Experience-based Subproblem Planning for Multi-Robot Motion Planning
作者: Irving Solis, James Motes, Mike Qin, Marco Morales, Nancy M. Amato
分类: cs.RO
发布日期: 2024-11-13
💡 一句话要点
提出基于经验的子问题规划方法,提升多机器人运动规划效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人运动规划 经验学习 子问题规划 机器人协作 运动规划数据库
📋 核心要点
- 多机器人运动规划(MRMP)面临高维度和复杂交互的挑战,现有方法难以有效处理复杂场景,尤其是在机械臂机器人参与时。
- 该论文提出一种基于经验的子问题规划方法,通过构建和利用低维子问题的解决方案数据库,减少了对完整问题空间的搜索。
- 实验结果表明,该方法在可扩展性和规划效率方面优于现有方法,成功应用于包含大量移动和机械臂机器人的场景。
📝 摘要(中文)
多机器人系统在制造和监控等领域提高了效率和生产力。虽然单机器人运动规划通过使用先前解决方案的数据库得到了改进,但将这种方法扩展到多机器人运动规划(MRMP)由于任务和配置的复杂性增加而面临挑战。最近的离散方法试图通过关注相关的低维子问题来解决这个问题,但它们不足以应对涉及机械臂机器人的复杂场景。为了克服这一点,我们提出了一种新颖的方法,该方法通过构建和利用较小子问题的解决方案数据库来利用基于经验的规划。通过关注较少机器人之间的交互,我们的方法减少了对详尽数据库增长的需求,从而可以有效地处理更复杂的MRMP场景。我们通过涉及移动和机械臂机器人的实验验证了我们的方法,证明了其在可扩展性和规划效率方面优于现有方法。我们的贡献包括一个快速构建的低维MRMP问题数据库,一个将这些解决方案应用于更大问题的框架,以及对多达32个移动和16个机械臂机器人的实验验证。
🔬 方法详解
问题定义:多机器人运动规划(MRMP)旨在为多个机器人找到无碰撞的路径,使其从起始状态到达目标状态。现有方法,特别是离散方法,在处理高维度和复杂交互时面临挑战,导致计算成本高昂,难以扩展到大规模机器人系统。尤其是在包含机械臂机器人的复杂场景中,这些方法的性能会显著下降。
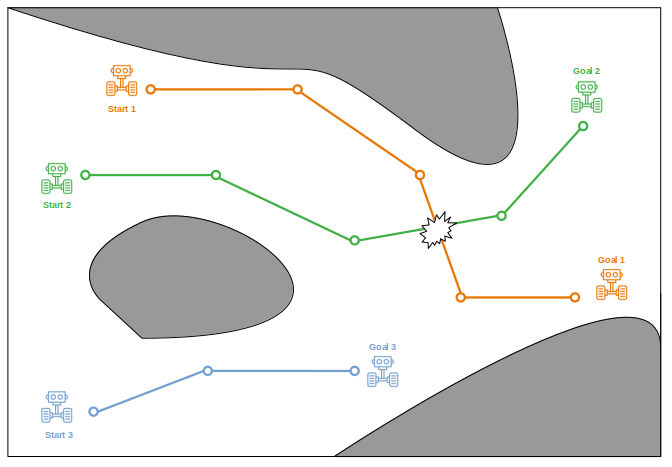
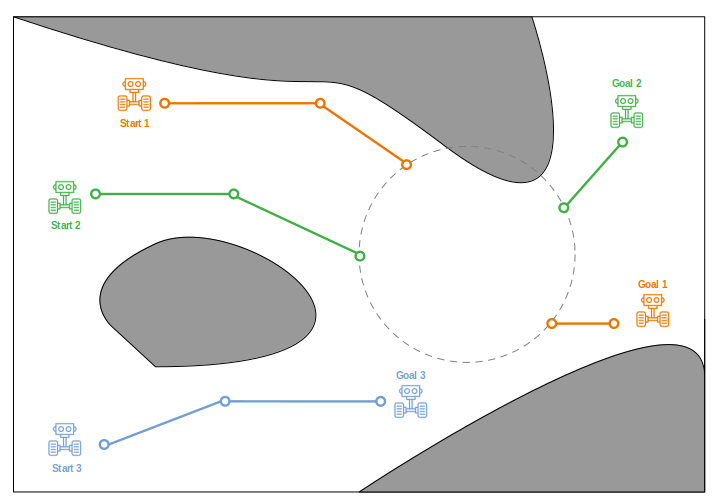
核心思路:该论文的核心思路是将复杂的MRMP问题分解为更小的、低维的子问题,并为这些子问题构建解决方案数据库。通过关注少量机器人之间的交互,可以显著降低搜索空间的大小,从而提高规划效率。当需要解决一个更大的MRMP问题时,可以从数据库中检索相关的子问题解决方案,并将它们组合起来,形成一个完整的解决方案。
技术框架:该方法包含以下主要阶段:1) 子问题识别:识别MRMP问题中需要解决的子问题,例如两个或三个机器人之间的交互。2) 子问题求解:为每个子问题构建解决方案数据库。这可以通过离线规划或在线学习来实现。3) 解决方案组合:将子问题的解决方案组合起来,形成一个完整的MRMP解决方案。这可以通过搜索或优化来实现。4) 解决方案验证:验证组合后的解决方案是否可行,并进行必要的调整。
关键创新:该方法最重要的技术创新点在于其基于经验的子问题规划策略。与传统的MRMP方法相比,该方法不需要对整个问题空间进行搜索,而是通过利用先前解决的子问题的解决方案来加速规划过程。这种方法特别适用于具有重复模式或结构的MRMP问题。与现有方法相比,该方法能够更好地处理高维度和复杂交互,并且具有更好的可扩展性。
