Remote Life Support Robot Interface System for Global Task Planning and Local Action Expansion Using Foundation Models
作者: Yoshiki Obinata, Haoyu Jia, Kento Kawaharazuka, Naoaki Kanazawa, Kei Okada
分类: cs.RO
发布日期: 2024-11-15
备注: Accepted to 2024 IEEE-RAS International Conference on Humanoids Robots (Humanoids 2024)
💡 一句话要点
提出基于模版变量的远程生命支持机器人交互系统,提升复杂任务场景下的指令执行能力
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人控制 人机交互 自然语言指令 模版变量 远程操作 生命支持 不确定信息处理
📋 核心要点
- 现有方法难以通过单一指令将现场不确定信息传递给机器人,限制了其在复杂环境中的应用。
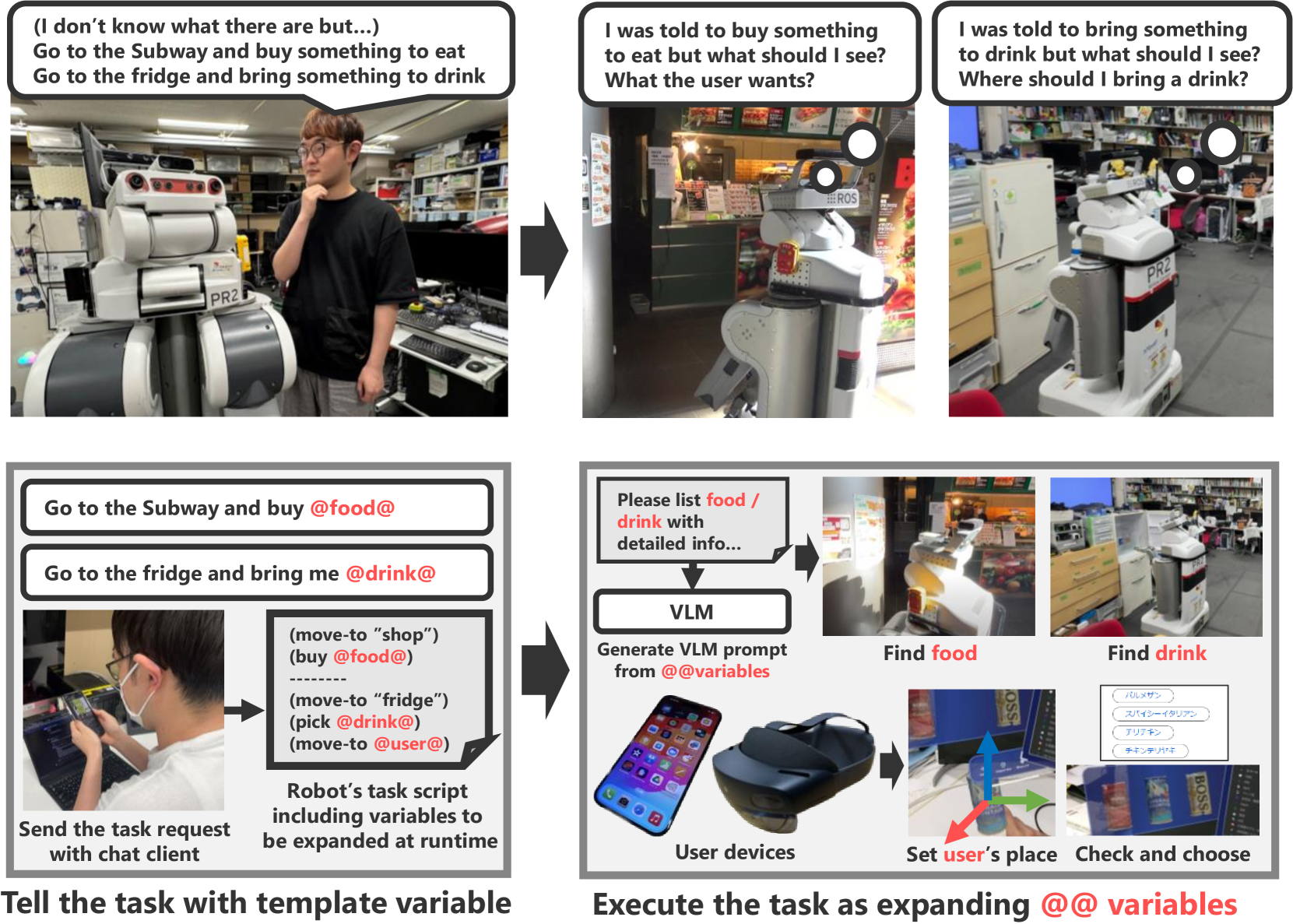
- 该系统在语言指令中引入模版变量,用于表示待收集信息和可选项,提升指令的灵活性和适应性。
- 通过实际生命支持任务验证,证明了该系统在处理不确定信息和提升人机交互效率方面的有效性。
📝 摘要(中文)
本文提出了一种机器人系统,该系统能够基于自然语言指令执行任务。针对仅能在现场确定的不确定信息难以通过单一语言指令传递给机器人的问题,本文提出在语言指令中包含带有模版变量的模糊部分,以此传递需要收集的信息以及为机器人呈现的可预测不确定事件的选项。该研究实现了基于模版变量为每个机器人动作功能生成提示,以收集信息,并实现了一个反馈系统,用于呈现和选择基于模版变量的选项,从而实现用户与机器人之间的通信。通过将所提出的系统应用于机器人执行的真实生命支持任务,验证了其有效性。
🔬 方法详解
问题定义:现有机器人系统在执行基于语言指令的任务时,面临着难以处理现场不确定信息的挑战。传统的单一指令无法涵盖所有可能情况,导致机器人无法灵活应对复杂环境。例如,在生命支持任务中,机器人需要根据现场情况选择不同的操作,而这些情况事先难以完全预测。
核心思路:本文的核心思路是在语言指令中引入模版变量,将指令分解为确定部分和不确定部分。确定部分直接指导机器人的基本操作,不确定部分则通过模版变量表示,用于收集现场信息或呈现可选项,从而实现更灵活和智能的指令执行。这种方法允许用户在指令中包含模糊信息,并由机器人根据实际情况进行填充和选择。
技术框架:该系统的整体框架包含以下几个主要模块:1) 指令解析模块:解析用户输入的包含模版变量的语言指令。2) 提示生成模块:基于模版变量,为每个机器人动作功能生成相应的提示,用于收集所需信息。3) 信息收集模块:通过传感器或用户反馈收集现场信息,填充模版变量。4) 选项呈现模块:根据模版变量,呈现可选项供用户选择。5) 动作执行模块:根据填充后的指令执行相应的机器人动作。6) 反馈系统:将执行结果反馈给用户,并允许用户进行调整和修正。
