Grasping and Rolling In-plane Manipulation Using Deployable Tape spring Appendages
作者: Gengzhi He, Curtis Sparks, Nicholas Gravish
分类: cs.RO
发布日期: 2024-11-29
💡 一句话要点
GRIP-tape:利用可展开带簧结构实现平面抓取和滚动操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 可展开结构 带簧机构 机械臂 平面操作 抓取 滚动 连续运动学 双臂机器人
📋 核心要点
- 传统刚性机械臂在工作范围和存储体积之间存在矛盾,增大工作范围需要更长的连杆,导致重量和存储体积增加。
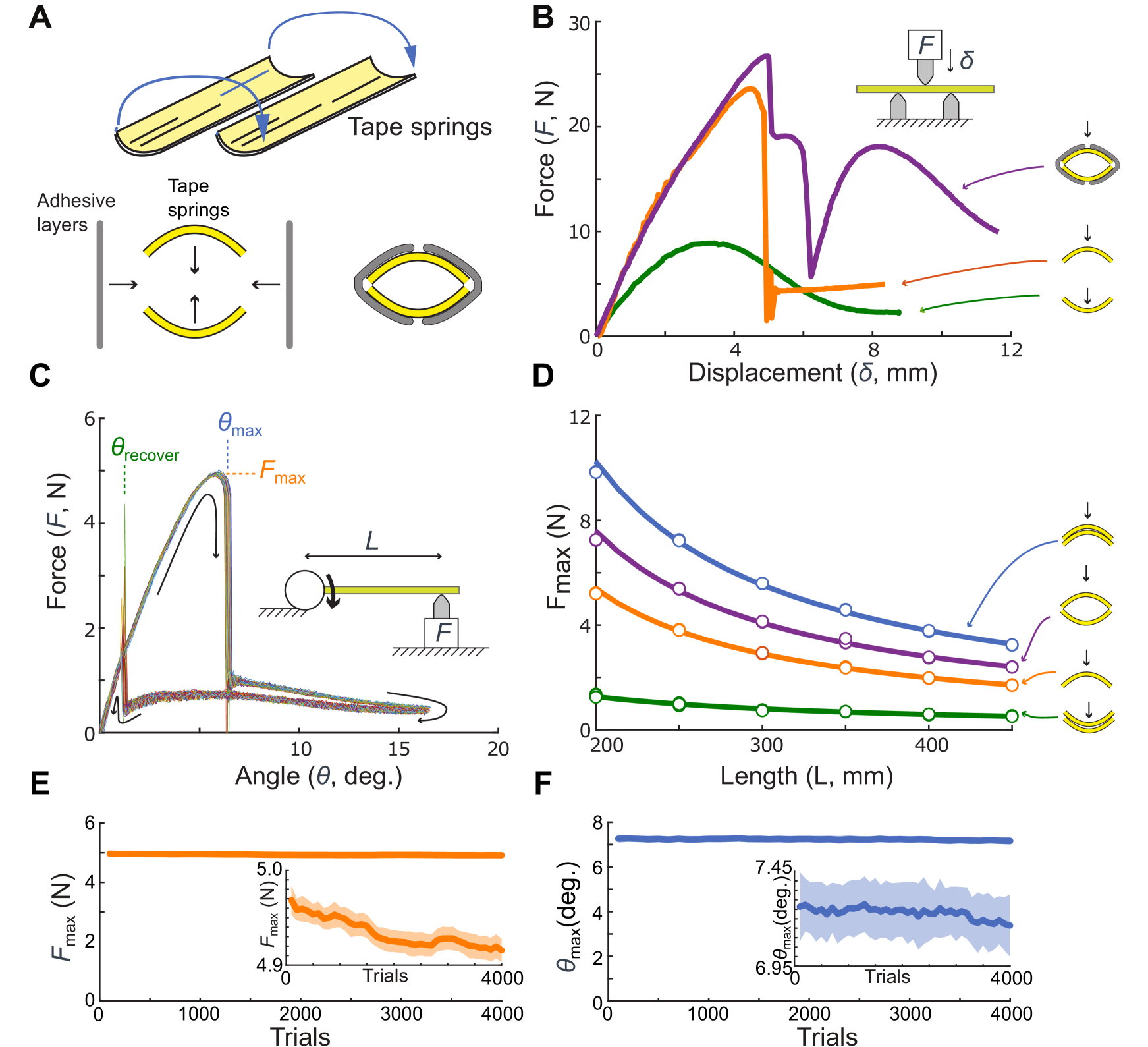
- 论文提出基于双向带簧的可展开结构,兼顾大工作空间和小存储体积,并通过GRIP-tape机器人验证其操作能力。
- 实验证明,该结构能够实现同步平移-旋转和多物体输送等新颖操作,并具备固有安全性和软接触能力。
📝 摘要(中文)
本文提出了一种基于双向带簧结构的可展开机械臂,旨在解决传统刚性多连杆机械臂在工作空间和存储体积之间的权衡问题。该结构可在紧凑状态下存储,并展开以执行操作任务,从而实现大的操作空间和小的存储体积。双向带簧结构相比于单带簧结构具有更大的屈曲强度,同时保持了卷绕成紧凑存储体积的能力。该结构被集成到一个名为GRIP-tape的双臂操作机器人中,该机器人能够在平面配置中进行物体抓取和滚动操作。实验表明,带簧的连续运动学能够实现新颖的操作能力,例如同步平移-旋转和多物体输送。此外,带簧的刚度和柔软度双重机械性能使其在工作空间内能够固有地避免意外碰撞,并与物体进行软接触。该系统为可扩展机械臂提供了新的机会,可能有利于在太空和深海等远程环境中进行操作。
🔬 方法详解
问题定义:传统刚性多连杆机械臂在工作空间和存储体积之间存在固有的矛盾。为了扩大工作空间,需要增加连杆的长度,但这会导致机械臂的重量增加,并且需要更大的存储空间。因此,如何在保证机械臂具有足够大的工作空间的同时,减小其存储体积,是一个重要的挑战。
核心思路:本文的核心思路是利用可展开的带簧结构来解决上述问题。带簧结构具有很高的可扩展性,可以在紧凑状态下存储,并在需要时展开以执行操作任务。通过使用双向带簧结构,可以进一步提高结构的屈曲强度,使其能够承受更大的载荷。
技术框架:GRIP-tape机器人由两个带簧结构组成,每个带簧结构都连接到一个末端执行器。整个系统可以控制带簧的展开和弯曲,从而实现对末端执行器的精确控制。该系统采用连续运动学模型来描述带簧的运动,并使用优化算法来规划带簧的运动轨迹。
关键创新:该论文的关键创新在于将双向带簧结构应用于机械臂的设计中,并实现了平面抓取和滚动操作。双向带簧结构相比于单带簧结构具有更高的屈曲强度,这使得机械臂能够承受更大的载荷。此外,该系统还能够实现同步平移-旋转和多物体输送等新颖的操作能力。
关键设计:带簧的材料选择、几何尺寸以及连接方式是关键的设计参数。论文中可能讨论了这些参数对机械臂性能的影响,并给出了相应的优化方案。此外,控制算法的设计也是一个关键的环节,需要保证机械臂能够精确地执行各种操作任务。具体的参数设置、损失函数、网络结构等技术细节未知。
🖼️ 关键图片


📊 实验亮点
GRIP-tape机器人展示了同步平移-旋转和多物体输送等新颖操作能力,验证了带簧结构的有效性。带簧的刚度和柔软度双重机械性能使其在工作空间内能够固有地避免意外碰撞,并与物体进行软接触,提升了操作安全性。具体的性能数据、对比基线、提升幅度等未知。
🎯 应用场景
