HEIGHT: Heterogeneous Interaction Graph Transformer for Robot Navigation in Crowded and Constrained Environments
作者: Shuijing Liu, Haochen Xia, Fatemeh Cheraghi Pouria, Kaiwen Hong, Neeloy Chakraborty, Zichao Hu, Joydeep Biswas, Katherine Driggs-Campbell
分类: cs.RO, cs.AI, cs.LG
发布日期: 2024-11-19 (更新: 2025-12-19)
备注: Accepted to IEEE Transactions of Automation Science and Engineering (T-ASE)
💡 一句话要点
提出HEIGHT,利用异构交互图Transformer解决复杂环境下的机器人导航问题
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人导航 深度强化学习 异构图 Transformer 拥挤环境 人机交互 时空建模
📋 核心要点
- 现有方法在拥挤环境中机器人导航时,未能充分考虑智能体和障碍物间复杂的时空交互,导致路径不安全且低效。
- 论文提出HEIGHT,一种基于异构时空图Transformer的导航策略网络,利用注意力机制和循环网络建模异构交互。
- 实验表明,HEIGHT在成功率、导航时间和泛化能力上优于现有方法,尤其是在复杂导航场景中。
📝 摘要(中文)
本文研究了在拥挤且受约束的环境中(如走廊和家具),机器人导航的问题。现有方法未能充分考虑智能体和障碍物之间各种类型的时空交互,导致机器人路径不安全且效率低下。本文利用拥挤和受约束场景的图表示,并提出了一个结构化的框架,通过深度强化学习来学习机器人导航策略。首先,分离不同输入的表示,并提出一个异构时空图来建模人类、机器人和障碍物之间不同的交互。基于此,提出了HEIGHT,一种新颖的导航策略网络架构,包含不同的组件,通过空间和时间捕获异构交互。HEIGHT利用注意力机制来优先考虑重要的交互,并利用循环网络来跟踪动态场景随时间的变化,从而鼓励机器人自适应地避开碰撞。通过大量的模拟和真实世界实验,证明了HEIGHT在成功率、导航时间和泛化能力方面优于最先进的基线方法。
🔬 方法详解
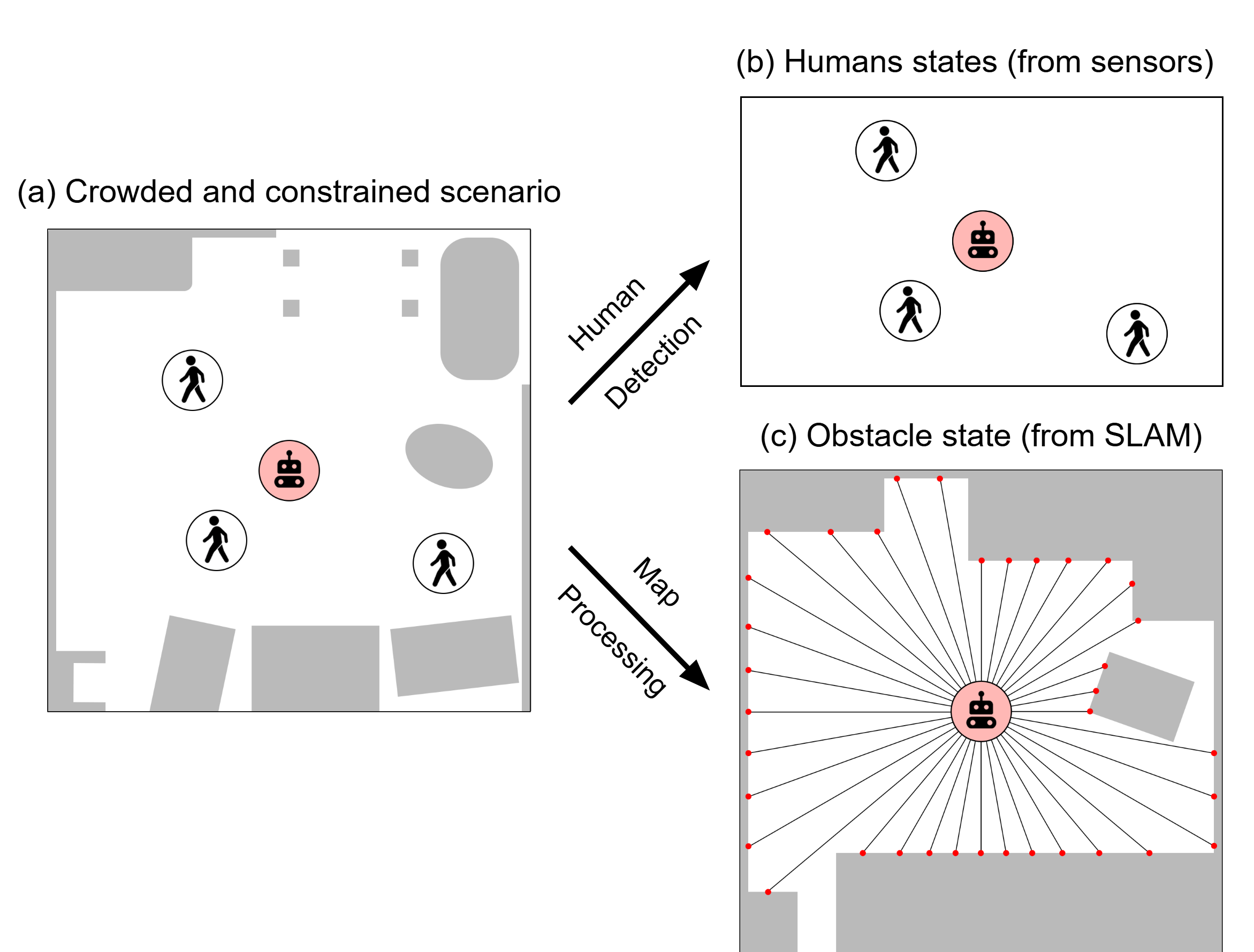
问题定义:论文旨在解决在拥挤和受约束环境中,机器人如何安全、高效地导航的问题。现有方法的痛点在于无法充分建模人类、机器人和静态障碍物之间复杂的时空交互关系,导致机器人容易发生碰撞,导航效率低下,并且难以泛化到新的场景。
