to design context-aware system to enhance navigation efficiency and safety in industrial and dynamic environments.