RoboGSim: A Real2Sim2Real Robotic Gaussian Splatting Simulator
作者: Xinhai Li, Jialin Li, Ziheng Zhang, Rui Zhang, Fan Jia, Tiancai Wang, Haoqiang Fan, Kuo-Kun Tseng, Ruiping Wang
分类: cs.RO, cs.CV
发布日期: 2024-11-18 (更新: 2025-08-03)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
RoboGSim:基于高斯溅射的Real2Sim2Real机器人仿真器,提升策略学习的真实性与效率。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 机器人仿真 高斯溅射 Real2Sim2Real 策略学习 数字孪生
📋 核心要点
- 现有机器人仿真器难以兼顾高保真纹理和物理建模,限制了大规模机器人策略学习的数据获取。
- RoboGSim利用3D高斯溅射和物理引擎,构建real2sim2real仿真环境,实现逼真的纹理和物理交互。
- 实验表明,RoboGSim数据在真实机器人上实现了与真实数据相当甚至更好的零样本性能,有效缩小了sim2real差距。
📝 摘要(中文)
本文提出RoboGSim,一个基于3D高斯溅射和物理引擎的real2sim2real机器人仿真器,旨在解决现有仿真器在纹理和物理建模方面的高保真度不足问题,以及真实世界机器人数据采集成本高昂的问题。RoboGSim主要包含四个部分:高斯重建器、数字孪生构建器、场景合成器和交互引擎。它可以合成具有新视角、新对象、新轨迹和新场景的模拟数据,并为不同的操作策略提供在线、可复现和安全的评估。real2sim和sim2real迁移实验表明,该仿真器在纹理和物理方面具有高度一致性。在RoboGSim和真实机器人平台上进行的测试结果表明,RoboGSim数据模型可以在真实机器人上实现零样本性能,结果与真实机器人数据相当。此外,在新的视角和新的场景实验中,RoboGSim数据模型在真实机器人上的表现甚至优于真实机器人数据模型。这不仅有助于缩小sim2real差距,还有助于解决真实机器人数据收集的局限性,例如其单一来源和高成本。希望RoboGSim能作为一个闭环仿真器,为策略学习提供公平的比较。
🔬 方法详解
问题定义:现有机器人仿真器在纹理和物理建模方面存在不足,导致sim2real差距较大,限制了在仿真环境中训练的策略在真实机器人上的应用。同时,真实机器人数据采集成本高昂,难以扩展数据规模。因此,需要一种能够高保真地模拟真实环境,并能高效生成大规模数据的机器人仿真器。
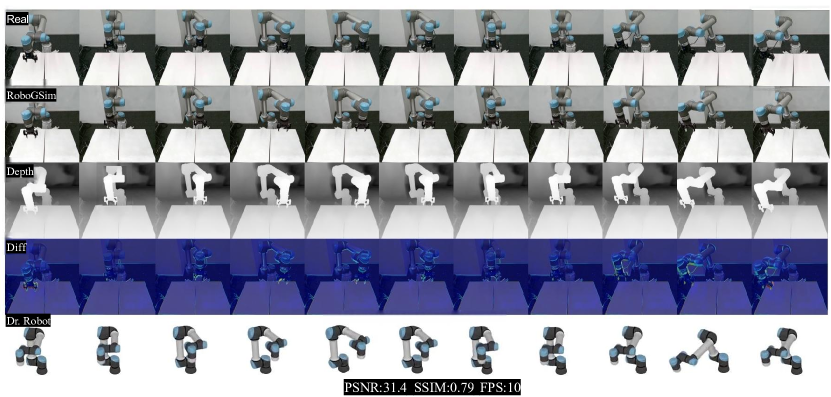
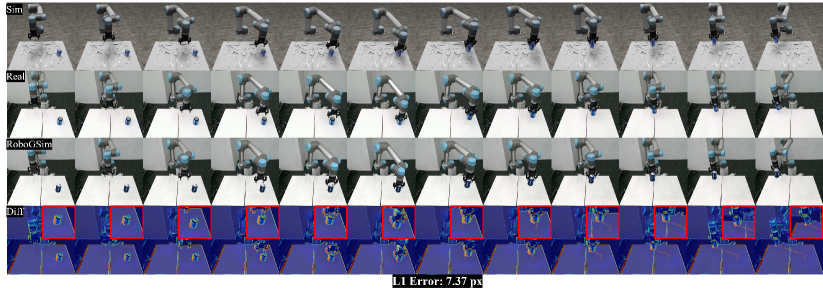
核心思路:RoboGSim的核心思路是利用3D高斯溅射技术对真实世界进行高精度重建,构建数字孪生环境,然后结合物理引擎模拟真实世界的物理交互。通过这种real2sim2real的方式,可以生成具有逼真纹理和物理特性的仿真数据,从而缩小sim2real差距。
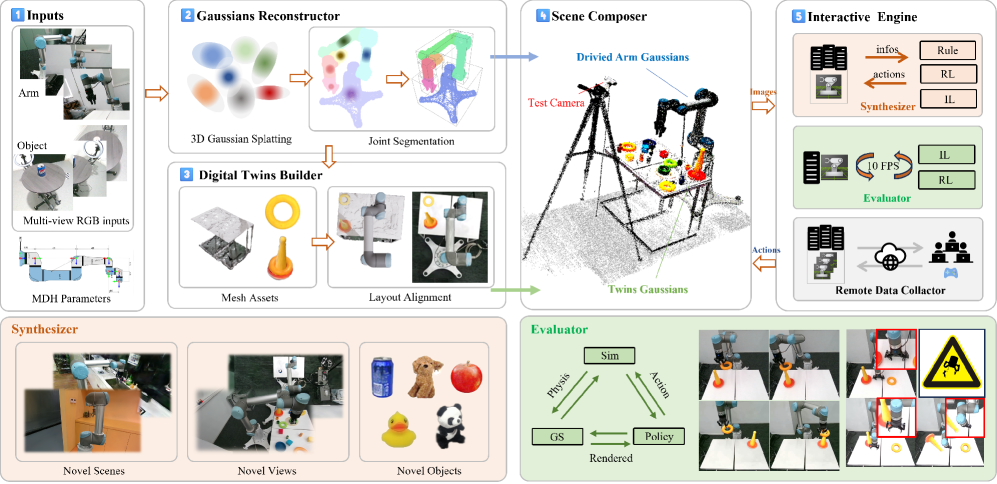
技术框架:RoboGSim主要包含四个模块:1) 高斯重建器:使用3D高斯溅射技术从真实世界图像中重建场景的三维表示。2) 数字孪生构建器:基于高斯重建结果,构建数字孪生环境,包括场景几何、纹理和材质等。3) 场景合成器:允许用户在数字孪生环境中合成新的对象、轨迹和场景,以生成多样化的训练数据。4) 交互引擎:使用物理引擎模拟机器人与环境的交互,生成交互数据。
关键创新:RoboGSim的关键创新在于将3D高斯溅射技术应用于机器人仿真,实现了对真实世界的高保真重建。与传统的基于mesh或voxel的仿真器相比,高斯溅射能够更精确地捕捉场景的细节,从而生成更逼真的仿真数据。此外,RoboGSim还提供了一个完整的real2sim2real流程,方便用户进行数据生成、策略训练和评估。
关键设计:RoboGSim使用3D高斯溅射技术进行场景重建,具体实现细节未知。物理引擎的选择和参数设置对仿真结果的真实性至关重要,但论文中没有详细说明。损失函数的设计可能包括重建损失、物理一致性损失等,以保证仿真数据的质量。网络结构方面,论文没有涉及策略学习的具体网络结构,重点在于仿真环境的构建。
🖼️ 关键图片
📊 实验亮点