核心思路:论文的核心思路是利用异构图来表示场景中的各种实体(人类、机器人、障碍物)及其之间的交互关系,并使用Transformer网络来学习在这种异构图上的导航策略。通过异构图,可以区分不同类型的交互,例如人与人之间的交互、人与机器人之间的交互以及机器人与障碍物之间的交互。Transformer网络则可以有效地捕捉这些交互关系,并生成安全的导航策略。
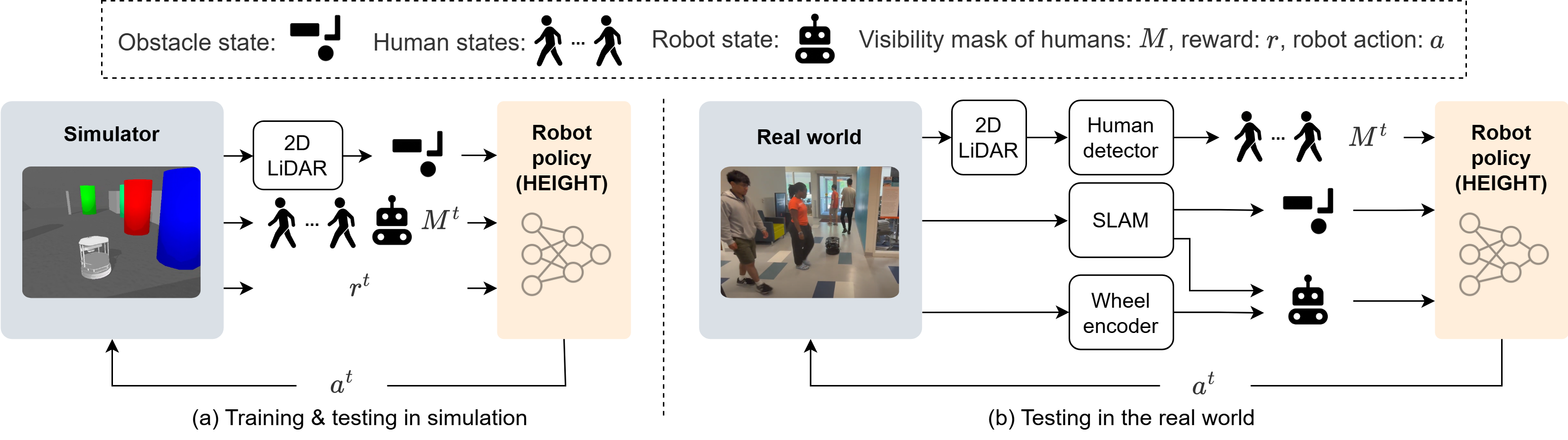
技术框架:HEIGHT的整体框架包括以下几个主要模块:1) 异构时空图构建模块:该模块将场景中的实体表示为图中的节点,并将实体之间的交互关系表示为图中的边。边包含了空间关系和时间关系。2) 异构图Transformer模块:该模块使用Transformer网络来学习异构图上的节点表示。该模块利用注意力机制来关注重要的交互关系。3) 循环网络模块:该模块使用循环网络来跟踪动态场景随时间的变化,并更新节点表示。4) 导航策略生成模块:该模块基于学习到的节点表示,生成机器人的导航策略。
关键创新:HEIGHT的关键创新在于提出了异构时空图来建模复杂环境中的交互关系,并设计了相应的Transformer网络来学习导航策略。与现有方法相比,HEIGHT能够更全面地考虑各种类型的交互,从而生成更安全、更高效的导航策略。此外,HEIGHT还利用循环网络来跟踪动态场景的变化,从而提高了导航策略的鲁棒性。
关键设计:HEIGHT的关键设计包括:1) 异构图的构建方式:论文定义了不同类型的节点和边来表示场景中的实体和交互关系。2) Transformer网络的结构:论文设计了一个专门用于处理异构图的Transformer网络,该网络能够区分不同类型的节点和边,并学习相应的表示。3) 损失函数的设计:论文使用强化学习来训练HEIGHT,并设计了一个奖励函数来鼓励机器人安全、高效地导航。
🖼️ 关键图片

📊 实验亮点
HEIGHT在模拟和真实世界实验中均表现出色。在模拟环境中,HEIGHT在成功率、导航时间和泛化能力方面均优于现有基线方法。例如,在某些复杂场景中,HEIGHT的成功率比现有方法提高了10%以上。在真实世界实验中,HEIGHT也能够安全、高效地在拥挤环境中导航,证明了其在实际应用中的潜力。
🎯 应用场景
该研究成果可应用于各种需要机器人在拥挤和受约束环境中导航的场景,例如:商场、医院、养老院、仓库等。通过提高机器人在复杂环境中的导航能力,可以提升服务效率,降低安全风险,并为人们提供更便捷的生活体验。未来,该技术有望进一步扩展到自动驾驶、智能家居等领域。
📄 摘要(原文)
We study the problem of robot navigation in dense and interactive crowds with static constraints such as corridors and furniture. Previous methods fail to consider all types of spatial and temporal interactions among agents and obstacles, leading to unsafe and inefficient robot paths. In this article, we leverage a graph-based representation of crowded and constrained scenarios and propose a structured framework to learn robot navigation policies with deep reinforcement learning. We first split the representations of different inputs and propose a heterogeneous spatio-temporal graph to model distinct interactions among humans, robots, and obstacles. Based on the heterogeneous spatio-temporal graph, we propose HEIGHT, a novel navigation policy network architecture with different components to capture heterogeneous interactions through space and time. HEIGHT utilizes attention mechanisms to prioritize important interactions and a recurrent network to track changes in the dynamic scene over time, encouraging the robot to avoid collisions adaptively. Through extensive simulation and real-world experiments, we demonstrate that HEIGHT outperforms state-of-the-art baselines in terms of success, navigation time, and generalization to domain shifts in challenging navigation scenarios. More information is available at https://sites.google.com/view/crowdnav-height/home.