Bridging Hard and Soft: Mechanical Metamaterials Enable Rigid Torque Transmission in Soft Robots
作者: Molly Carton, Jakub F. Kowalewski, Jiani Guo, Jacob F. Alpert, Aman Garg, Daniel Revier, Jeffrey Ian Lipton
分类: cs.RO
发布日期: 2024-12-03
💡 一句话要点
利用机械超材料,软体机器人实现刚性扭矩传递
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 机械超材料 扭矩传递 柔顺性 逆运动学 人机协作
📋 核心要点
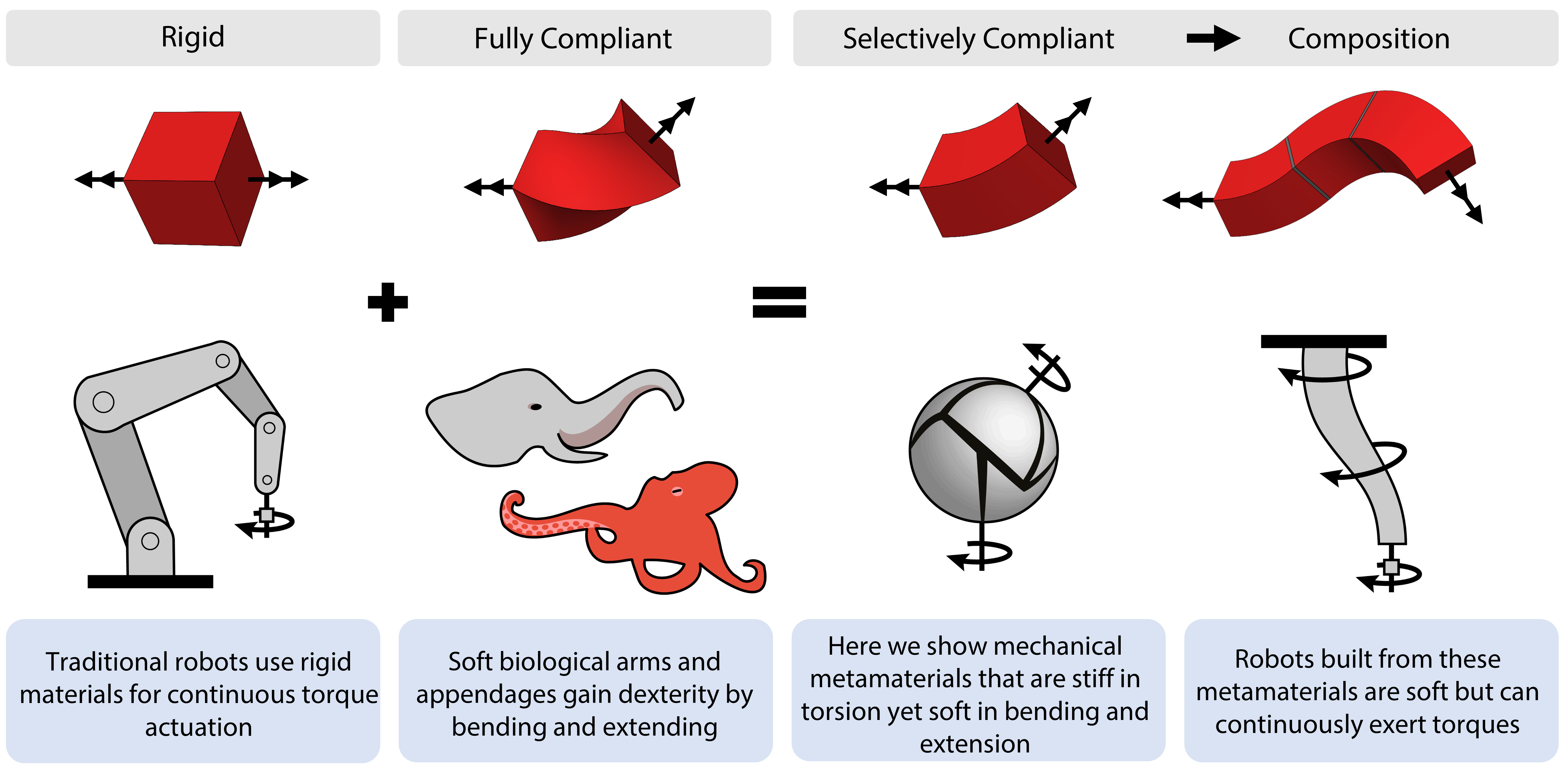
- 软体机器人手臂虽然具有生物手臂的顺应性,但难以连续传递和施加扭矩,限制了其与环境的交互能力。
- 该研究通过设计机械超材料结构,而非依赖材料本身的属性,使软体机器人手臂在保持柔顺性的同时,能够连续传递扭矩。
- 实验结果表明,该软体机器人手臂具有高运动重复性,并能通过学习逆运动学完成复杂操作,展现了其在实际应用中的潜力。
📝 摘要(中文)
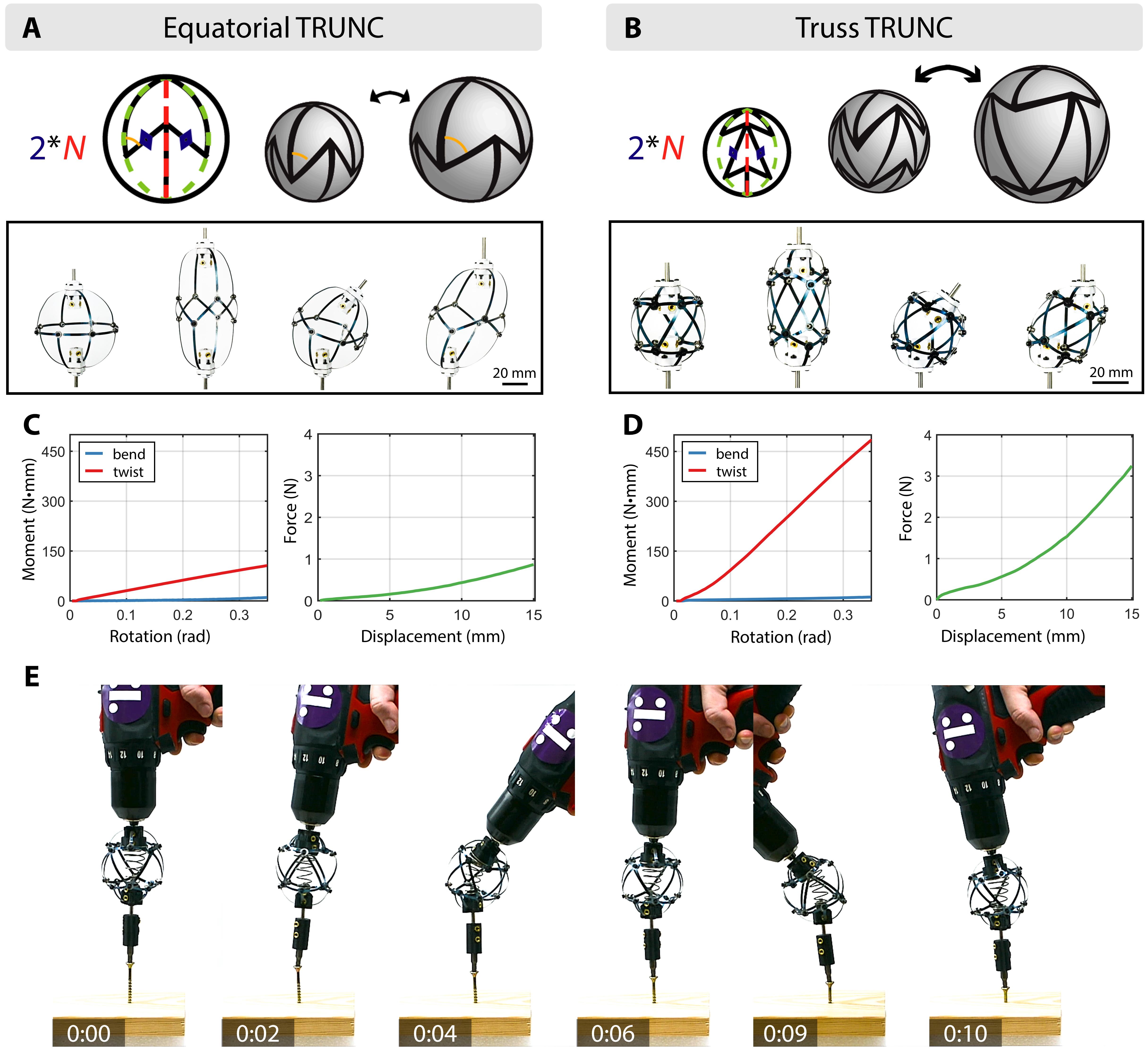
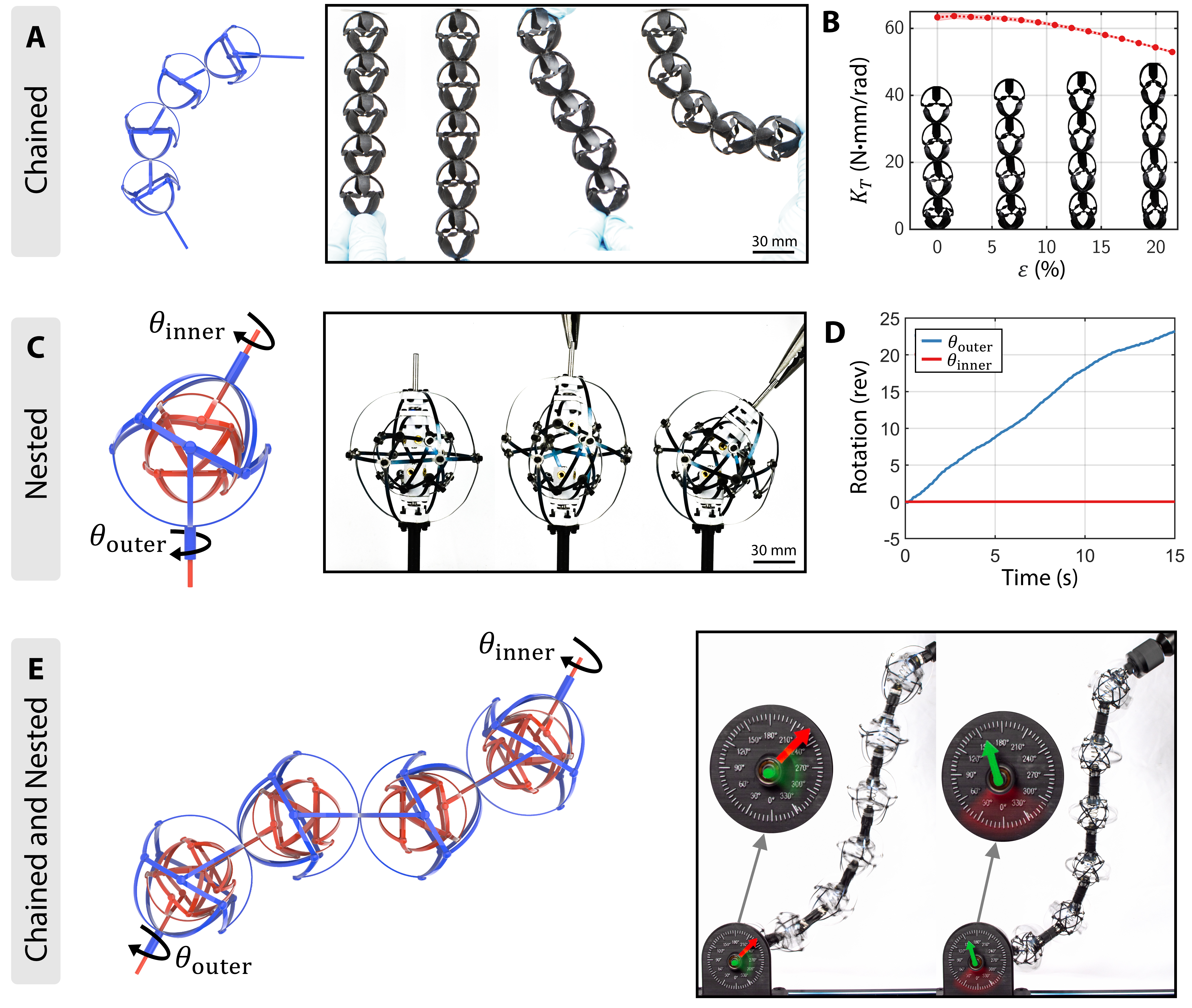
刚性和软性机器人分别擅长扭矩传递和被动顺应性。本文提出一种软体机器人手臂,它利用机械超材料作为柔顺的恒速关节,能够在保持顺应性的同时,连续地向环境传递扭矩。该关节的抗扭刚度是抗弯刚度的52倍,弯曲角度可达45°。该手臂在轨迹跟踪时具有高运动重复性(0.4 mm和0.1°)。通过训练神经网络学习逆运动学,该手臂能够完成诸如安装灯泡、拧紧螺栓和转动阀门等现有软体机器人难以完成的任务。其被动顺应性使其在人机交互中更安全,并提供了一种机械智能,使其能够在操纵物体时适应不对准。这项工作将弥合刚性和软性机器人之间的差距,应用于人机协作、仓库自动化和极端环境。