关键创新:该研究的关键创新在于将模版变量引入到机器人语言指令中,从而实现了对不确定信息的有效处理。与传统的单一指令方法相比,该方法能够更好地适应复杂环境,并提升人机交互的灵活性和效率。此外,该系统还实现了基于模版变量的提示生成和选项呈现机制,进一步增强了机器人的智能性和自主性。
关键设计:具体的模版变量设计需要根据具体的任务场景进行调整。例如,在生命支持任务中,模版变量可以用于表示待检查的生命体征、可选择的医疗设备等。提示生成模块可以采用基于规则的方法或基于深度学习的方法,根据模版变量和机器人动作功能生成相应的提示。选项呈现模块则需要根据可选项的数量和类型,选择合适的呈现方式,例如列表、菜单等。
🖼️ 关键图片


📊 实验亮点
该研究通过实际的生命支持任务验证了所提出系统的有效性。实验结果表明,该系统能够有效地处理不确定信息,并提升人机交互的效率。具体的性能数据(例如任务完成时间、错误率等)和与基线方法的对比结果(如果有)在论文中进行了详细描述,证明了该系统在实际应用中的优势。
🎯 应用场景
该研究成果可广泛应用于远程机器人操作、医疗辅助、灾难救援等领域。例如,在远程医疗中,医生可以通过该系统远程指导机器人进行诊断和治疗,尤其适用于资源匮乏或危险的环境。在灾难救援中,救援人员可以通过该系统远程控制机器人进行搜索和救援,提高救援效率和安全性。未来,该系统还可以与更先进的AI技术相结合,实现更智能和自主的机器人操作。
📄 摘要(原文)
Robot systems capable of executing tasks based on language instructions have been actively researched. It is challenging to convey uncertain information that can only be determined on-site with a single language instruction to the robot. In this study, we propose a system that includes ambiguous parts as template variables in language instructions to communicate the information to be collected and the options to be presented to the robot for predictable uncertain events. This study implements prompt generation for each robot action function based on template variables to collect information, and a feedback system for presenting and selecting options based on template variables for user-to-robot communication. The effectiveness of the proposed system was demonstrated through its application to real-life support tasks performed by the robot.