Tactile-based force estimation for interaction control with robot fingers
作者: Elie Chelly, Andrea Cherubini, Philippe Fraisse, Faiz Ben Amar, Mahdi Khoramshahi
分类: cs.RO
发布日期: 2024-11-20 (更新: 2025-03-10)
备注: 8 pages, 5 figures, submitted to IROS 2025
💡 一句话要点
提出一种数据高效的触觉力估计方法,用于机器人手指交互控制。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉感知 力估计 机器人控制 数据高效校准 导纳控制
📋 核心要点
- 现有触觉传感器在机器人手上进行精确力估计面临挑战,尤其是在复杂表面和非线性变形情况下。
- 论文提出一种数据高效的校准方法,实现快速全阵列力估计,并考虑非线性和变形效应。
- 实验结果表明,该方法在Allegro Hand上实现了精确的力施加,误差范围为0.12+/-0.08 [N]。
📝 摘要(中文)
精细灵巧的操作需要基于机械臂-物体交互的丰富感知的反应控制。触觉传感器阵列提供了机械臂表面丰富的接触信息。然而,它们的实现面临两个主要挑战:在像机器人手这样复杂的表面上进行精确的力估计,以及将这些估计集成到反应控制回路中。我们提出了一种数据高效的校准方法,该方法能够快速地进行全阵列的力估计,适用于不同的几何形状,并提供考虑非线性和变形效应的在线反馈。我们的力估计模型在在线闭环控制系统中作为反馈,用于交互力跟踪。我们估计的准确性通过校准的力/力矩传感器的测量结果进行了独立验证。使用配备Xela uSkin传感器的Allegro Hand,我们展示了通过以100Hz运行的导纳控制回路实现的精确力施加,误差范围高达0.12+/-0.08 [N],结果表明其在灵巧操作方面具有广阔的潜力。
🔬 方法详解
问题定义:论文旨在解决机器人手指与物体交互过程中,如何利用触觉传感器阵列进行精确力估计的问题。现有方法在复杂几何形状和非线性变形情况下,力估计精度不足,且数据校准效率低,难以满足实时控制需求。