RoboGSim在真实机器人上实现了零样本性能,与使用真实机器人数据训练的模型性能相当,甚至在新的视角和场景下表现更优。这表明RoboGSim能够有效缩小sim2real差距,并克服真实机器人数据收集的局限性。具体性能数据和对比基线在摘要中有所提及,但未提供详细的数值结果。
🎯 应用场景
RoboGSim可应用于机器人操作策略学习、自动驾驶仿真、虚拟现实等领域。通过该仿真器,可以高效生成大规模、高质量的训练数据,加速机器人算法的开发和部署。此外,RoboGSim还可用于安全评估机器人策略,避免在真实环境中进行危险实验。未来,该技术有望推动机器人技术在工业、医疗、服务等领域的广泛应用。
📄 摘要(原文)
Efficient acquisition of real-world embodied data has been increasingly critical. However, large-scale demonstrations captured by remote operation tend to take extremely high costs and fail to scale up the data size in an efficient manner. Sampling the episodes under a simulated environment is a promising way for large-scale collection while existing simulators fail to high-fidelity modeling on texture and physics. To address these limitations, we introduce the RoboGSim, a real2sim2real robotic simulator, powered by 3D Gaussian Splatting and the physics engine. RoboGSim mainly includes four parts: Gaussian Reconstructor, Digital Twins Builder, Scene Composer, and Interactive Engine. It can synthesize the simulated data with novel views, objects, trajectories, and scenes. RoboGSim also provides an online, reproducible, and safe evaluation for different manipulation policies. The real2sim and sim2real transfer experiments show a high consistency in the texture and physics. We compared the test results of RoboGSim data and real robot data on both RoboGSim and real robot platforms. The experimental results show that the RoboGSim data model can achieve zero-shot performance on the real robot, with results comparable to real robot data. Additionally, in experiments with novel perspectives and novel scenes, the RoboGSim data model performed even better on the real robot than the real robot data model. This not only helps reduce the sim2real gap but also addresses the limitations of real robot data collection, such as its single-source and high cost. We hope RoboGSim serves as a closed-loop simulator for fair comparison on policy learning. More information can be found on our project page https://robogsim.github.io/.