Human-Machine Interfaces for Subsea Telerobotics: From Soda-straw to Natural Language Interactions
作者: Adnan Abdullah, David Blow, Ruo Chen, Thanakon Uthai, Eric Jing Du, Md Jahidul Islam
分类: cs.RO
发布日期: 2024-12-02 (更新: 2025-06-02)
备注: 29 pages with 22 pages of content
💡 一句话要点
综述水下遥操作人机界面:从窄视野到自然语言交互
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 水下遥操作 人机界面 虚拟现实 自然语言处理 机器人自主性 操作员体验 数字孪生
📋 核心要点
- 现有水下遥操作人机界面存在沉浸感不足、控制不直观、缺乏标准化等问题,限制了操作效率和安全性。
- 本文核心在于系统性地回顾和分析水下遥操作人机界面的发展历程,并从操作员体验、机器人自主性和双向通信质量三个维度进行评估。
- 通过对现有文献的分析,总结了当前技术的局限性,并提出了未来水下人机界面技术的发展方向和关键挑战。
📝 摘要(中文)
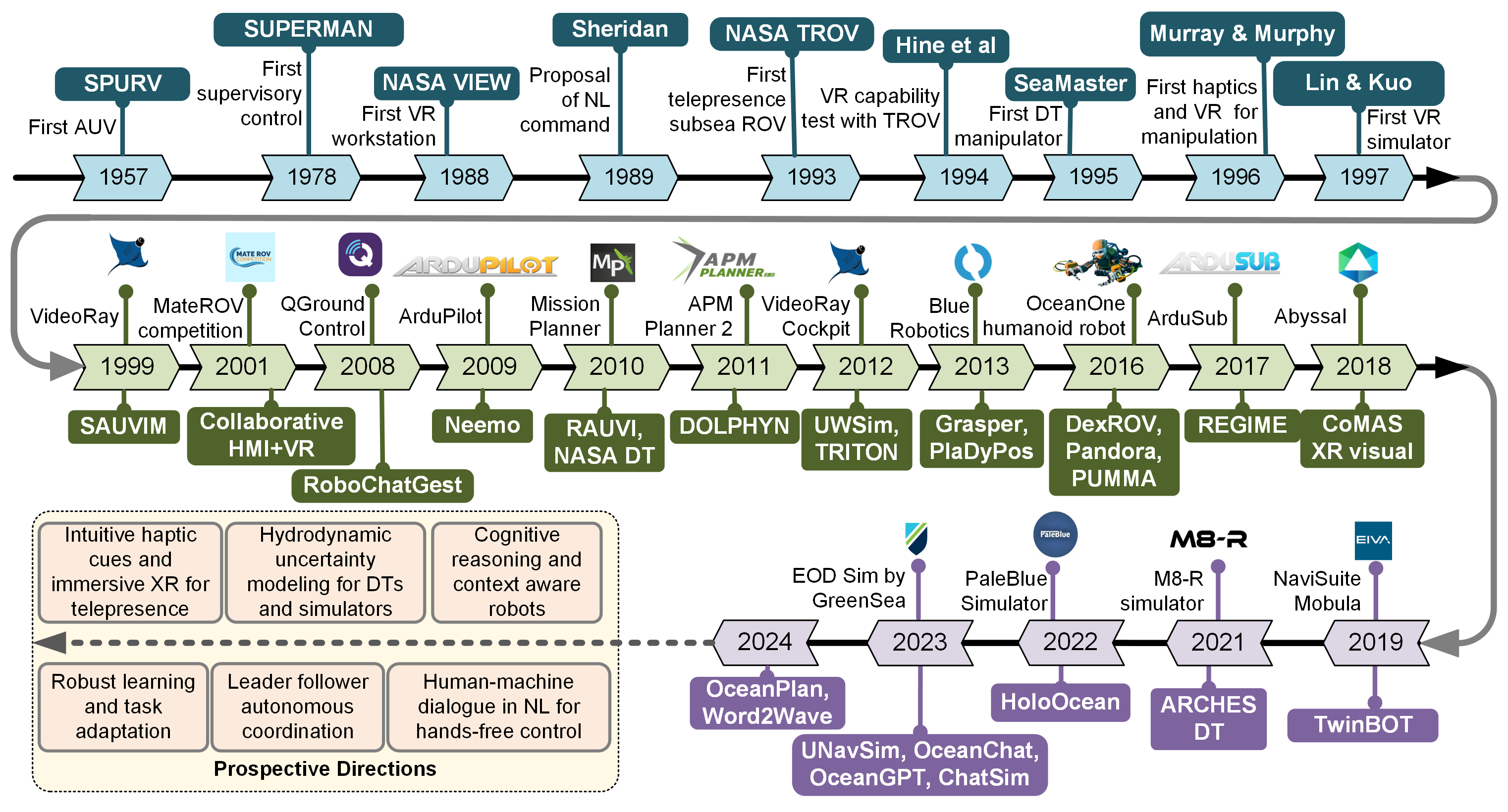
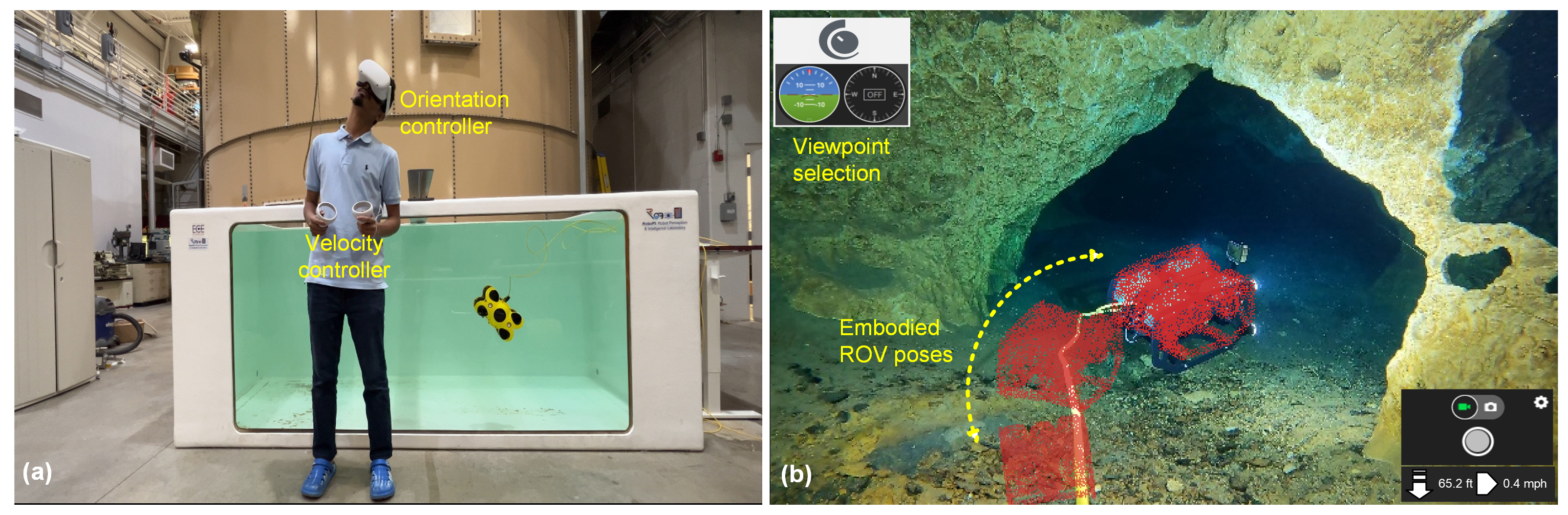
本文综述了水下遥操作人机界面(HMI)的演变,从传统的第一人称“吸管式”控制台(以狭窄视野的摄像头画面为特征)发展到利用手势识别、虚拟现实和自然语言处理的现代界面。我们从三个相互关联的角度系统地分析了最先进的文献:操作员体验(包括沉浸式反馈、认知负荷和人体工程学设计)、机器人自主性(上下文理解和任务执行)以及人机之间双向通信的质量。重点关注界面特征,以突出当前系统中的持续局限性,尤其是在沉浸式反馈保真度、直观控制机制以及缺乏跨平台标准化方面。此外,我们评估了模拟器和数字孪生作为操作员培训和系统原型设计可扩展工具的作用。本综述超越了经典的遥操作范例,考察了促进无缝人机协作的现代共享自主框架。通过综合机器人、海洋工程、人工智能和人因工程的见解,这项工作全面概述了水下HMI开发的当前形势和新兴轨迹。最后,我们确定了关键挑战和开放的研究问题,并概述了在水下遥操作中推进智能和以用户为中心的人机界面技术的前瞻性路线图。
🔬 方法详解
问题定义:水下遥操作面临的挑战在于操作员难以获得清晰的环境感知和精确的控制能力。传统“吸管式”界面视野狭窄,操作员认知负荷高,易疲劳。现有方法在沉浸式反馈、直观控制和跨平台标准化方面存在不足,影响了操作效率和安全性。
