A Systematic Study of Multi-Agent Deep Reinforcement Learning for Safe and Robust Autonomous Highway Ramp Entry
作者: Larry Schester, Luis E. Ortiz
分类: cs.RO, cs.AI, cs.LG, cs.MA, eess.SY
发布日期: 2024-11-21 (更新: 2025-01-17)
备注: 9 pages, 9 figures; added support ack
💡 一句话要点
提出基于多智能体深度强化学习的高速公路匝道安全汇入方法
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 多智能体强化学习 深度强化学习 自动驾驶 匝道汇入 安全控制
📋 核心要点
- 现有自动驾驶在高速公路匝道汇入等场景仍面临安全性和鲁棒性挑战,难以实现完全自动驾驶(L5级别)。
- 采用博弈论的多智能体深度强化学习方法,通过自博弈学习安全控制策略,解决匝道汇入的碰撞风险问题。
- 实验表明,该方法在多智能体交互场景下,能够学习到接近理想最优控制器的性能,提升了安全性。
📝 摘要(中文)
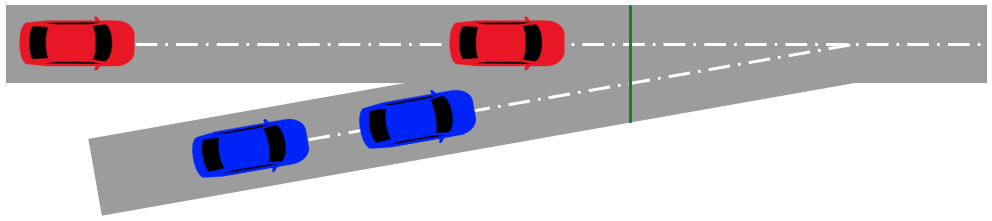
本文系统性地研究了高速公路匝道汇入问题,旨在通过控制车辆的前进动作,最小化与高速公路主路交通流的碰撞风险,从而实现安全可靠的自动驾驶。我们采用博弈论的多智能体(MA)方法,并研究了基于深度强化学习(DRL)的控制器。MA DRL的虚拟环境使用自博弈和模拟数据,使汇入车辆安全地学习在渐变式汇入过程中控制纵向位置。本文扩展了现有工作,研究了两个以上车辆(智能体)的交互,并通过系统地扩展道路场景中的交通和汇入车辆来实现。虽然先前在双车场景下的研究表明,在完全分散、非协调的环境中,无碰撞控制器在理论上是不可能的,但我们的实验结果表明,使用本文方法学习的控制器在与理想化的最优控制器相比时,表现接近理想水平。
🔬 方法详解
问题定义:论文旨在解决高速公路匝道汇入场景下的车辆安全控制问题。现有方法在处理多车辆交互时,尤其是在完全分散、非协调的环境中,难以保证无碰撞,理论上甚至被证明是不可能实现的。因此,如何设计一种能够适应复杂交通环境,保证汇入车辆安全性的控制策略是本研究的核心问题。
核心思路:论文的核心思路是将匝道汇入问题建模为一个多智能体博弈问题,每个车辆都是一个智能体,通过深度强化学习算法学习最优的控制策略。这种方法能够考虑到车辆之间的相互影响,从而在复杂的交通环境中做出更合理的决策。通过自博弈的方式,智能体可以在模拟环境中不断学习和优化策略,提高其在真实环境中的适应性和鲁棒性。
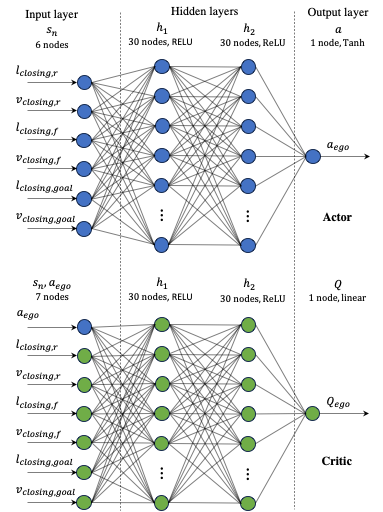
技术框架:整体框架包括一个虚拟交通环境和一个多智能体深度强化学习系统。虚拟交通环境用于模拟高速公路匝道汇入场景,包括主路车辆和汇入车辆。多智能体深度强化学习系统由多个智能体组成,每个智能体控制一个车辆。智能体通过观察环境状态,选择动作,并根据环境反馈获得奖励。整个学习过程采用自博弈的方式,即智能体之间相互博弈,不断优化各自的策略。
关键创新:最重要的技术创新点在于将多智能体深度强化学习应用于高速公路匝道汇入问题,并成功地在多车辆交互场景下学习到了接近理想最优控制器的性能。与现有方法相比,该方法能够更好地处理车辆之间的相互影响,从而在复杂的交通环境中做出更合理的决策。此外,通过自博弈的方式,智能体可以在模拟环境中不断学习和优化策略,提高其在真实环境中的适应性和鲁棒性。
关键设计:论文中关键的设计包括奖励函数的设计、网络结构的选择以及训练参数的设置。奖励函数的设计需要考虑到安全性、效率和舒适性等多个因素。网络结构的选择需要考虑到环境状态的复杂性和动作空间的维度。训练参数的设置需要仔细调整,以保证学习过程的稳定性和收敛性。具体的网络结构和参数设置在论文中没有详细说明,属于未知信息。
🖼️ 关键图片

📊 实验亮点
论文通过实验验证了所提出的多智能体深度强化学习方法在高速公路匝道汇入场景下的有效性。实验结果表明,该方法学习到的控制器在与理想化的最优控制器相比时,表现接近理想水平。虽然具体的性能数据和提升幅度未知,但实验结果表明该方法在多车辆交互场景下具有良好的性能和鲁棒性。
🎯 应用场景
该研究成果可应用于高级驾驶辅助系统(ADAS)和自动驾驶系统,提高高速公路匝道汇入的安全性、效率和舒适性。通过将该方法集成到车辆的控制系统中,可以实现更智能、更安全的匝道汇入功能,减少交通事故的发生,提高交通效率,并为未来的完全自动驾驶提供技术支持。
📄 摘要(原文)
Vehicles today can drive themselves on highways and driverless robotaxis operate in major cities, with more sophisticated levels of autonomous driving expected to be available and become more common in the future. Yet, technically speaking, so-called "Level 5" (L5) operation, corresponding to full autonomy, has not been achieved. For that to happen, functions such as fully autonomous highway ramp entry must be available, and provide provably safe, and reliably robust behavior to enable full autonomy. We present a systematic study of a highway ramp function that controls the vehicles forward-moving actions to minimize collisions with the stream of highway traffic into which a merging (ego) vehicle enters. We take a game-theoretic multi-agent (MA) approach to this problem and study the use of controllers based on deep reinforcement learning (DRL). The virtual environment of the MA DRL uses self-play with simulated data where merging vehicles safely learn to control longitudinal position during a taper-type merge. The work presented in this paper extends existing work by studying the interaction of more than two vehicles (agents) and does so by systematically expanding the road scene with additional traffic and ego vehicles. While previous work on the two-vehicle setting established that collision-free controllers are theoretically impossible in fully decentralized, non-coordinated environments, we empirically show that controllers learned using our approach are nearly ideal when measured against idealized optimal controllers.