Simultaneous Ground Reaction Force and State Estimation via Constrained Moving Horizon Estimation
作者: Jiarong Kang, Xiaobin Xiong
分类: cs.RO
发布日期: 2024-11-18 (更新: 2025-03-17)
💡 一句话要点
提出基于约束移动 horizon 估计的地面反作用力和状态同步估计方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 地面反作用力估计 状态估计 移动 horizon 估计 腿式机器人 约束优化
📋 核心要点
- 传统基于动量的GRF估计方法难以处理传感器噪声,且忽略了浮动基座状态与广义动量动力学之间的耦合。
- 论文提出一种基于约束移动 horizon 估计(MHE)的框架,融合多种传感器数据和接触约束,实现GRF和状态的同步估计。
- 实验结果表明,该方法在多种腿式机器人上能够以高频率提供精确的GRF和状态估计,验证了其有效性。
📝 摘要(中文)
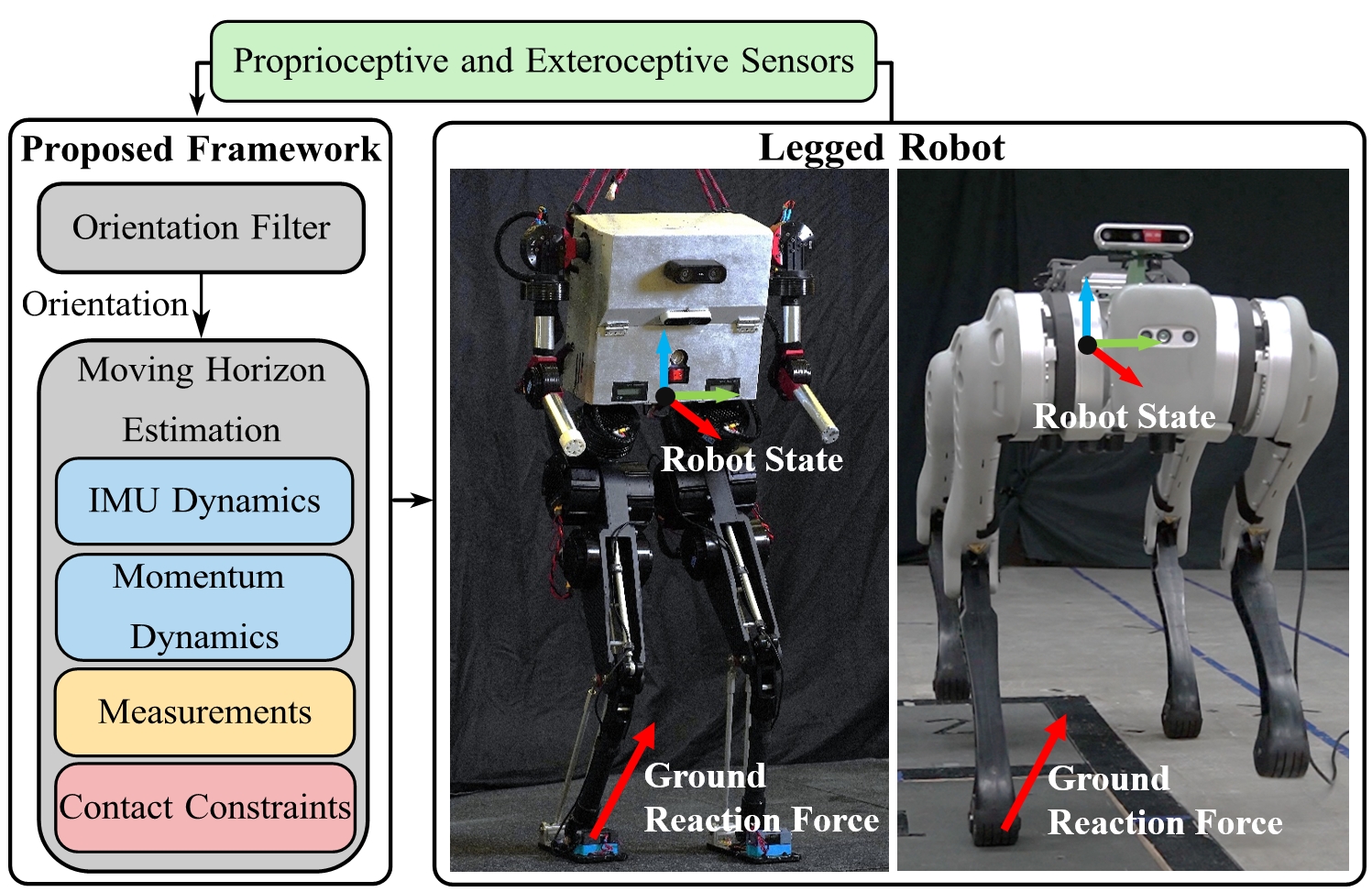
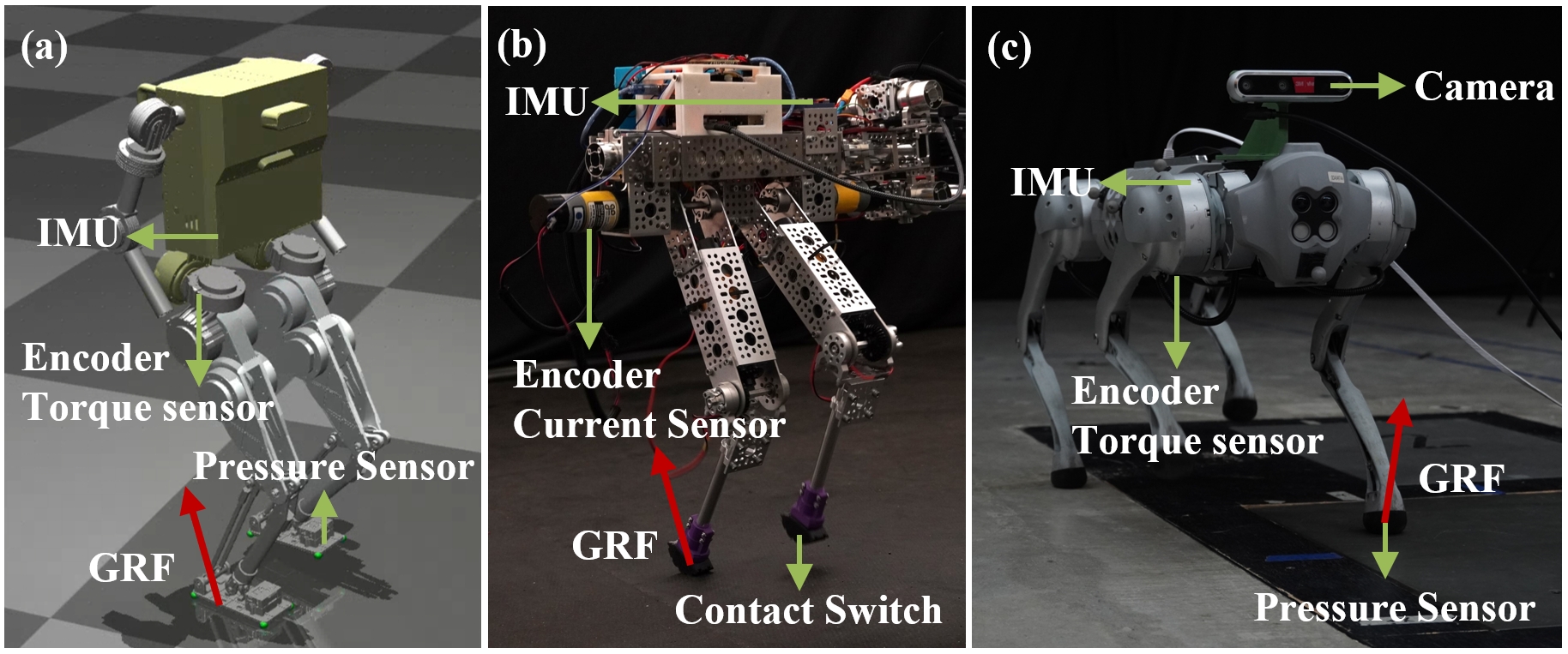
精确的地面反作用力(GRF)估计能够显著提高腿式机器人在各种实际应用中的适应性。例如,通过估计的GRF和接触运动学,运动控制和规划可以辅助机器人克服不确定的地形。传统的基于动量的方法被公式化为非线性观测器,但没有充分解决噪声测量以及浮动基座状态和广义动量动力学之间的依赖关系。本文提出了一种腿式机器人地面反作用力和状态同步估计框架,该框架系统地解决了传感器噪声以及状态和动力学之间的耦合问题。在单独估计浮动基座姿态的情况下,采用分散式移动 horizon 估计(MHE)方法,在凸窗口优化中融合机器人动力学、本体传感器、外部传感器和确定性接触互补约束。结果表明,该方法能够以200Hz的频率和0.04s的过去时间窗口,为包括定制的人形机器人Bucky、开源教育平面双足机器人STRIDE和四足机器人Unitree Go1在内的多种腿式机器人提供精确的GRF和状态估计。
