An Integrated Approach to Robotic Object Grasping and Manipulation
作者: Owais Ahmed, M Huzaifa, M Areeb, Hamza Ali Khan
分类: cs.RO, cs.CV
发布日期: 2024-11-20 (更新: 2025-07-29)
💡 一句话要点
提出一种集成方法,解决仓库机器人抓取和操作中物体位置不确定问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人抓取 物体操作 仓库自动化 位置不确定性 自主适应 运动规划 深度学习
📋 核心要点
- 核心问题是仓库机器人拣选物品时,货架上物体位置不确定性带来的挑战。
- 该系统通过自主调整策略,即使在没有先验知识的情况下也能定位和抓取目标物体。
- 该系统能够自主完成模拟订单,展示了在不确定环境下高效拣选物品的能力。
📝 摘要(中文)
为了应对仓库运营中日益增长的人工劳动和效率挑战,亚马逊正在通过引入机器人来协助各项任务,从而进行重大转型。虽然大量机器人已成功部署于仓库内的物品运输等任务,但从货架上拣选物品这一复杂过程仍然是一个重大挑战。本项目旨在开发一种创新的机器人系统,该系统能够通过高效地从货架上选择特定物品来自主完成模拟订单。该机器人系统的一个显著特点是,它能够应对货架每个箱子内物体位置不确定的挑战。该系统被设计为能够自主调整其方法,即使在缺乏关于物品放置位置的预先知识的情况下,也能采用能够有效定位和检索所需物品的策略。
🔬 方法详解
问题定义:论文旨在解决仓库环境中,机器人自主拣选物品时,由于货架上物品位置不确定性而导致的抓取和操作难题。现有方法通常依赖于预先设定的物体位置信息,但在实际应用中,物品位置的随机性使得这些方法难以有效工作。
核心思路:论文的核心思路是设计一个能够自主适应物体位置不确定性的机器人系统。该系统通过集成感知、规划和控制模块,使其能够根据实际环境调整抓取策略,从而实现高效的物品拣选。这种自适应性是解决物体位置不确定性的关键。
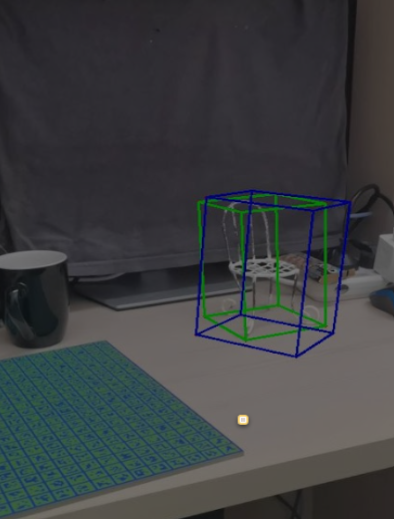
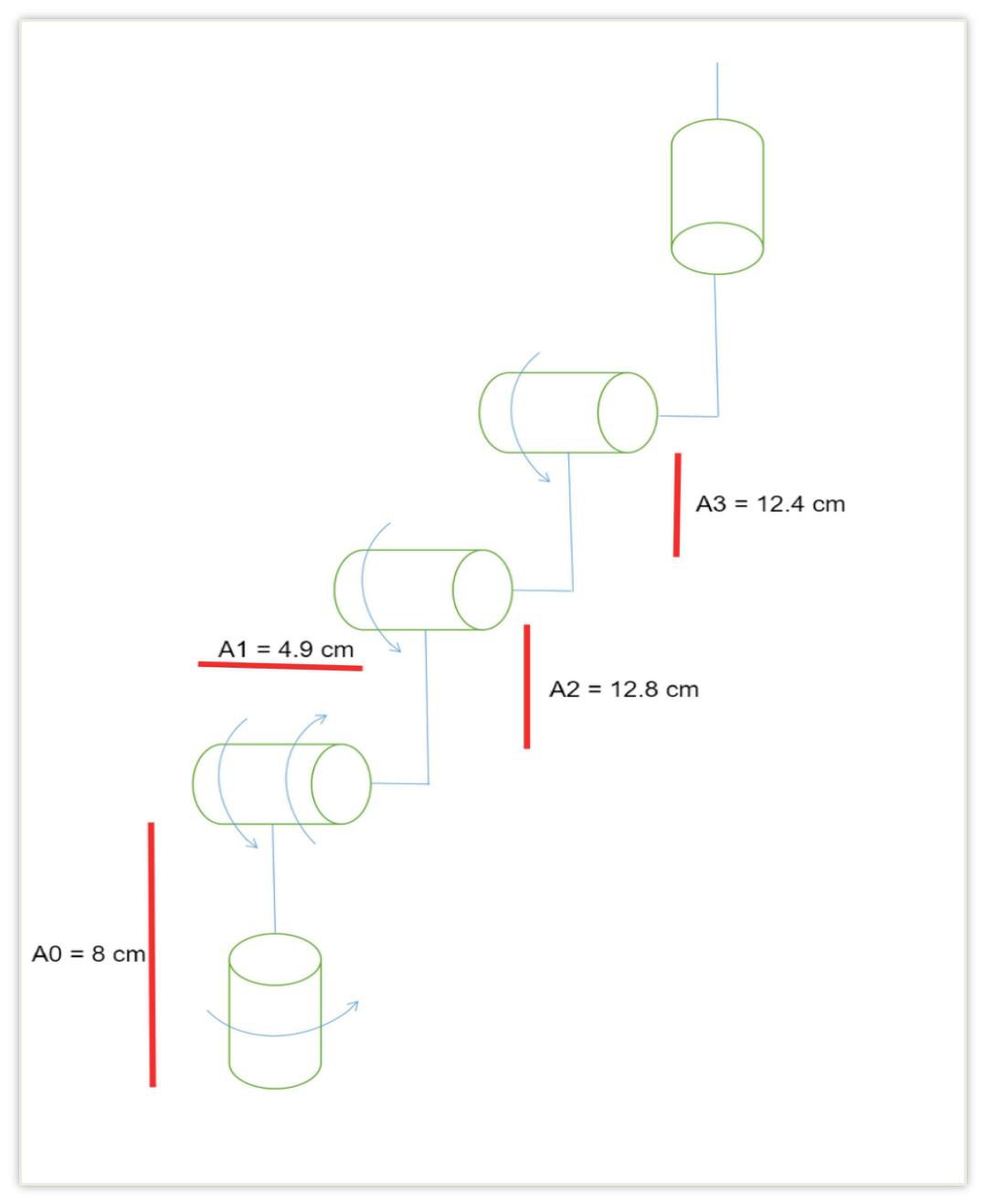
技术框架:该机器人系统包含以下主要模块:1) 感知模块:用于获取货架和物品的视觉信息,识别目标物体并估计其位置;2) 规划模块:根据感知信息,生成抓取和操作的运动轨迹;3) 控制模块:控制机器人执行规划的运动轨迹,完成物品的抓取和放置。整个流程是一个闭环反馈系统,能够根据实际情况进行调整。
关键创新:该论文的关键创新在于其集成的自适应抓取策略。与传统的预编程方法不同,该系统能够根据感知到的物体位置信息,动态调整抓取姿态和轨迹,从而提高抓取的成功率和效率。这种自适应性使得机器人能够应对更加复杂的环境。
关键设计:论文中可能涉及的关键设计包括:1) 使用深度学习方法进行物体识别和位置估计;2) 设计鲁棒的运动规划算法,以应对物体位置的不确定性;3) 采用力/位混合控制策略,提高抓取的稳定性。具体的参数设置、损失函数和网络结构等细节未知,需要参考论文全文。
