FASTNav: Fine-tuned Adaptive Small-language-models Trained for Multi-point Robot Navigation
作者: Yuxuan Chen, Yixin Han, Xiao Li
分类: cs.RO, cs.AI, cs.HC
发布日期: 2024-11-20
期刊: in IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 390-397, Jan. 2025
💡 一句话要点
FASTNav:微调的自适应小型语言模型用于多点机器人导航
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人导航 小型语言模型 边缘计算 模型微调 师生学习 语言引导 多点导航
📋 核心要点
- 现有方法难以在资源受限的边缘设备上部署大型语言模型,限制了其在机器人导航中的应用。
- FASTNav通过微调、师生迭代等方法,提升小型语言模型在机器人导航任务中的性能,使其能够在边缘设备上运行。
- 实验结果表明,FASTNav能够以低成本、高精度和低响应时间实现语言引导的机器人导航。
📝 摘要(中文)
随着大型语言模型(LLM)的快速发展,机器人开始受益于LLM带来的新型交互方式。边缘计算满足了快速响应、隐私和网络自主性的需求,我们认为它有助于在各个行业中广泛部署用于机器人导航的大型模型。为了能够在边缘设备上本地部署语言模型,我们采用了一些模型提升方法。在本文中,我们提出了一种名为FASTNav的方法,用于提升轻量级LLM(也称为小型语言模型,SLM)在机器人导航方面的性能。该方法包含三个模块:微调、师生迭代和基于语言的多点机器人导航。我们在仿真和真实机器人中训练和评估了使用FASTNav的模型,证明了我们可以以低成本、高精度和低响应时间部署它们。与其他模型压缩方法相比,FASTNav在语言模型的本地部署方面显示出潜力,并且有望成为边缘设备上语言引导机器人导航的有前景的解决方案。
🔬 方法详解
问题定义:论文旨在解决如何在资源受限的边缘设备上部署语言模型,并利用其进行多点机器人导航的问题。现有方法要么依赖于大型语言模型,计算成本高昂,无法在边缘设备上运行;要么使用传统的导航算法,缺乏对自然语言指令的理解能力。
核心思路:论文的核心思路是利用小型语言模型(SLM),并通过模型提升方法,使其在机器人导航任务中达到与大型语言模型相近的性能。通过微调和师生迭代,将大型语言模型的知识迁移到小型语言模型中,从而提高其导航能力。
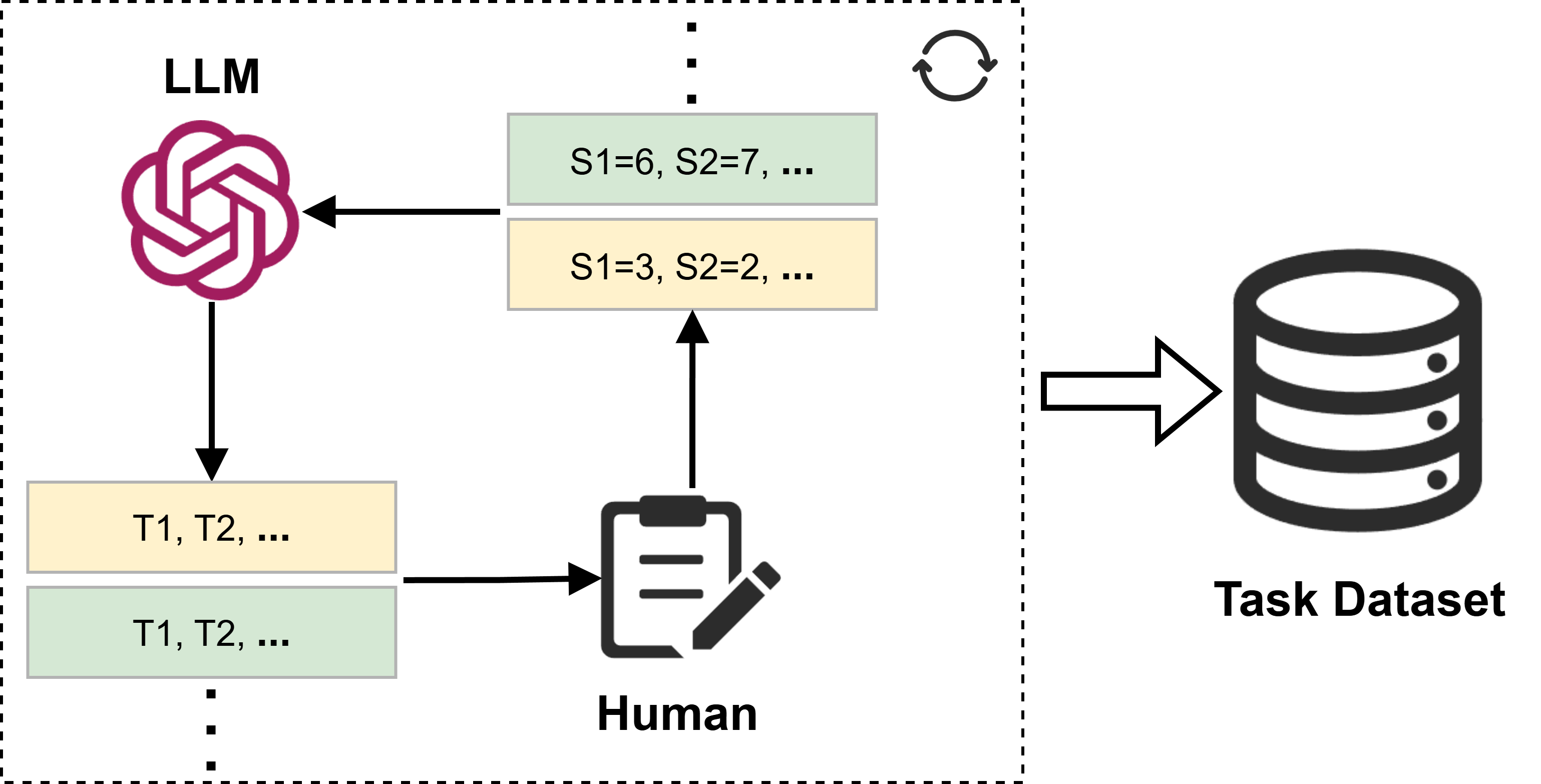
技术框架:FASTNav方法包含三个主要模块:1) 微调(Fine-tuning):使用机器人导航相关的数据集对小型语言模型进行微调,使其适应导航任务。2) 师生迭代(Teacher-Student Iteration):利用大型语言模型作为教师模型,指导小型语言模型(学生模型)的学习,通过迭代训练,提高学生模型的性能。3) 基于语言的多点机器人导航(Language-based Multi-point Robot Navigation):将语言指令作为输入,小型语言模型输出导航指令,控制机器人依次到达多个目标点。
关键创新:FASTNav的关键创新在于其模型提升方法,即通过微调和师生迭代,有效地将大型语言模型的知识迁移到小型语言模型中,使其能够在边缘设备上实现高性能的语言引导机器人导航。与传统的模型压缩方法相比,FASTNav更注重于提升小型语言模型在特定任务上的性能。