该研究成果可应用于空间探索、深海作业等远程环境,在这些场景中,机械臂需要在有限的空间内展开并执行复杂的任务。此外,该技术还可用于医疗机器人、救援机器人等领域,为这些领域的应用提供新的解决方案。该研究的潜在价值在于提高机械臂的灵活性和适应性,使其能够更好地适应各种复杂环境。
📄 摘要(原文)
Rigid multi-link robotic arms face a tradeoff between their overall reach distance (the workspace), and how compactly they can be collapsed (the storage volume). Increasing the workspace of a robot arm requires longer links, which adds weight to the system and requires a larger storage volume. However, the tradeoff between workspace and storage volume can be resolved by the use of deployable structures with high extensibility. In this work we introduce a bidirectional tape spring based structure that can be stored in a compact state and then extended to perform manipulation tasks, allowing for a large manipulation workspace and low storage volume. Bidirectional tape springs are demonstrated to have large buckling strength compared to single tape springs, while maintaining the ability to roll into a compact storage volume. Two tape spring structures are integrated into a bimanual manipulator robot called GRIP-tape that allows for object Grasping and Rolling In Planar configurations (GRIP). In demonstrations we show that the continuum kinematics of the tape springs enable novel manipulation capabilities such as simultaneous translation-rotation and multi-object conveyance. Furthermore, the dual mechanical properties of stiffness and softness in the tape springs enables inherent safety from unintended collisions within the workspace and soft-contact with objects. Our system demonstrates new opportunities for extensible manipulators that may benefit manipulation in remote environments such as space and the deep sea.