核心思路:论文的核心思路是提出一种数据高效的校准方法,该方法能够快速建立触觉传感器读数与实际作用力之间的映射关系,并能够有效处理非线性和变形带来的影响。通过在线反馈控制,实现精确的力跟踪。
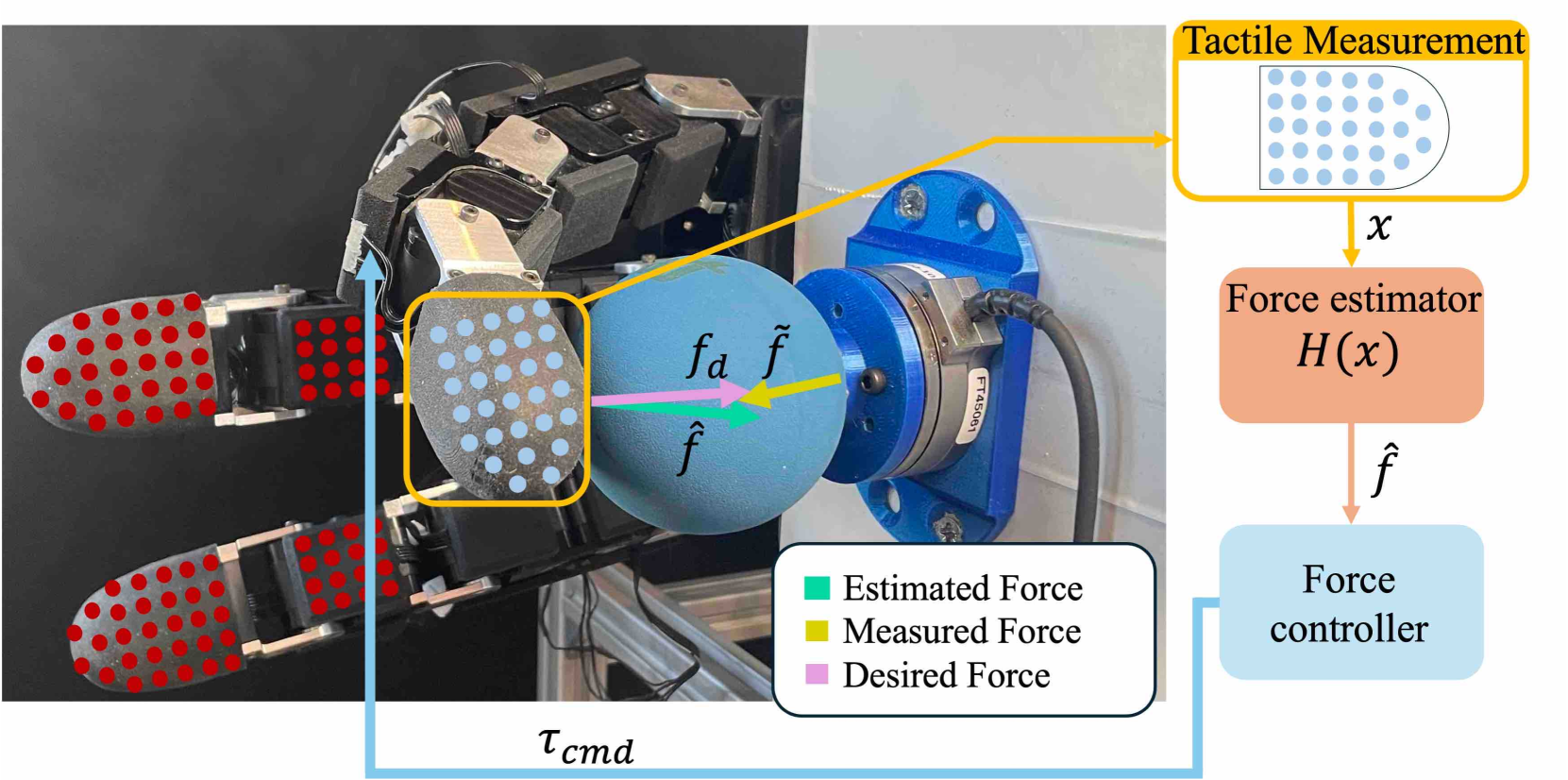
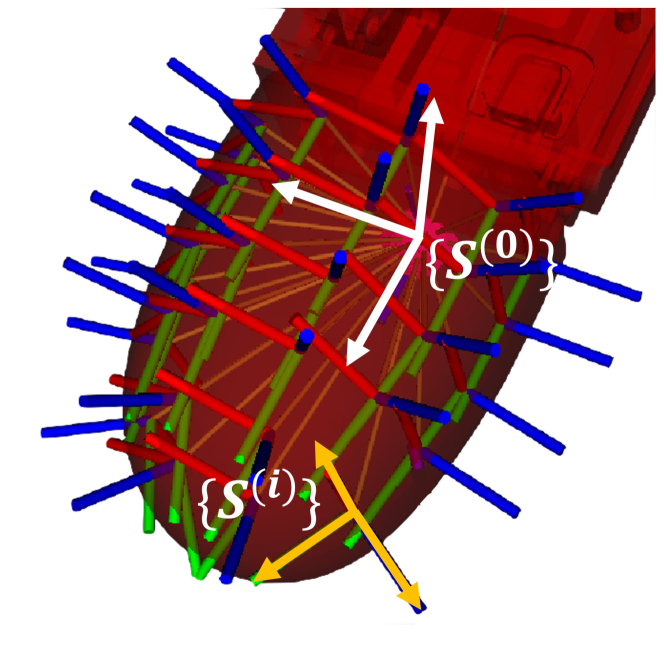
技术框架:整体框架包含三个主要模块:1) 触觉传感器数据采集;2) 基于数据高效校准的力估计模型;3) 基于力估计的闭环控制系统。首先,通过触觉传感器阵列采集接触信息。然后,利用提出的校准方法建立力估计模型,该模型能够将传感器读数转化为作用力估计。最后,将力估计结果作为反馈信号,输入到闭环控制系统中,实现对交互力的精确控制。
关键创新:论文的关键创新在于提出了一种数据高效的校准方法。传统方法需要大量的校准数据才能建立精确的力估计模型,而该方法通过优化校准过程,减少了所需的数据量,提高了校准效率。此外,该方法还考虑了非线性和变形效应,提高了力估计的准确性。
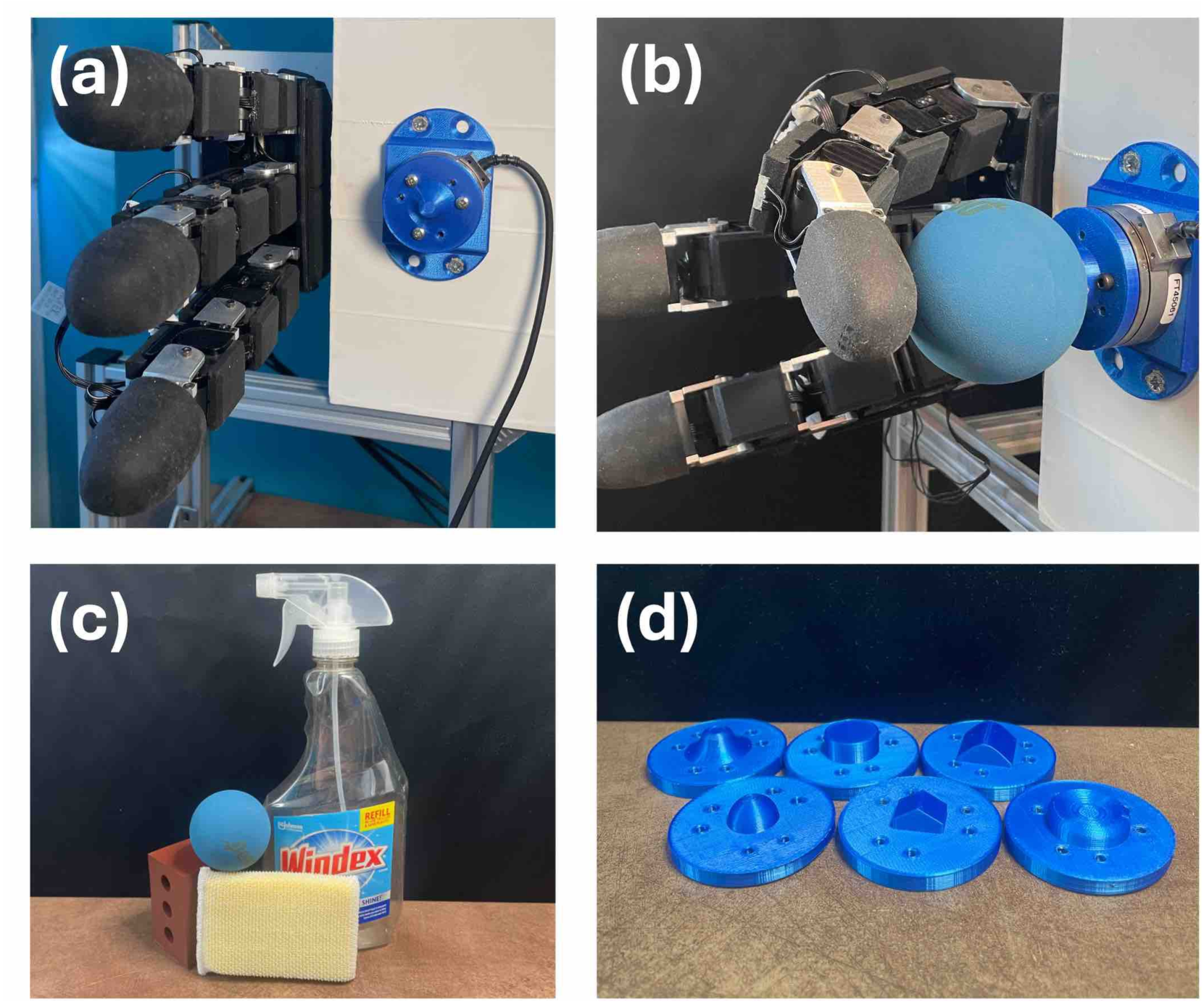
关键设计:论文采用Allegro Hand配备Xela uSkin传感器作为实验平台。校准过程采用优化的数据采集策略,减少了校准数据量。力估计模型采用非线性回归模型,以捕捉传感器读数与作用力之间的复杂关系。闭环控制系统采用导纳控制策略,以实现对交互力的精确控制。控制频率为100Hz。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在配备Xela uSkin传感器的Allegro Hand上实现了精确的力施加,通过100Hz的导纳控制回路,力估计误差范围达到0.12+/-0.08 [N]。该结果表明,所提出的方法具有良好的力估计精度和实时性,为灵巧操作提供了有力的支持。
🎯 应用场景
该研究成果可应用于各种需要精细操作的机器人应用场景,例如医疗机器人手术、精密装配、物体抓取和操作等。通过精确的力反馈控制,机器人能够更好地感知和控制与环境的交互,从而提高操作的精度和安全性。未来,该技术有望应用于更复杂的机器人系统,实现更智能、更灵活的操作。
📄 摘要(原文)
Fine dexterous manipulation requires reactive control based on rich sensing of manipulator-object interactions. Tactile sensing arrays provide rich contact information across the manipulator's surface. However their implementation faces two main challenges: accurate force estimation across complex surfaces like robotic hands, and integration of these estimates into reactive control loops. We present a data-efficient calibration method that enables rapid, full-array force estimation across varying geometries, providing online feedback that accounts for non-linearities and deformation effects. Our force estimation model serves as feedback in an online closed-loop control system for interaction force tracking. The accuracy of our estimates is independently validated against measurements from a calibrated force-torque sensor. Using the Allegro Hand equipped with Xela uSkin sensors, we demonstrate precise force application through an admittance control loop running at 100Hz, achieving up to 0.12+/-0.08 [N] error margin-results that show promising potential for dexterous manipulation.