核心思路:本文的核心思路是通过综述现有文献,系统性地分析水下遥操作人机界面的发展历程,并从操作员体验、机器人自主性和双向通信质量三个维度进行评估。旨在找出当前技术的瓶颈,并为未来的研究提供指导。
技术框架:本文的框架主要包含以下几个部分:1) 回顾传统水下遥操作人机界面,分析其局限性;2) 考察现代人机界面技术,如手势识别、虚拟现实和自然语言处理在水下遥操作中的应用;3) 从操作员体验、机器人自主性和双向通信质量三个维度评估现有技术;4) 讨论模拟器和数字孪生在操作员培训和系统原型设计中的作用;5) 展望未来水下人机界面的发展方向,并提出关键挑战和开放的研究问题。
关键创新:本文的创新之处在于其系统性和全面性。它不仅回顾了传统和现代的人机界面技术,还从多个维度对现有技术进行了评估,并提出了未来发展的方向。此外,本文还强调了人机协作的重要性,并探讨了共享自主框架在水下遥操作中的应用。
关键设计:本文主要是一篇综述文章,没有提出新的算法或模型。但是,它对现有技术的分析和评估,以及对未来发展方向的展望,可以为未来的研究提供重要的参考。例如,可以基于本文的分析,设计更符合人体工程学、更直观、更智能的水下人机界面。
🖼️ 关键图片

📊 实验亮点
本文重点强调了当前水下人机界面在沉浸式反馈保真度、直观控制机制以及缺乏跨平台标准化方面的局限性。同时,评估了模拟器和数字孪生在操作员培训和系统原型设计中的作用,并展望了未来智能和以用户为中心的人机界面技术的发展。
🎯 应用场景
该研究成果可应用于水下资源勘探、水下基础设施维护、水下救援等领域。通过改进人机界面,可以提高水下作业的效率和安全性,降低操作员的认知负荷,并实现更复杂的水下任务。未来,随着技术的进步,水下遥操作将在更多领域发挥重要作用。
📄 摘要(原文)
This review explores the evolution of human-machine interfaces (HMIs) in subsea telerobotics, charting the progression from traditional first-person "soda-straw" consoles -- characterized by narrow field-of-view camera feeds -- to contemporary interfaces leveraging gesture recognition, virtual reality, and natural language processing. We systematically analyze the state-of-the-art literature through three interrelated perspectives: operator experience (including immersive feedback, cognitive workload, and ergonomic design), robotic autonomy (contextual understanding and task execution), and the quality of bidirectional communication between human and machine. Emphasis is placed on interface features to highlight persistent limitations in current systems, notably in immersive feedback fidelity, intuitive control mechanisms, and the lack of cross-platform standardization. Additionally, we assess the role of simulators and digital twins as scalable tools for operator training and system prototyping. The review extends beyond classical teleoperation paradigms to examine modern shared autonomy frameworks that facilitate seamless human-robot collaboration. By synthesizing insights from robotics, marine engineering, artificial intelligence, and human factors -- this work provides a comprehensive overview of the current landscape and emerging trajectories in subsea HMI development. Finally, we identify key challenges and open research questions and outline a forward-looking roadmap for advancing intelligent and user-centric HMI technologies in subsea telerobotics.