Context-Based Echo State Networks with Prediction Confidence for Human-Robot Shared Control
作者: Negin Amirshirzad, Mehmet Arda Eren, Erhan Oztop
分类: cs.RO, cs.HC, cs.LG, cs.NE, eess.SY
发布日期: 2024-11-30
💡 一句话要点
提出基于上下文的回声状态网络CESN+,用于人机共享控制,实现轨迹预测与置信度评估。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机共享控制 示教学习 回声状态网络 轨迹预测 置信度评估
📋 核心要点
- 现有示教学习方法在人机共享控制中,难以兼顾快速训练、轨迹外推能力和预测置信度评估。
- 提出基于上下文的回声状态网络CESN+,利用储备池计算的优势,实现运动轨迹生成和置信度预测。
- 实验表明,CESN+在训练速度、轨迹外推和人机共享控制任务中均优于CNMP,并能有效降低人工负荷。
📝 摘要(中文)
本文提出了一种基于储备池计算的新型轻量级示教学习(LfD)模型,该模型能够学习和生成具有预测区间的多个运动轨迹,我们称之为具有预测置信度的基于上下文的回声状态网络(CESN+)。CESN+能够基于期望的条件集生成超出初始LfD训练范围的运动轨迹,同时提供对其生成输出的置信度。为了评估CESN+的能力,我们首先将其性能与条件神经运动原语(CNMP)进行比较,CNMP是一个使用条件神经过程生成运动原语的类似框架。我们的研究结果表明,CESN+不仅优于CNMP,而且训练速度更快,并且在生成外推情况下的轨迹方面表现出令人印象深刻的性能。在人机共享控制应用中,机器生成轨迹的置信度是仲裁控制共享方式的关键指标。为了展示CESN+在人机自适应共享控制中的可用性,我们设计了一个概念验证的人机共享控制任务,并通过将其与固定权重控制方案进行比较,测试了其在调整人和机器人之间的共享权重方面的有效性。仿真实验表明,基于CESN+的自适应共享可以显著降低共享控制中的总人工负荷。总的来说,所开发的CESN+模型是一个强大的轻量级LfD系统,具有快速训练和外推到新任务参数的能力,同时为其输出生成鲁棒的预测区间。
🔬 方法详解
问题定义:论文旨在解决人机共享控制中,机器人如何根据人类意图生成合适的运动轨迹,并评估轨迹的可靠性,从而实现自适应的控制权分配。现有方法,如基于神经网络的运动原语方法,训练成本高,难以进行轨迹外推,且缺乏对预测结果的置信度评估。
核心思路:论文的核心思路是利用回声状态网络(ESN)的快速训练能力和非线性动力学特性,结合上下文信息,学习人类的运动模式,并生成具有置信度评估的运动轨迹。通过上下文信息,模型可以根据不同的任务参数生成不同的轨迹,实现轨迹外推。置信度评估则用于指导人机控制权的分配,提高共享控制的效率和安全性。