关键设计:论文中可能涉及的关键设计包括:1) 微调数据集的选择和构建,需要包含丰富的机器人导航场景和语言指令。2) 师生迭代过程中,教师模型的选择和学生模型的训练策略,例如损失函数的选择、学习率的调整等。3) 基于语言的多点机器人导航模块中,语言指令的解析和导航指令的生成方式,以及机器人控制算法的设计。
🖼️ 关键图片


📊 实验亮点
论文在仿真和真实机器人环境中进行了实验验证,结果表明FASTNav能够以低成本、高精度和低响应时间实现语言引导的机器人导航。具体的性能数据(例如导航成功率、响应时间等)以及与基线方法的对比结果(例如与其他模型压缩方法的性能比较)需要在论文中查找。
🎯 应用场景
FASTNav具有广泛的应用前景,例如在智能家居、仓储物流、医疗服务等领域,可以实现基于自然语言指令的机器人导航。该技术能够降低机器人部署成本,提高响应速度和隐私安全性,促进机器人技术的普及和应用。未来,FASTNav可以与其他技术相结合,例如视觉导航、SLAM等,实现更智能、更可靠的机器人导航。
📄 摘要(原文)
With the rapid development of large language models (LLM), robots are starting to enjoy the benefits of new interaction methods that large language models bring. Because edge computing fulfills the needs for rapid response, privacy, and network autonomy, we believe it facilitates the extensive deployment of large models for robot navigation across various industries. To enable local deployment of language models on edge devices, we adopt some model boosting methods. In this paper, we propose FASTNav - a method for boosting lightweight LLMs, also known as small language models (SLMs), for robot navigation. The proposed method contains three modules: fine-tuning, teacher-student iteration, and language-based multi-point robot navigation. We train and evaluate models with FASTNav in both simulation and real robots, proving that we can deploy them with low cost, high accuracy and low response time. Compared to other model compression methods, FASTNav shows potential in the local deployment of language models and tends to be a promising solution for language-guided robot navigation on edge devices.