🔬 方法详解
问题定义:软体机器人通常使用柔软的材料和结构来实现弯曲和伸展等运动,但这种柔软性使得它们难以像刚性机器人那样连续传递和施加扭矩。这限制了软体机器人在需要精确扭矩控制的应用中的使用,例如拧螺丝或转动阀门等。
核心思路:该论文的核心思路是利用机械超材料的设计,在软体机器人手臂中构建具有特定力学性能的关节。这些关节被设计成在扭转方向上具有较高的刚度,而在其他方向上保持柔顺。这样,手臂就可以在保持整体柔顺性的同时,有效地传递扭矩。
技术框架:该软体机器人手臂由一对机械超材料关节组成,这些关节充当柔顺的恒速关节。整个系统通过气动或其他方式驱动,控制关节的运动。为了实现精确的运动控制,研究人员训练了一个神经网络来学习手臂的逆运动学模型。该模型可以将期望的末端执行器位置和姿态转换为关节的控制信号。
关键创新:该研究的关键创新在于将机械超材料应用于软体机器人,实现了扭矩传递和柔顺性的结合。传统的软体机器人设计通常侧重于材料本身的柔顺性,而该研究则通过结构设计来实现特定的力学性能。这种方法为软体机器人的设计提供了新的思路。
关键设计:机械超材料关节的设计是关键。这些关节被设计成在扭转方向上具有较高的刚度,而在弯曲方向上保持柔顺。具体的参数设置包括超材料单元的几何形状、尺寸和排列方式。神经网络的结构和训练方法也至关重要,需要选择合适的网络结构和损失函数,以确保逆运动学模型的准确性。
🖼️ 关键图片
📊 实验亮点
该软体机器人手臂的机械超材料关节的抗扭刚度是抗弯刚度的52倍,弯曲角度可达45°。在轨迹跟踪实验中,该手臂表现出高运动重复性,位置误差为0.4 mm,角度误差为0.1°。通过训练神经网络,该手臂成功完成了安装灯泡、拧紧螺栓和转动阀门等复杂任务,证明了其在实际应用中的可行性。