🖼️ 关键图片

📊 实验亮点
由于摘要中没有提供具体的实验结果和性能数据,因此无法总结实验亮点。需要查阅论文全文才能了解具体的实验设置、对比基线以及性能提升幅度。目前已知该系统能够自主完成模拟订单,展示了其在不确定环境下的有效性。
🎯 应用场景
该研究成果可广泛应用于自动化仓库、智能物流、以及其他需要机器人进行物品拣选和操作的场景。通过提高机器人自主性和适应性,可以显著提升仓库运营效率,降低人工成本,并为未来的智能制造和智慧物流奠定基础。该技术还有潜力应用于家庭服务机器人,辅助完成日常物品的整理和取放。
📄 摘要(原文)
In response to the growing challenges of manual labor and efficiency in warehouse operations, Amazon has embarked on a significant transformation by incorporating robotics to assist with various tasks. While a substantial number of robots have been successfully deployed for tasks such as item transportation within warehouses, the complex process of object picking from shelves remains a significant challenge. This project addresses the issue by developing an innovative robotic system capable of autonomously fulfilling a simulated order by efficiently selecting specific items from shelves. A distinguishing feature of the proposed robotic system is its capacity to navigate the challenge of uncertain object positions within each bin of the shelf. The system is engineered to autonomously adapt its approach, employing strategies that enable it to efficiently locate and retrieve the desired items, even in the absence of pre-established knowledge about their placements.