From Instantaneous to Predictive Control: A More Intuitive and Tunable MPC Formulation for Robot Manipulators
作者: Johan Ubbink, Ruan Viljoen, Erwin Aertbeliën, Wilm Decré, Joris De Schutter
分类: cs.RO
发布日期: 2024-12-02
备注: Accepted for the IEEE Robotics and Automation Letters
💡 一句话要点
提出一种更直观可调的预测控制方法,用于提升机器人操作臂的控制性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 机器人操作臂 参数整定 瞬时控制 预测控制
📋 核心要点
- 传统MPC控制器参数整定复杂,缺乏直观性,阻碍了其在机器人操作臂控制中的广泛应用。
- 论文提出一种新的MPC公式,旨在保留瞬时控制的直观参数整定方式,并引入预测范围以提升控制性能。
- 通过表面跟随任务验证了新公式的有效性,表明其适用于工业场景,并具有更广泛的应用潜力。
📝 摘要(中文)
模型预测控制(MPC)因其相比瞬时控制方法具有更优越的性能,在机器人操作臂控制中日益普及。然而,MPC控制器的参数整定仍然是一个巨大的挑战。为了解决这个问题,我们提出了一种实用的MPC公式,它保留了瞬时控制方法中更易于理解的整定参数,同时通过预测范围来提高性能。我们通过一个简单的例子来阐述该公式,强调了典型MPC方法中存在的实际整定挑战,并展示了所提出的公式如何缓解这些挑战。此外,该公式在一个表面跟随任务中得到了验证,证明了其在工业相关场景中的适用性。虽然这项研究是在机器人操作臂控制的背景下提出的,但我们预计该公式具有更广泛的适用性。
🔬 方法详解
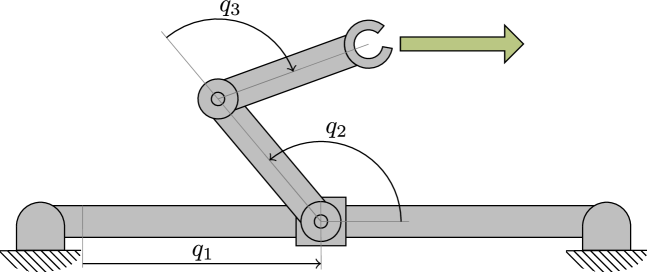
问题定义:现有的模型预测控制(MPC)方法在机器人操作臂控制中表现出优越的性能,但其参数整定过程复杂,缺乏直观性。工程师难以根据实际需求调整控制器参数,导致难以在实际工业场景中应用。瞬时控制方法虽然参数易于理解,但性能不如MPC。
核心思路:论文的核心思路是将瞬时控制的易于理解的参数整定方式与MPC的预测能力相结合。通过设计一种新的MPC公式,保留瞬时控制器的直观参数,同时利用预测范围来优化控制性能,从而在参数整定和控制性能之间取得平衡。
技术框架:该方法的核心在于重新设计MPC的优化目标和约束。具体流程包括:1) 定义机器人操作臂的动力学模型;2) 基于瞬时控制器的参数化形式,构建MPC的优化目标函数,例如,将瞬时控制器的增益矩阵作为MPC优化目标的一部分;3) 引入预测范围,在预测范围内优化控制输入,以提高控制性能;4) 考虑实际约束,例如关节角度和速度限制,将其纳入MPC的约束条件中。
关键创新:该方法最重要的创新在于将瞬时控制器的参数直接融入到MPC的优化目标中。与传统的MPC方法不同,该方法不需要重新设计复杂的权重矩阵,而是直接利用已有的瞬时控制器的参数,从而简化了参数整定过程。这种方法使得工程师可以像调整瞬时控制器一样调整MPC的参数,大大提高了控制器的可调性。