关键设计:论文的关键设计包括:1) 如何有效地构建和存储子问题解决方案数据库。2) 如何识别MRMP问题中需要解决的子问题。3) 如何将子问题的解决方案组合起来,形成一个完整的MRMP解决方案。具体的参数设置和算法细节在论文中进行了详细描述,但摘要中未提供足够信息进行深入分析。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在可扩展性和规划效率方面优于现有方法。在包含多达32个移动机器人和16个机械臂机器人的场景中,该方法能够快速找到可行的解决方案,而现有方法则难以处理。具体的性能数据和对比基线在论文中进行了详细描述,但摘要中未提供具体数值。
🎯 应用场景
该研究成果可广泛应用于自动化制造、物流仓储、搜索救援、以及协同机器人等领域。通过提升多机器人运动规划的效率和可扩展性,可以实现更复杂的机器人协作任务,提高生产效率,降低运营成本,并在危险环境中替代人类进行作业。未来,该方法有望应用于更大规模、更复杂的机器人系统,例如自动驾驶车队和智能家居环境。
📄 摘要(原文)
Multi-robot systems enhance efficiency and productivity across various applications, from manufacturing to surveillance. While single-robot motion planning has improved by using databases of prior solutions, extending this approach to multi-robot motion planning (MRMP) presents challenges due to the increased complexity and diversity of tasks and configurations. Recent discrete methods have attempted to address this by focusing on relevant lower-dimensional subproblems, but they are inadequate for complex scenarios like those involving manipulator robots. To overcome this, we propose a novel approach that %leverages experience-based planning by constructs and utilizes databases of solutions for smaller sub-problems. By focusing on interactions between fewer robots, our method reduces the need for exhaustive database growth, allowing for efficient handling of more complex MRMP scenarios. We validate our approach with experiments involving both mobile and manipulator robots, demonstrating significant improvements over existing methods in scalability and planning efficiency. Our contributions include a rapidly constructed database for low-dimensional MRMP problems, a framework for applying these solutions to larger problems, and experimental validation with up to 32 mobile and 16 manipulator robots.