Haptic Stiffness Perception Using Hand Exoskeletons in Tactile Robotic Telemanipulation
作者: Gabriele Giudici, Claudio Coppola, Kaspar Althoefer, Ildar Farkhatdinov, Lorenzo Jamone
分类: cs.RO
发布日期: 2024-12-03
备注: 8 pages,6 figures, "This work has been submitted to the IEEE for possible publication."
💡 一句话要点
提出基于触觉反馈的手部外骨骼遥操作方案,提升远程操作中物体刚度感知能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 遥操作 触觉反馈 手部外骨骼 刚度感知 机器人 人机交互 触觉传感
📋 核心要点
- 远程操作中,仅依靠视觉反馈难以准确感知物体刚度,触觉反馈至关重要,但如何有效传递触觉信息是一个挑战。
- 该研究提出一种基于手部外骨骼的遥操作方案,结合接触力和位移信息生成触觉反馈,旨在提升操作者对远程物体刚度的感知能力。
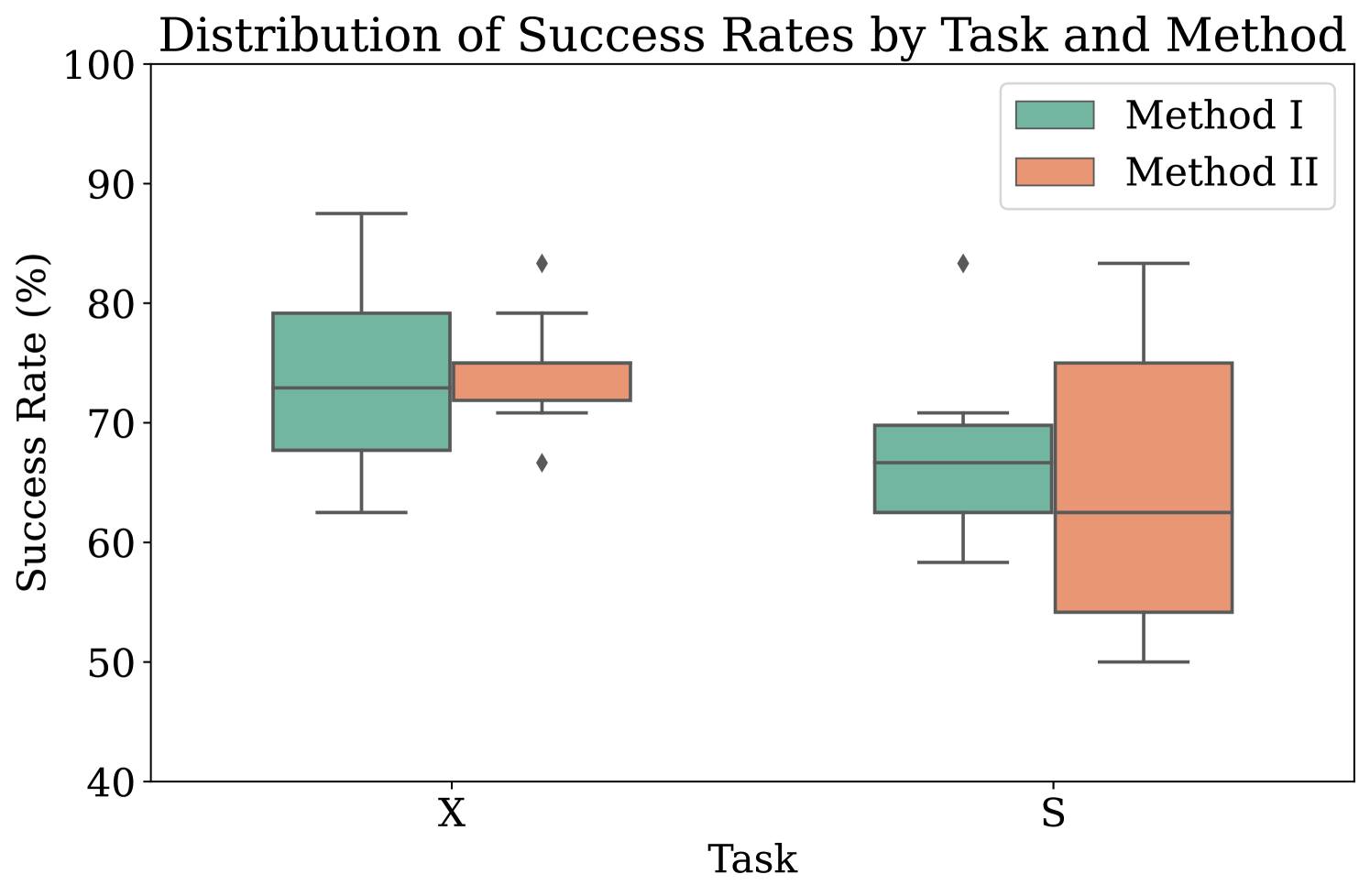
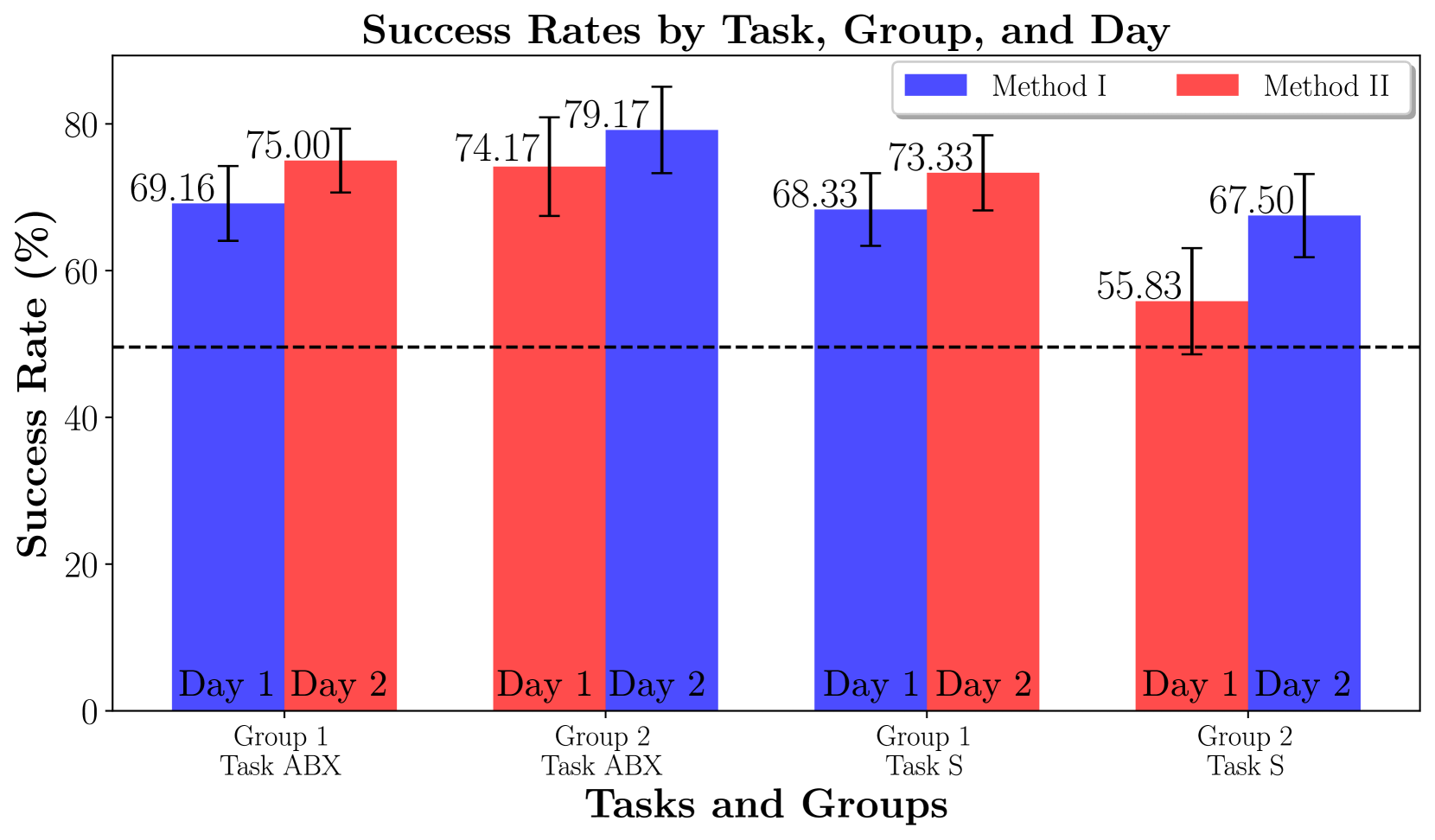
- 实验结果表明,操作者仅凭触觉反馈即可区分不同刚度的物体,且位移反馈有助于区分相似刚度的物体。
📝 摘要(中文)
机器人遥操作在医疗和恶劣环境作业等领域至关重要。视觉反馈虽能提供信息,但触觉反馈对于感知刚度等视觉难以获取的物体属性至关重要。本文首次通过实验证明,在灵巧机械手的真实遥操作中,操作者可以通过触觉传感指尖产生的触觉反馈感知远程物体的刚度。实验中,参与者通过遥操作机械手挤压软物体,使用两种触觉反馈方法:一种仅基于测量的接触力,另一种还包括主从设备之间的挤压位移。结果表明,操作者仅依靠触觉反馈就能区分不同刚度的物体。此外,研究结果表明,位移反馈组件可以增强对相似刚度物体的区分能力。
🔬 方法详解
问题定义:在机器人遥操作中,操作者难以仅通过视觉信息准确判断远程物体的刚度,这限制了遥操作的精度和效率。现有的触觉反馈方法可能不够完善,无法充分传递物体刚度信息,导致操作者难以区分不同刚度的物体。