🔬 方法详解
问题定义:论文旨在解决腿式机器人地面反作用力(GRF)和状态的精确同步估计问题。现有方法,特别是基于动量的非线性观测器,在处理传感器噪声、状态与动力学耦合以及接触约束方面存在不足,导致估计精度受限。
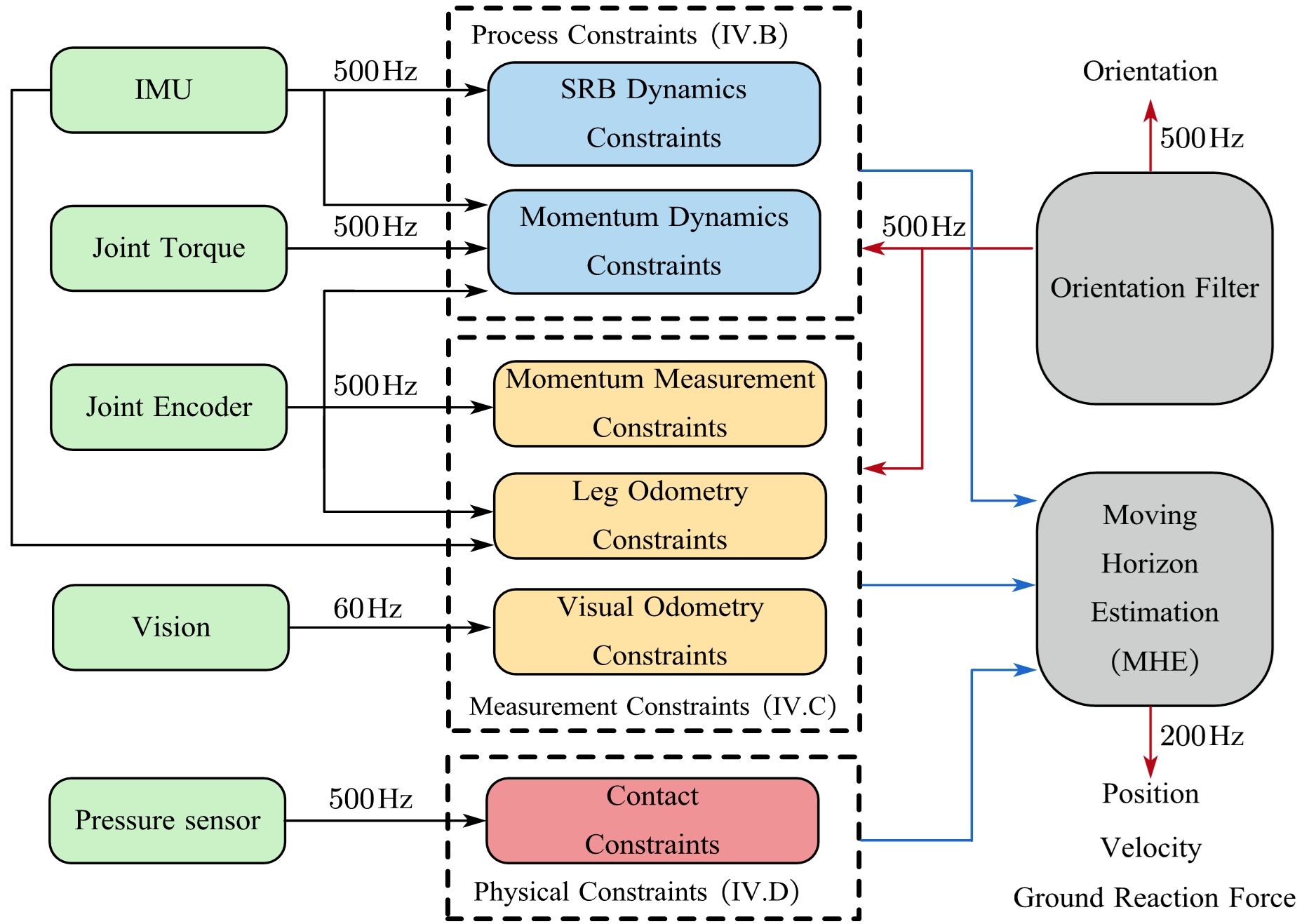
核心思路:论文的核心思路是利用移动 horizon 估计(MHE)框架,将GRF和状态估计问题转化为一个凸优化问题。通过在优化窗口内融合机器人动力学模型、本体传感器数据(如IMU、关节编码器)、外部传感器数据(如视觉里程计)以及接触互补约束,从而实现对噪声的有效抑制和对状态与动力学耦合关系的准确建模。
技术框架:整体框架包含两个主要部分:1) 浮动基座姿态估计:使用单独的算法估计机器人的姿态,例如视觉里程计或IMU融合算法。2) 基于MHE的GRF和状态估计:将姿态估计结果作为输入,构建一个分散式的MHE优化问题,在滑动的时间窗口内,最小化预测状态与观测状态之间的误差,同时满足动力学约束和接触约束。优化结果即为当前时刻的GRF和状态估计。
关键创新:论文的关键创新在于将GRF和状态估计问题置于一个约束优化框架下,并采用移动 horizon 估计方法。这种方法能够系统地处理传感器噪声、状态与动力学之间的耦合关系,并利用接触互补约束提高估计精度。与传统的非线性观测器相比,MHE方法具有更强的鲁棒性和更高的估计精度。
关键设计:MHE优化问题的关键设计包括:1) 状态向量的定义,通常包括机器人的位置、速度、姿态、角速度、关节角度和关节角速度。2) 优化窗口的长度,需要根据机器人运动速度和传感器噪声水平进行调整。3) 损失函数的选择,通常包括状态预测误差、传感器观测误差和接触约束违反程度。4) 接触互补约束的建模,需要根据机器人的足端形状和接触环境进行设计。论文中提到使用凸优化方法,意味着损失函数和约束条件都被设计成凸函数,以便于高效求解。