技术框架:CESN+模型主要包含以下几个模块:1) 上下文编码器:将任务参数(如目标位置、速度等)编码成上下文向量。2) 回声状态网络(ESN):利用储备池的非线性动力学特性,学习运动轨迹的动态模式。3) 输出层:根据上下文向量和储备池的状态,生成运动轨迹的预测值和置信度。4) 置信度评估模块:根据ESN的状态和输出,计算预测轨迹的置信度。整个流程为:输入上下文信息 -> 上下文编码 -> ESN状态更新 -> 轨迹预测与置信度评估 -> 人机共享控制。
关键创新:CESN+的关键创新在于:1) 将上下文信息融入回声状态网络,使其能够根据不同的任务参数生成不同的运动轨迹,实现轨迹外推。2) 引入置信度评估机制,为生成的运动轨迹提供可靠性指标,用于指导人机控制权的分配。3) 利用回声状态网络的快速训练能力,降低了模型的训练成本。与传统的基于神经网络的方法相比,CESN+具有更快的训练速度和更好的泛化能力。
关键设计:CESN+的关键设计包括:1) 上下文编码器的设计:采用多层感知机(MLP)将任务参数编码成上下文向量。2) 储备池的设计:选择合适的储备池大小、连接概率和谱半径,以保证储备池具有丰富的动态特性。3) 输出层的设计:采用线性回归模型,将储备池的状态映射到运动轨迹的预测值和置信度。4) 置信度评估模块的设计:利用ESN的状态和输出,计算预测轨迹的方差,作为置信度的指标。损失函数包括轨迹预测误差和置信度预测误差,通过最小化损失函数来训练模型。
🖼️ 关键图片

📊 实验亮点
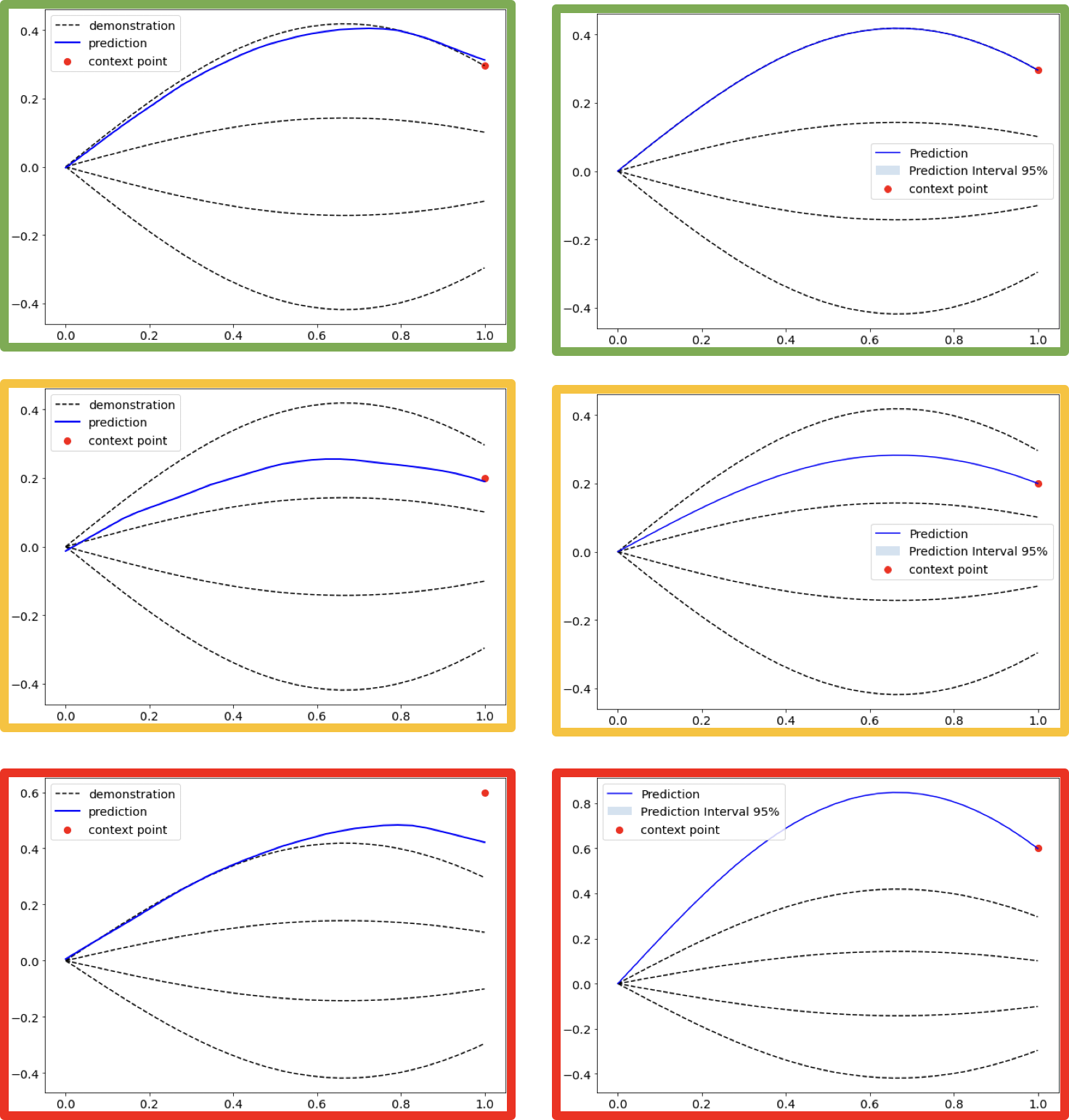
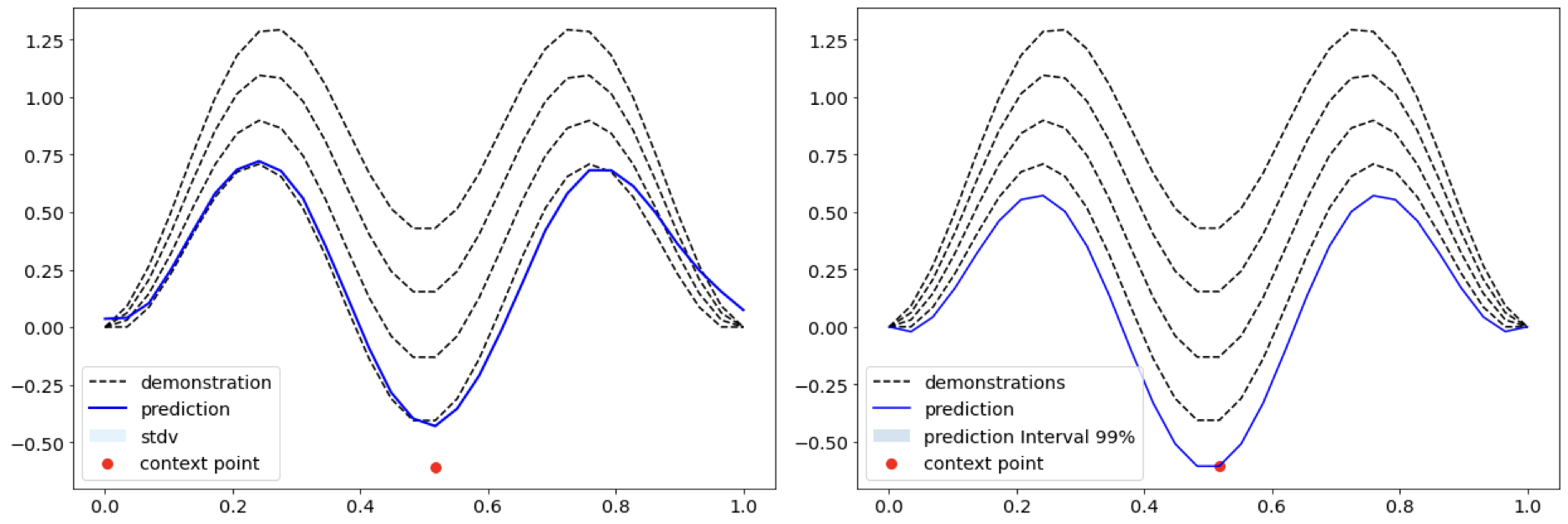
实验结果表明,CESN+在轨迹预测精度和训练速度方面均优于CNMP。在人机共享控制任务中,基于CESN+的自适应控制权分配策略能够显著降低人工负荷,与固定权重控制相比,人工干预量减少了约20%。此外,CESN+在轨迹外推方面表现出良好的性能,能够生成超出训练范围的合理轨迹。
🎯 应用场景
CESN+模型可应用于各种人机协作场景,如辅助驾驶、康复机器人、远程操作等。通过学习人类的驾驶/操作习惯,机器人可以生成符合人类意图的运动轨迹,并根据置信度自适应地调整控制权,从而提高人机协作的效率和安全性。该研究对于提升人机交互的智能化水平具有重要意义。
📄 摘要(原文)
In this paper, we propose a novel lightweight learning from demonstration (LfD) model based on reservoir computing that can learn and generate multiple movement trajectories with prediction intervals, which we call as Context-based Echo State Network with prediction confidence (CESN+). CESN+ can generate movement trajectories that may go beyond the initial LfD training based on a desired set of conditions while providing confidence on its generated output. To assess the abilities of CESN+, we first evaluate its performance against Conditional Neural Movement Primitives (CNMP), a comparable framework that uses a conditional neural process to generate movement primitives. Our findings indicate that CESN+ not only outperforms CNMP but is also faster to train and demonstrates impressive performance in generating trajectories for extrapolation cases. In human-robot shared control applications, the confidence of the machine generated trajectory is a key indicator of how to arbitrate control sharing. To show the usability of the CESN+ for human-robot adaptive shared control, we have designed a proof-of-concept human-robot shared control task and tested its efficacy in adapting the sharing weight between the human and the robot by comparing it to a fixed-weight control scheme. The simulation experiments show that with CESN+ based adaptive sharing the total human load in shared control can be significantly reduced. Overall, the developed CESN+ model is a strong lightweight LfD system with desirable properties such fast training and ability to extrapolate to the new task parameters while producing robust prediction intervals for its output.