🎯 应用场景
该研究成果可应用于人机协作、仓库自动化和极端环境等领域。在人机协作中,软体机器人的柔顺性使其更安全,而扭矩传递能力使其能够完成一些需要精确操作的任务。在仓库自动化中,软体机器人可以用于搬运和操作各种形状和尺寸的物品。在极端环境中,软体机器人可以适应复杂的地形和狭小的空间。
📄 摘要(原文)
Torque and continuous rotation are fundamental methods of actuation and manipulation in rigid robots. Soft robot arms use soft materials and structures to mimic the passive compliance of biological arms that bend and extend. This use of compliance prevents soft arms from continuously transmitting and exerting torques to interact with their environment. Here, we show how relying on patterning structures instead of inherent material properties allows soft robotic arms to remain compliant while continuously transmitting torque to their environment. We demonstrate a soft robotic arm made from a pair of mechanical metamaterials that act as compliant constant-velocity joints. The joints are up to 52 times stiffer in torsion than bending and can bend up to 45°. This robot arm can continuously transmit torque while deforming in all other directions. The arm's mechanical design achieves high motion repeatability (0.4 mm and 0.1°) when tracking trajectories. We then trained a neural network to learn the inverse kinematics, enabling us to program the arm to complete tasks that are challenging for existing soft robots such as installing light bulbs, fastening bolts, and turning valves. The arm's passive compliance makes it safe around humans and provides a source of mechanical intelligence, enabling it to adapt to misalignment when manipulating objects. This work will bridge the gap between hard and soft robotics with applications in human assistance, warehouse automation, and extreme environments.