🖼️ 关键图片
📊 实验亮点
实验结果表明,所提出的方法能够在多种腿式机器人(包括人形机器人Bucky、双足机器人STRIDE和四足机器人Unitree Go1)上实现高精度的GRF和状态估计。该方法能够以200Hz的频率和0.04s的过去时间窗口运行,表明其具有良好的实时性。虽然论文中没有明确给出与现有方法的量化对比数据,但强调了该方法在处理传感器噪声和状态耦合方面的优势,暗示了其在精度和鲁棒性方面的提升。
🎯 应用场景
该研究成果可广泛应用于腿式机器人的运动控制、导航和规划等领域。精确的GRF和状态估计能够帮助机器人更好地适应复杂地形,提高运动的稳定性和鲁棒性。例如,在搜救、物流、巡检等场景中,腿式机器人需要克服崎岖不平的地形,准确的GRF估计可以帮助机器人调整步态,防止跌倒,从而完成任务。此外,该技术还可以应用于人机交互领域,例如外骨骼机器人和康复机器人。
📄 摘要(原文)
Accurate ground reaction force (GRF) estimation can significantly improve the adaptability of legged robots in various real-world applications. For instance, with estimated GRF and contact kinematics, the locomotion control and planning assist the robot in overcoming uncertain terrains. The canonical momentum-based methods, formulated as nonlinear observers, do not fully address the noisy measurements and the dependence between floating-base states and the generalized momentum dynamics. In this paper, we present a simultaneous ground reaction force and state estimation framework for legged robots, which systematically addresses the sensor noise and the coupling between states and dynamics. With the floating base orientation estimated separately, a decentralized Moving Horizon Estimation (MHE) method is implemented to fuse the robot dynamics, proprioceptive sensors, exteroceptive sensors, and deterministic contact complementarity constraints in a convex windowed optimization. The proposed method is shown to be capable of providing accurate GRF and state estimation on several legged robots, including the custom-designed humanoid robot Bucky, the open-source educational planar bipedal robot STRIDE, and the quadrupedal robot Unitree Go1, with a frequency of 200Hz and a past time window of 0.04s.