核心思路:该论文的核心思路是利用手部外骨骼系统,结合接触力和位移信息,为操作者提供更丰富的触觉反馈。通过同时反馈接触力和位移,操作者可以更直观地感受到物体的形变程度,从而更准确地判断其刚度。
技术框架:该遥操作系统包含一个主手设备(手部外骨骼)和一个从手设备(灵巧机械手)。操作者佩戴主手设备,其动作被映射到从手设备上。从手设备上的触觉传感器测量与物体的接触力和位移,并将这些信息通过手部外骨骼反馈给操作者。系统主要包含触觉数据采集、触觉反馈生成和主从设备控制三个模块。
关键创新:该研究的关键创新在于同时考虑了接触力和位移信息,并将其用于生成触觉反馈。与仅基于接触力的反馈方法相比,该方法能够提供更全面的触觉信息,从而提高操作者对物体刚度的感知能力。此外,该研究通过实验验证了该方法的有效性。
关键设计:实验中使用了两种触觉反馈方法:一种仅基于测量的接触力,另一种还包括主从设备之间的挤压位移。通过对比这两种方法,研究人员评估了位移反馈对刚度感知的影响。具体的参数设置和控制算法在论文中未详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,操作者仅依靠触觉反馈就能有效区分不同刚度的物体,证明了触觉反馈在遥操作中的重要性。更重要的是,包含位移信息的触觉反馈方法能够显著提升操作者对相似刚度物体的区分能力,表明位移信息在刚度感知中起着关键作用。具体的性能提升数据未知。
🎯 应用场景
该研究成果可应用于医疗机器人、工业机器人、灾难救援机器人等领域。在微创手术中,医生可以通过触觉反馈更准确地感知组织器官的硬度,提高手术精度。在核电站等危险环境中,操作人员可以通过遥操作机器人安全地完成维修任务。此外,该技术还可用于虚拟现实和游戏领域,提供更逼真的触觉体验。
📄 摘要(原文)
Robotic telemanipulation - the human-guided manipulation of remote objects - plays a pivotal role in several applications, from healthcare to operations in harsh environments. While visual feedback from cameras can provide valuable information to the human operator, haptic feedback is essential for accessing specific object properties that are difficult to be perceived by vision, such as stiffness. For the first time, we present a participant study demonstrating that operators can perceive the stiffness of remote objects during real-world telemanipulation with a dexterous robotic hand, when haptic feedback is generated from tactile sensing fingertips. Participants were tasked with squeezing soft objects by teleoperating a robotic hand, using two methods of haptic feedback: one based solely on the measured contact force, while the second also includes the squeezing displacement between the leader and follower devices. Our results demonstrate that operators are indeed capable of discriminating objects of different stiffness, relying on haptic feedback alone and without any visual feedback. Additionally, our findings suggest that the displacement feedback component may enhance discrimination with objects of similar stiffness.