关键设计:关键设计包括:1) 如何将瞬时控制器的参数有效地融入到MPC的优化目标中,例如,可以将瞬时控制器的增益矩阵作为MPC优化目标的一部分,并对其进行微调;2) 如何选择合适的预测范围,预测范围过短可能无法充分利用MPC的预测能力,预测范围过长则会增加计算复杂度;3) 如何处理实际约束,例如关节角度和速度限制,以确保控制器的安全性和可靠性。
🖼️ 关键图片

📊 实验亮点
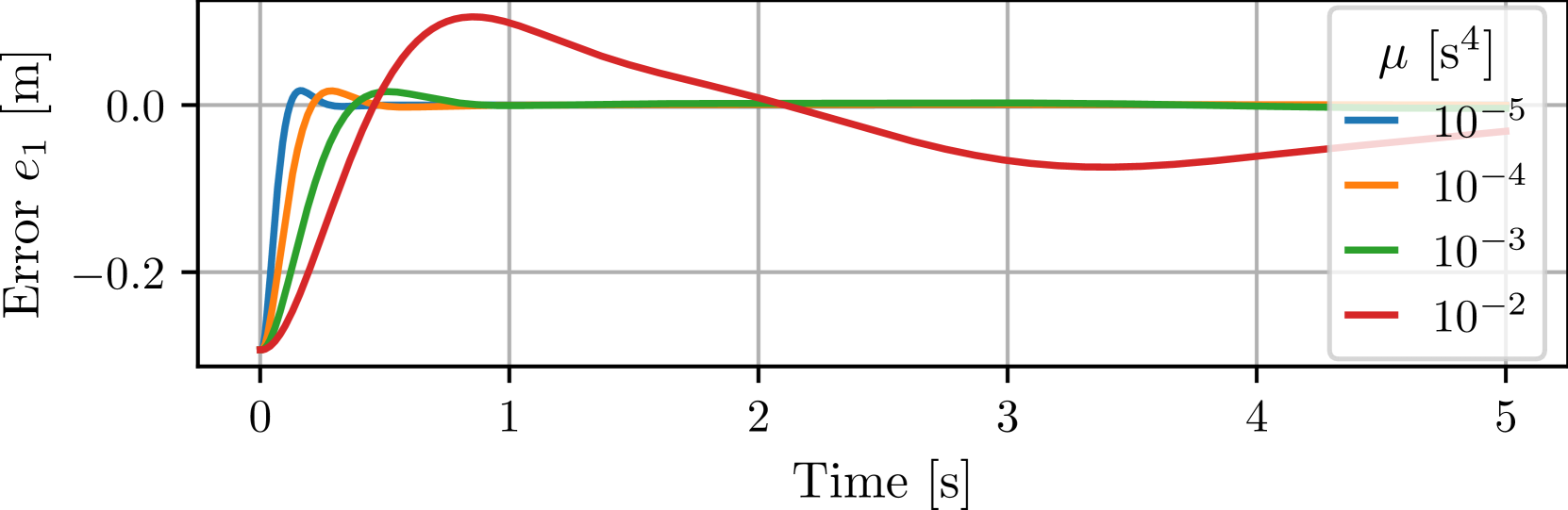
该论文通过表面跟随任务验证了所提出的MPC公式的有效性。实验结果表明,该方法在保持瞬时控制器的易调性的同时,能够显著提高控制性能。具体的性能数据(例如,跟踪误差、响应时间等)未知,但论文强调该方法适用于工业相关场景,表明其具有实际应用价值。
🎯 应用场景
该研究成果可广泛应用于工业机器人、服务机器人等领域,尤其适用于需要高精度和高动态性能的机器人控制任务,例如表面打磨、焊接、装配等。通过简化MPC控制器的参数整定过程,可以降低机器人控制系统的开发和维护成本,加速机器人在各行业的普及应用。此外,该方法也可能推广到其他控制领域,例如无人机、自动驾驶等。
📄 摘要(原文)
Model predictive control (MPC) has become increasingly popular for the control of robot manipulators due to its improved performance compared to instantaneous control approaches. However, tuning these controllers remains a considerable hurdle. To address this hurdle, we propose a practical MPC formulation which retains the more interpretable tuning parameters of the instantaneous control approach while enhancing the performance through a prediction horizon. The formulation is motivated at hand of a simple example, highlighting the practical tuning challenges associated with typical MPC approaches and showing how the proposed formulation alleviates these challenges. Furthermore, the formulation is validated on a surface-following task, illustrating its applicability to industrially relevant scenarios. Although the research is presented in the context of robot manipulator control, we anticipate that the formulation is more broadly applicable.